多无人机动态避障路径规划:基于阿尔法进化(Alpha Evolution,AE)算法的多个无人机动态避障路径规划(可以自定义无人机数量及起始点),MATLAB代码
一、阿尔法进化算法
阿尔法进化(Alpha Evolution,AE)算法是2024年提出的一种新型进化算法,其核心在于通过自适应基向量和随机步长的设计来更新解,从而提高算法的性能。以下是AE算法的主要步骤和特点:
主要步骤
初始化:在搜索空间中随机生成一组候选解,并评估其质量。
Alpha算子:通过采样候选解构建进化矩阵,并通过矩阵的对角线或加权操作估计种群状态。为了增强每一代估计的相关性,设计了两个进化路径来积累估计结果并实现基向量的自适应。
自适应步长:通过复合差分操作构建自适应步长,用于估计问题的梯度,从而加速AE的收敛。
随机步长:通过衰减因子α自适应调整基于搜索空间生成的随机步长,以平衡探索与开发。
边界约束与选择策略:使用“减半距离”方法确保解在搜索空间内,并通过贪婪选择策略将成功进化的解加入下一代。
特点
新颖的Alpha算子:AE算法仅使用一个Alpha算子来更新解,该算子实现了基向量的自适应,并集成了多种进化信息的提取和利用技术。
无特殊超参数:AE算法没有特殊的超参数,代码实现紧凑,易于理解和应用。
非隐喻算法:AE算法不依赖于隐喻,其数学模型直接呈现,避免了隐喻带来的复杂性。
快速收敛与高质量解:AE算法在多序列比对和工程设计问题中表现出快速收敛和高质量解的能力,具有广泛的应用前景。
AE算法通过其独特的Alpha算子和自适应机制,成功解决了传统进化算法中的诸多问题,在多个基准测试和实际应用中表现出色,证明了其在优化算法领域的重要价值。
参考文献:
[1]Gao H, Zhang Q. Alpha evolution: An efficient evolutionary algorithm with evolution path adaptation and matrix generation. Engineering Applications of Artificial Intelligence, 2024, 137: 109202.
二、无人机(UAV)三维路径规划
单个无人机三维路径规划数学模型参考如下文献:
Phung M D , Ha Q P . Safety-enhanced UAV Path Planning with Spherical Vector-based Particle Swarm Optimization[J]. arXiv e-prints, 2021.
每个无人机的目标函数由路径长度成本,安全性与可行性成本、飞行高度成本和路径平滑成本共同组成:
2.1路径长度成本
路径长度成本由相邻两个节点之间的欧氏距离和构成,其计算公式如下:
2.2路径安全性与可行性成本

路径安全性与可行性成本通过下式计算:

2.3路径飞行高度成本

飞行高度成本通过如下公式计算所得:

2.4路径平滑成本

投影向量通过如下公式计算:

转弯角度的计算公式为:
爬坡角度的计算公式为:

平滑成本的计算公式为:
2.5总成本(目标函数)

总成本由最优路径成本,安全性与可行性成本、飞行高度成本和路径平滑成本的线性加权所得。其中,b为加权系数。
2.6 动态窗口法原理
动态窗口法的核心思想是在速度空间中搜索最优速度向量,用于无人机动态避障其核心步骤包括:
- 速度窗口采样:根据无人机运动学约束,生成可行速度集 V s a m p l e V_{sample} Vsample;
- 轨迹预测:对每个采样速度,预测未来一段时间内的无人机轨迹;
- 评价函数计算:通过评价函数评估每条预测轨迹的优劣,筛选出最优轨迹对应的速度;
- 速度更新:将最优速度作为无人机的当前运动速度,完成局部路径规划。
评价函数包含目标趋近度、避障安全性和速度平滑性三个指标,其表达式为:
G ( v , ω ) = α ⋅ h e a d i n g ( v , ω ) + β ⋅ d i s t ( v , ω ) + γ ⋅ v e l o c i t y ( v , ω ) G(v,\omega)=\alpha \cdot heading(v,\omega)+\beta \cdot dist(v,\omega)+\gamma \cdot velocity(v,\omega) G(v,ω)=α⋅heading(v,ω)+β⋅dist(v,ω)+γ⋅velocity(v,ω)
其中, α , β , γ \alpha,\beta,\gamma α,β,γ 为权重系数, h e a d i n g heading heading 表示轨迹与目标方向的夹角, d i s t dist dist 表示轨迹与障碍物的最小距离, v e l o c i t y velocity velocity 表示轨迹的速度大小。
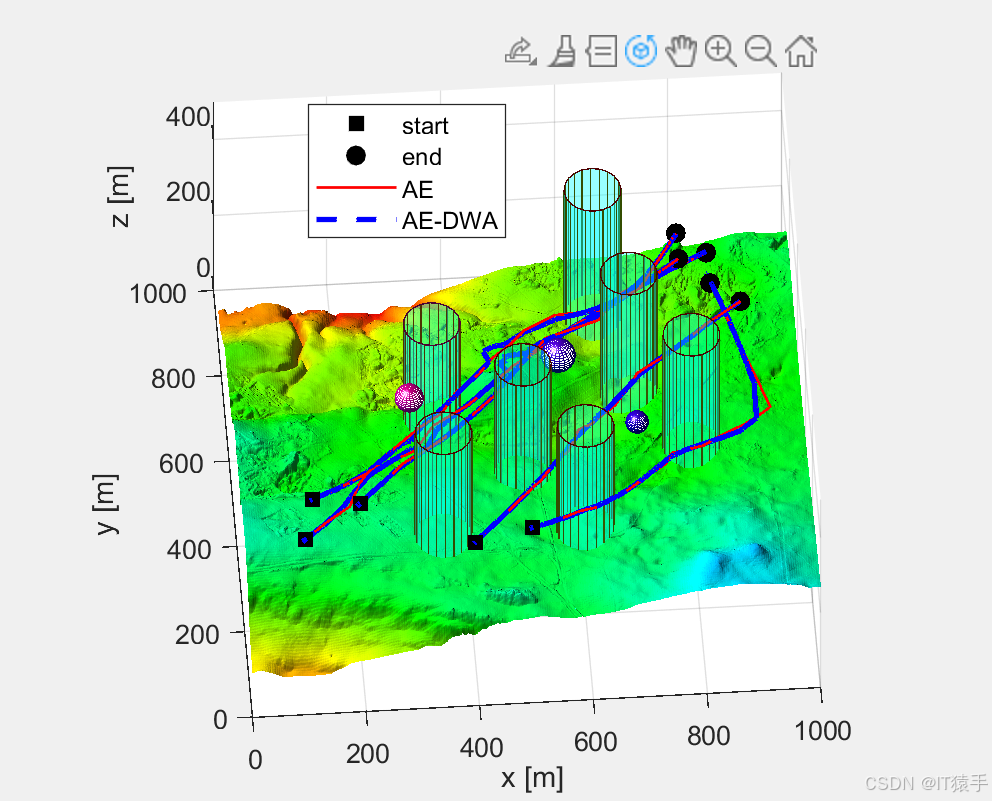
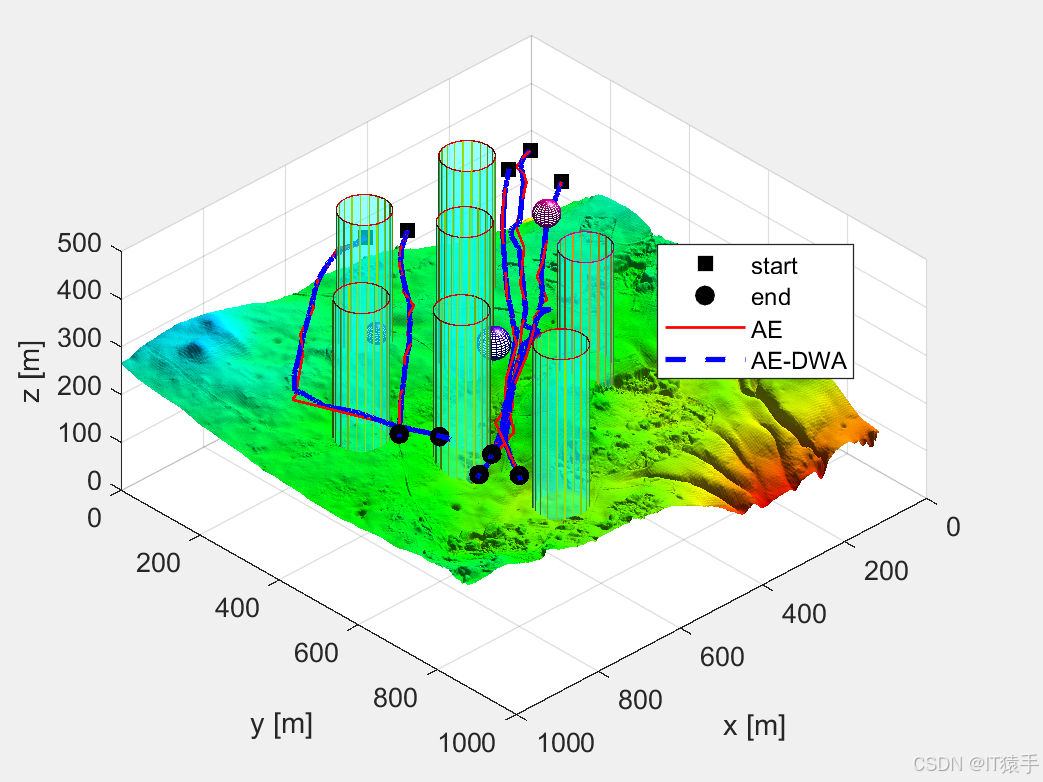
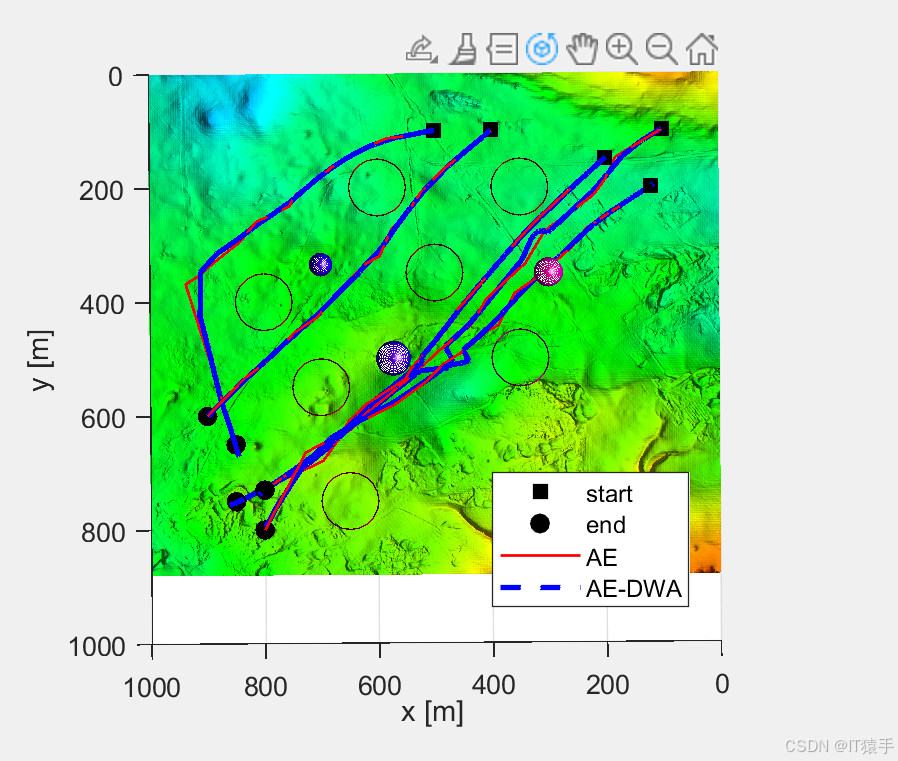
三、实验结果
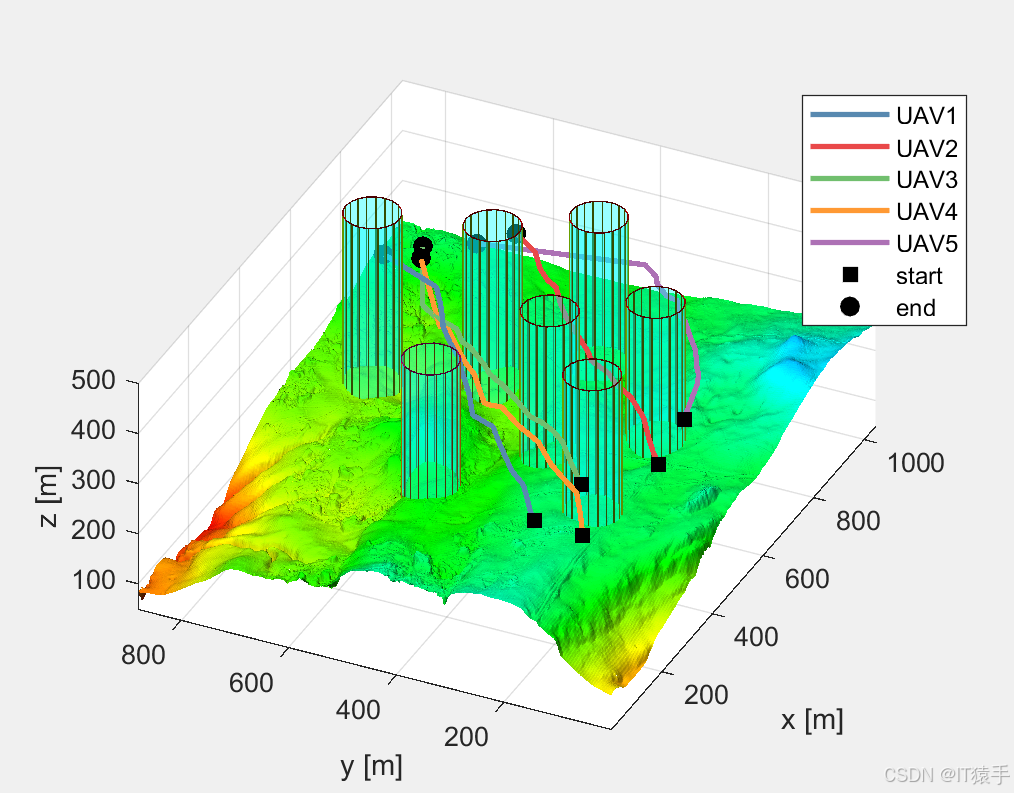
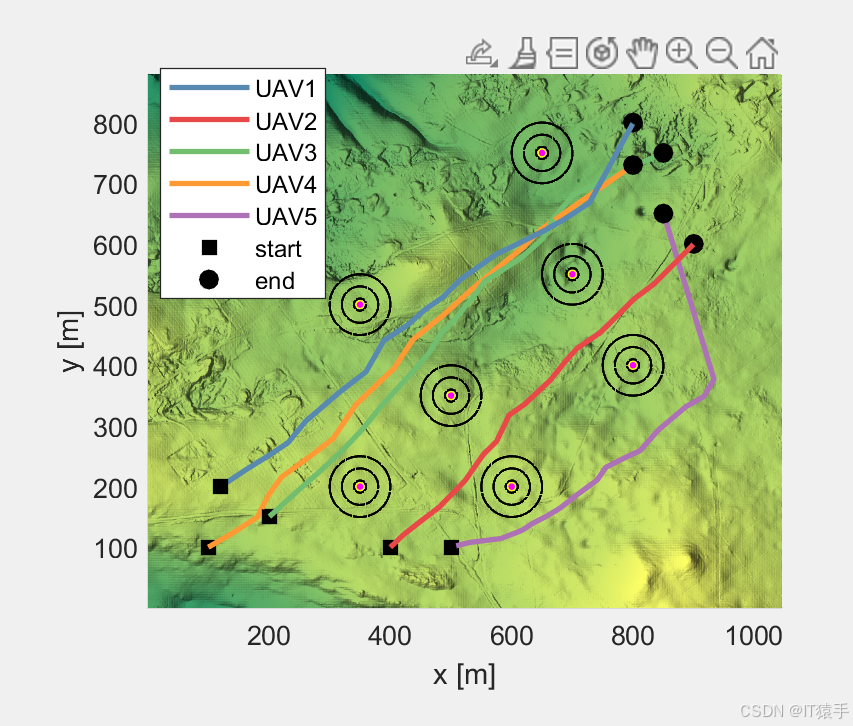
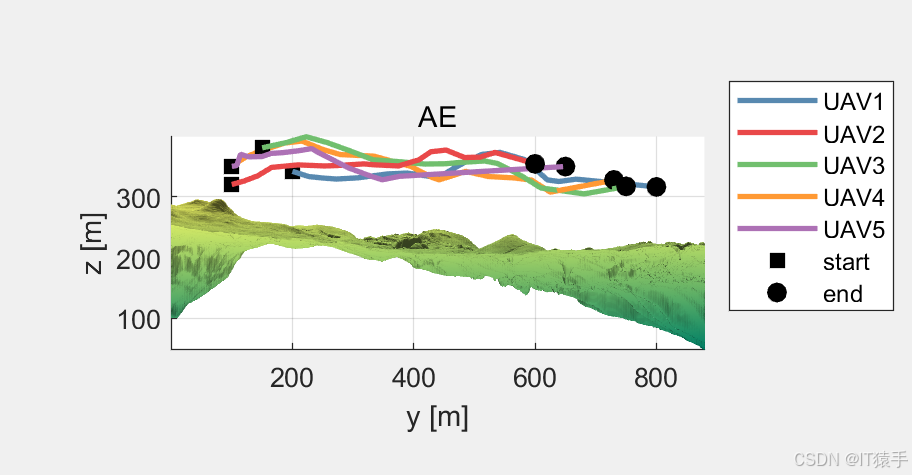
在三维无人机路径规划中,无人机的路径由起点,终点以及起始点间的点共同连接而成。因此,自变量为无人机起始点间的各点坐标,每个无人机的目标函数为总成本(公式9)。本文研究多个无人机协同路径规划,总的目标函数为多个无人机的总成本之和。
点击查看多无人机动态避障路径规划的视频演示
%% 第一个无人机 起始点
start_location = [120;200;100];
end_location = [800;800;150];
ModelUAV(1).model.start=start_location;
ModelUAV(1).model.end=end_location;
%% 第二个无人机 起始点
start_location = [400;100;100];
end_location = [900;600;150];
ModelUAV(2).model.start=start_location;
ModelUAV(2).model.end=end_location;
%% 第三个无人机 起始点
start_location = [200;150;150];
end_location =[850;750;150];
ModelUAV(3).model.start=start_location;
ModelUAV(3).model.end=end_location;
%% 第四个无人机 起始点
start_location = [100;100;150];
end_location = [800;730;150];
ModelUAV(4).model.start=start_location;
ModelUAV(4).model.end=end_location;
%% 第5个无人机 起始点
start_location = [500;100;130];
end_location = [850;650;150];
ModelUAV(5).model.start=start_location;
ModelUAV(5).model.end=end_location;
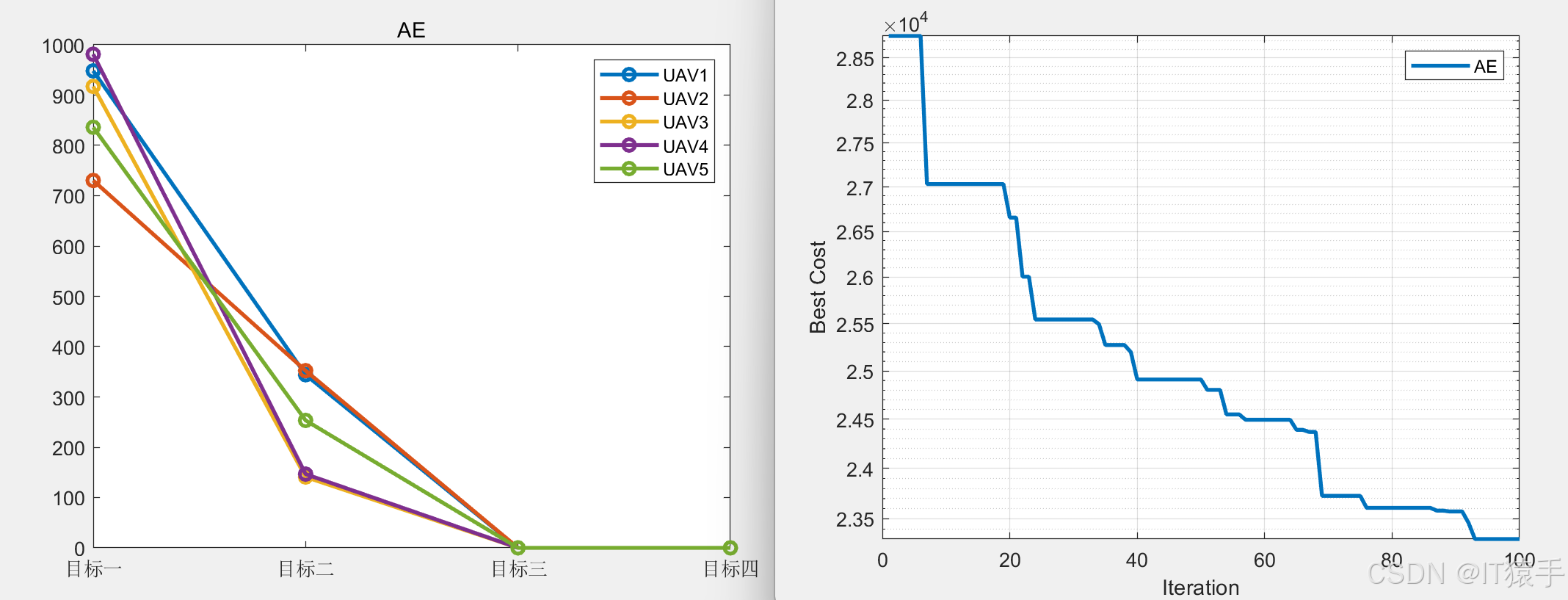
figure
plot(Convergence_curve,'LineWidth',2)
xlabel('Iteration');
ylabel('Best Cost');
grid on;
四、完整MATLAB代码见下方名片

立足具身智能前沿赛道,致力于搭建全球化、开源化、全栈式技术交流与实践共创平台。
更多推荐

 23
23 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)