【踩坑记录-2】WSL2 Ubuntu端启动gazebo+PX4仿真节点 Win端启动MAVSDK+QGC的多机编队实现方法
wsl2 ubuntu22.04+win11,只在子系统中开启px4的gzsim仿真节点,其余功能放在windows系统中完成。我在子系统里面用tkinter做了一个ui,显示效果不好(仅此而已),因此计划把编队代码和gui都放在Windows端执行。这个改动的工程意义和使用场景还不明朗,后续有时间补充。
wsl2 ubuntu22.04+win11,只在子系统中开启px4的gzsim仿真节点,其余功能放在windows系统中完成。我在子系统里面用tkinter做了一个ui,显示效果不好(仅此而已),因此计划把编队代码和gui都放在Windows端执行。这个改动的工程意义和使用场景还不明朗,后续有时间补充。
一、最小修改法
之前代码参考:Ubuntu22.04+PX4+MAVSDK+Gazebo+QGC固定翼编队仿真遇到的问题记录_ubuntu22.04 px4 ros gazebo-CSDN博客
1)Windows 侧
step1.
-------------好像不需要做任何修改,打开qgc就好了
2)WSL Ubuntu 端
【注意】实测发现,WSL2里面不需要配置这个也能直接用!!!以下操作没啥用
step1.
用 mavlink-router 转发
# WSL2 内
sudo apt update
sudo apt install -y mavlink-router我用的源里面没有这个包,因此会报错:E: Unable to locate package mavlink-router
所以我使用源码安装
# 依赖
sudo apt update
sudo apt install git meson ninja-build gcc g++ pkg-config \
libsystemd-dev python3-pip
# 旧版需要安装 autoconf-archive(如遇到构建宏缺失时再装):
# sudo apt install autoconf-archive
# 拉取与构建
git clone https://github.com/intel/mavlink-router.git
cd mavlink-router
meson setup build
ninja -C build
sudo ninja -C build install可能是我没挂梯子的原因,构建时出现
meson.build:127:0: ERROR: Include dir modules/mavlink_c_library_v2/ardupilotmega does not exist.
因此需要重新拉取子模块
git submodule sync
git submodule update --init modules/mavlink_c_library_v2
或者直接进入并把子模块拉齐
cd ~/mavlink-router
git reset --hard
git clean -fdx
git submodule sync --recursive
git submodule update --init --recursive
可自检一下是否有 ardupilotmega 这些头文件:
ls modules/* -d
ls modules/mavlink_c_library_v2/ardupilotmega 2>/dev/null | head
会显示
ardupilotmega.h
mavlink.h
mavlink_msg_adap_tuning.h
mavlink_msg_ahrs.h
mavlink_msg_ahrs2.h
mavlink_msg_ahrs3.h
mavlink_msg_airspeed_autocal.h
mavlink_msg_aoa_ssa.h
mavlink_msg_ap_adc.h
mavlink_msg_autopilot_version_request.h然后再build一下就可以了
rm -rf build
meson setup build
ninja -C build
sudo ninja -C build install
继续在命令行输入
mavlink-routerd -h显示Could not open conf file '/etc/mavlink-router/main.conf' (No such file or directory)就可以了,下一步开始配置main.conf
step2.
创建 /etc/mavlink-router/main.conf
cd /etc
sudo mkdir mavlink-router
cd mavlink-router/
sudo touch main.conf
sudo chmod 777 main.conf以 6 机为例,把 <WIN_IP> 换成你 Windows IPv4,当前正在使用的真实连外网的那个,不是 127.0.0.1 或 WSL 内部的地址,也不是VMware、VirtualBox、WSL Loopback、meta之类的虚拟网卡:
[General]
TcpServerPort=0
ReportStats=false
# --- 监听 WSL 本地的 SITL 端口(14540+i)---
[UdpEndpoint sitl_0]
Mode=Eavesdropping
Address=0.0.0.0
Port=14540
[UdpEndpoint sitl_1]
Mode=Eavesdropping
Address=0.0.0.0
Port=14541
[UdpEndpoint sitl_2]
Mode=Eavesdropping
Address=0.0.0.0
Port=14542
[UdpEndpoint sitl_3]
Mode=Eavesdropping
Address=0.0.0.0
Port=14543
[UdpEndpoint sitl_4]
Mode=Eavesdropping
Address=0.0.0.0
Port=14544
[UdpEndpoint sitl_5]
Mode=Eavesdropping
Address=0.0.0.0
Port=14545
# --- 转发到 Windows GUI 端口 ---
[UdpEndpoint win_gui_0]
Address=<WIN_IP>
Port=14540
[UdpEndpoint win_gui_1]
Address=<WIN_IP>
Port=14541
[UdpEndpoint win_gui_2]
Address=<WIN_IP>
Port=14542
[UdpEndpoint win_gui_3]
Address=<WIN_IP>
Port=14543
[UdpEndpoint win_gui_4]
Address=<WIN_IP>
Port=14544
[UdpEndpoint win_gui_5]
Address=<WIN_IP>
Port=14545
step3.
启动./start_sih.sh
#!/bin/bash
tmux new-session -d -s formation
tmux new-window -t formation -n Gazebo "python3 simgz"
# tmux new-window -t formation -n QGC "./QGroundControl-x86_64.AppImage"
for i in $(seq 0 5); do
# 启动PX4实例
pose_y=0
pose_x=$((i * 50))
pose="$pose_x,$pose_y,0,0,0,1.57079632679"
cmd="cd ~/PX4-Autopilot && \
PX4_GZ_STANDALONE=1 \
PX4_GZ_MODEL_POSE=$pose \
PX4_SYS_AUTOSTART=4003 \
PX4_SIM_MODEL=gz_rc_cessna \
./build/px4_sitl_default/bin/px4 -i $i "
tmux new-window -t formation -n PX4_$i "$cmd"
done
tmux attach -t formation
原则上来说,应该要先启动mavlink_routerd服务,不知道为啥我这直接启动了
sudo systemctl enable --now mavlink-routerd然后无人机就自动连到windows的地面站了
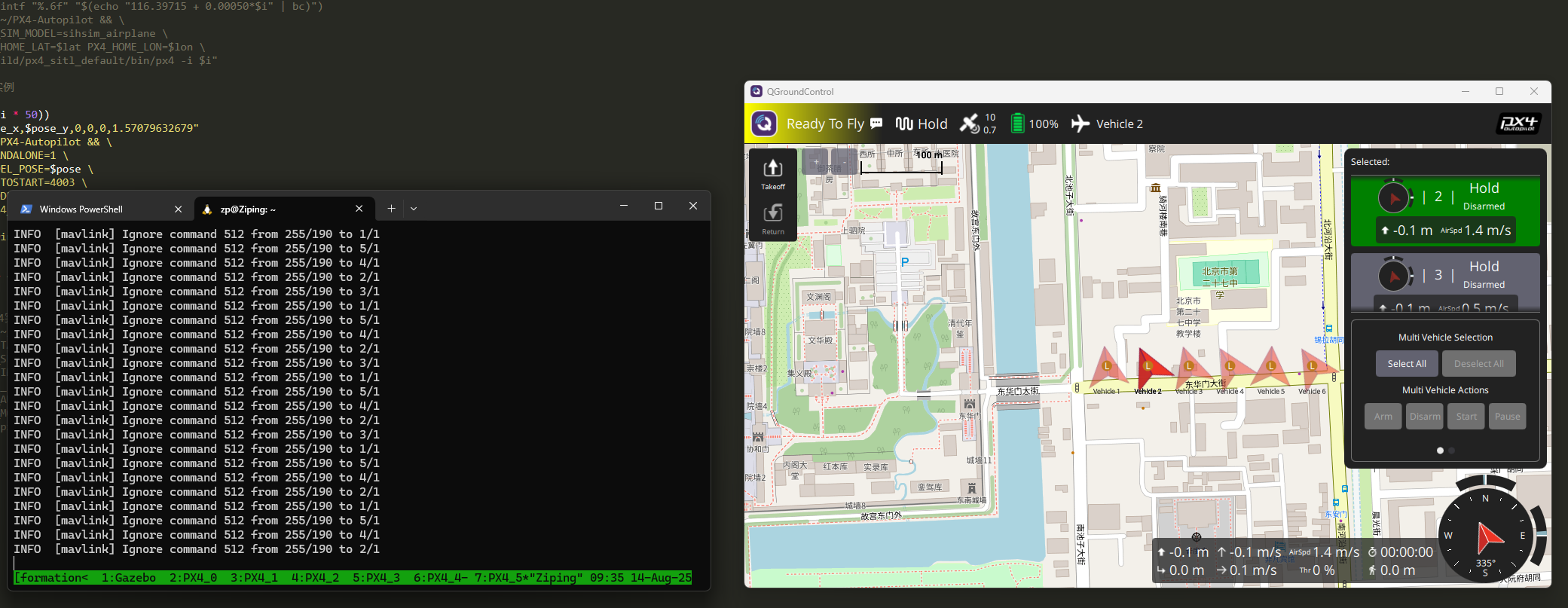
之后在windows端直接执行formationMain那三个代码就可以啦
二、直接让 PX4 指向 Windows
这个要改PX4 的 mavlink 启动项,等做24机编队的时候再改
三、编队代码(无GUI)
gui版本等做好了我再补充,下面这些还是基于在cmd扣字的编队方法,当然用了gui原理也是一样,我会做一个独立的gui,用local socket和编队代码交互,其实就是用点击按钮代替了扣字而已
加入了队形变换功能。
#!/usr/bin/env python3
"""
formationMain.py
"""
import asyncio, math, random
from mavsdk import System
from dronesConfig import UAV_CFGS, connect_uav, set_speed
from dronesBehavior import rtl_all, land_all, takeoff_all
from dronesBehavior import leader_task, follower_task, TRAIL_DIST # 新增:引入默认间距
HOME_LAT = 39.91401032678762
HOME_LON = 116.39717200165842
async def keyboard_listen(tasks, drones:System, home_lat, home_lon):
"""
监听键盘输入,处理命令
"""
# 新增:共享状态(航向、编队类型与间距)
dir_ref = {"hdg": 0.0}
form_ref = {"type": 1, "spacing": TRAIL_DIST} # 1=三角;2=横向一字;3=纵向一字
while True:
cmd = await asyncio.to_thread(input, ">> ")
s = cmd.strip().lower()
if s == "takeoff":
for t in tasks: t.cancel()
await asyncio.gather(*tasks, return_exceptions=True)
tasks.clear()
await takeoff_all(drones)
elif s == "rtl":
for t in tasks: t.cancel()
await asyncio.gather(*tasks, return_exceptions=True)
tasks.clear()
await rtl_all(drones)
elif s == "land":
for t in tasks: t.cancel()
await asyncio.gather(*tasks, return_exceptions=True)
tasks.clear()
await land_all(drones)
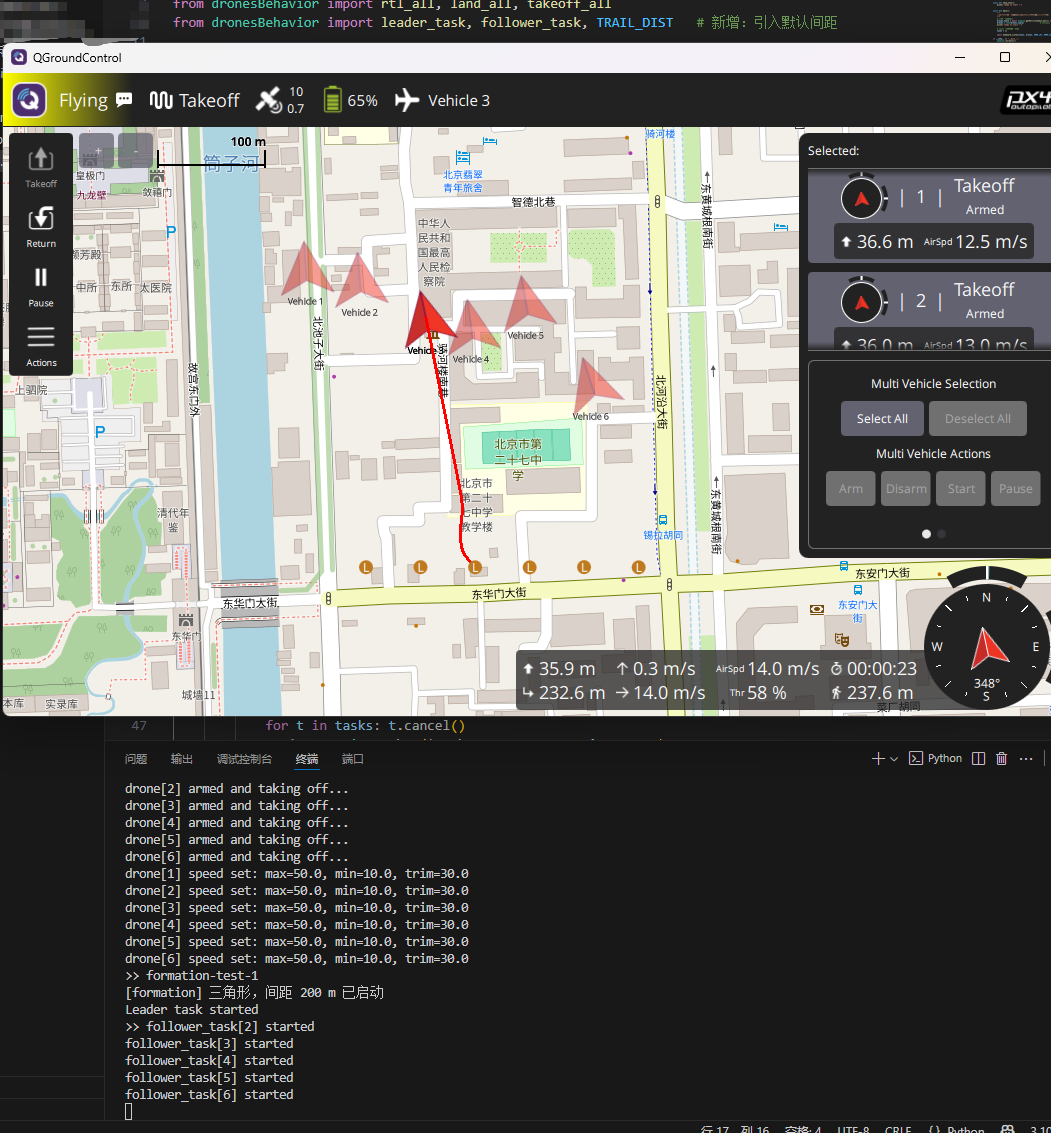
elif s == "formation-test-1":
# 启动领机/僚机任务(默认三角形,间距=TRAIL_DIST)
for t in tasks: t.cancel()
await asyncio.gather(*tasks, return_exceptions=True)
tasks.clear()
tasks.append(asyncio.create_task(
leader_task(drones[0], home_lat, home_lon, dir_ref)
))
for i in range(1, len(drones)):
tasks.append(asyncio.create_task(
follower_task(drones[i], drones[0], dir_ref, form_ref, i)
))
print(f"[formation] 三角形,间距 {form_ref['spacing']} m 已启动")
else:
# 新增:解析 (类型,间距),兼容中文全角符号
norm = s.replace('(','(').replace(')',')').replace(',',',').replace(' ', '')
if norm.startswith('(') and norm.endswith(')') and ',' in norm:
try:
a, b = norm[1:-1].split(',', 1)
ftype = int(a)
spacing = float(b)
if ftype in (1,2,3) and spacing > 0:
form_ref["type"] = ftype
form_ref["spacing"] = spacing
name = {1:"三角形", 2:"横向一字", 3:"纵向一字"}[ftype]
print(f"[formation] 切换为 {name},间距 {spacing} m")
else:
print("参数错误:类型须为1/2/3,间距>0")
except Exception:
print("格式应为 (类型,间距),例如 (1,500)")
# 其它输入不处理
continue
async def task_init():
print('ready to start !')
async def main():
"""
主协程,连接所有无人机,起飞,启动领机跟随任务(测试)
"""
# 连接所有无人机
drones_tuple = await asyncio.gather(*(connect_uav(c) for c in UAV_CFGS))
drones = list(drones_tuple) # 序保持与 UAV_CFGS 对应
print('ready to start !')
# tasks 用列表统一管理
tasks = []
await keyboard_listen(tasks, drones, HOME_LAT, HOME_LON)
if __name__ == "__main__":
asyncio.run(main())
#!/usr/bin/env python3
"""
dronesBehavior.py
"""
import asyncio
import math
import random
from mavsdk import System
from dronesConfig import calculate_new_coordinates, calculate_positions_distance, calculate_relative_distance
from dronesConfig import set_speed
# ========== 飞行参数 ==========
ALT_TKOF = 50.0
LEG_DIST = 1500*2
TRAIL_DIST = 200 # 默认间距(仍保留,作为初始值)
HOME_R = 200
REACH_R = 200
CHECK_INT = 1.0
SQRT3_2 = math.sqrt(3) / 2
# ========== 编队偏移计算(新增的极小函数) ==========
def get_offset(i: int, form_type: int, s: float):
"""
返回僚机 i 在领机机体系下的 (dx_body, dy_body)
form_type: 1=三角形;2=横向一字;3=纵向一字
s: 编队间距(米)
"""
if form_type == 1:
# 等边三角(与原 _OFFSETS_BODY 保持几何一致,只是把 TRAIL_DIST 改为 s)
mapping = {
1: (-s*SQRT3_2, -0.5*s),
2: (-s*SQRT3_2, 0.5*s),
3: (-2*s*SQRT3_2, 0.0),
4: (-2*s*SQRT3_2, -1.0*s),
5: (-2*s*SQRT3_2, 1.0*s),
}
return mapping.get(i, (0.0, 0.0))
if form_type == 2:
# 横向一字:整体略微后移,左右铺开
mapping = {
1: (-0.5*s, -2.0*s),
2: (-0.5*s, -1.0*s),
3: (-0.5*s, 0.0*s),
4: (-0.5*s, 1.0*s),
5: (-0.5*s, 2.0*s),
}
return mapping.get(i, (0.0, 0.0))
if form_type == 3:
# 纵向一字:顺航向依次排开
mapping = {
1: (-1.0*s, 0.0),
2: (-2.0*s, 0.0),
3: (-3.0*s, 0.0),
4: (-4.0*s, 0.0),
5: (-5.0*s, 0.0),
}
return mapping.get(i, (0.0, 0.0))
return (0.0, 0.0)
# ========== 飞行逻辑(新版) ==========
async def leader_task(lead:System, start_lat, start_lon, dir_ref):
"""
起飞后首先向正北飞行一个航段(LEG_DIST),
之后每段在当前航向上随机偏转 -60°…+60° 并继续前行。
dir_ref["hdg"] 实时存储领机航向(真方位角,0°=北,顺时针为正)。
"""
cur_lat, cur_lon = start_lat, start_lon
heading = 0.0
print("Leader task started")
while True:
rad = math.radians(heading)
n_off = LEG_DIST * math.cos(rad)
e_off = LEG_DIST * math.sin(rad)
tgt_lat, tgt_lon = calculate_new_coordinates(cur_lat, cur_lon, n_off, e_off)
await lead.action.goto_location(tgt_lat, tgt_lon, ALT_TKOF,0)
lead_true_heading = await lead.telemetry.heading().__anext__()
dir_ref["hdg"] = round(lead_true_heading.heading_deg)
while True:
lead_true_heading = await lead.telemetry.heading().__anext__()
pos = await lead.telemetry.position().__anext__()
dir_ref["hdg"] = round(lead_true_heading.heading_deg)
if calculate_positions_distance(pos.latitude_deg, pos.longitude_deg, tgt_lat, tgt_lon) <= REACH_R:
break
await asyncio.sleep(0.5)
await asyncio.sleep(0.5)
cur_lat, cur_lon = tgt_lat, tgt_lon
heading = (heading + random.uniform(-90.0, 90.0)) % 360.0
async def follower_task(fol:System, lead:System, dir_ref, form_ref, i):
"""
僚机保持指定编队(form_ref["type"])与间距(form_ref["spacing"])。
所有计算均随领机实时航向旋转。
"""
temp_delta = 300.0 # “无穷远”延伸量,用于保证 goto 的航向一致
print(f"follower_task[{i+1}] started")
while True:
# 读取共享的编队形态与间距(可被键盘命令实时更新)
spacing = float(form_ref.get("spacing", TRAIL_DIST))
form_type = int(form_ref.get("type", 1))
# 读取领机状态
pos_lead = await lead.telemetry.position().__anext__()
lead_true_heading = await lead.telemetry.heading().__anext__()
pos_true_heading = await fol.telemetry.heading().__anext__()
dir_ref["hdg"] = round(lead_true_heading.heading_deg)
hdg = dir_ref["hdg"]
rad = math.radians(hdg)
# 当前形态下的机体系偏移
dx_body, dy_body = get_offset(i, form_type, spacing)
# 将机体坐标系偏移量旋转到地理坐标系 (北、东)
n_off = dx_body * math.cos(rad) - dy_body * math.sin(rad)
e_off = dx_body * math.sin(rad) + dy_body * math.cos(rad)
# 期望位置及沿航向的“远点”坐标
tgt_lat, tgt_lon = calculate_new_coordinates(pos_lead.latitude_deg, pos_lead.longitude_deg, n_off, e_off)
n_inf = n_off + (spacing + temp_delta) * math.cos(rad)
e_inf = e_off + (spacing + temp_delta) * math.sin(rad)
tgt_lat_inf, tgt_lon_inf = calculate_new_coordinates(pos_lead.latitude_deg, pos_lead.longitude_deg, n_inf, e_inf)
# 导航至“远点”,PX4 自动插值
await fol.action.goto_location(tgt_lat_inf, tgt_lon_inf, ALT_TKOF,0)
# 依据沿航向误差调整空速
pos_fol = await fol.telemetry.position().__anext__()
dn, de = calculate_relative_distance(pos_fol.latitude_deg, pos_fol.longitude_deg, tgt_lat, tgt_lon)
s = dn * math.cos(rad) + de * math.sin(rad) # 正值表示超前
d = -dn * math.sin(rad) + de * math.cos(rad) # 横向误差
sign_s = 1 if s > 0 else -1
tgt_spd = 30.0 - (1/5)*s - (1e-4)*(d**2)*sign_s
tgt_spd = max(10.0, min(50.0, tgt_spd))
await fol.param.set_param_float("FW_AIRSPD_TRIM", round(tgt_spd, 1))
await asyncio.sleep(CHECK_INT)
# 起飞/返航/降落(无改动)
async def takeoff_all(drone:System):
for i, d in enumerate(drone):
await d.action.arm()
await asyncio.sleep(0.5)
await d.action.takeoff()
await asyncio.sleep(1)
print(f"drone[{i+1}] armed and taking off...")
await asyncio.sleep(1)
for i, d in enumerate(drone):
await set_speed(d)
smax = await d.param.get_param_float("FW_AIRSPD_MAX",)
smin = await d.param.get_param_float("FW_AIRSPD_MIN")
scur = await d.param.get_param_float("FW_AIRSPD_TRIM")
print(f"drone[{i+1}] speed set: max={smax}, min={smin}, trim={scur}")
await asyncio.sleep(0.5)
async def rtl_all(drones:System):
await asyncio.gather(*(d.param.set_param_float("FW_AIRSPD_TRIM", 40) for d in drones))
await asyncio.gather(*(d.action.return_to_launch() for d in drones))
async def land_all(drones:System):
await asyncio.gather(*(d.action.land() for d in drones))
#!/usr/bin/env python3
"""
dronesConfig.py
"""
import asyncio, math, random
from mavsdk import System
from geopy import Point, distance
from geopy.distance import geodesic, great_circle
from math import radians, cos
# ========== 机队配置==========
UAV_CFGS = [
{"tag": "LEAD", "ctl": 14540, "grpc": 50051, "system_address": "udp://0.0.0.0:14540"}, # 领机
{"tag": "DRONE1", "ctl": 14541, "grpc": 50052, "system_address": "udp://0.0.0.0:14541"}, # 僚机 1
{"tag": "DRONE2", "ctl": 14542, "grpc": 50053, "system_address": "udp://0.0.0.0:14542"}, # 僚机 2
{"tag": "DRONE3", "ctl": 14543, "grpc": 50054, "system_address": "udp://0.0.0.0:14543"}, # 僚机 3
{"tag": "DRONE4", "ctl": 14544, "grpc": 50055, "system_address": "udp://0.0.0.0:14544"}, # 僚机 4
{"tag": "DRONE5", "ctl": 14545, "grpc": 50056, "system_address": "udp://0.0.0.0:14545"}, # 僚机 5
# …继续追加 {"tag": "DRONE3", ...}
] # 要和仿真启动的数量一致,才发现system_address没用上,懒得删了
async def set_speed(drone:System):
"""设置无人机速度/加速度等,参数不对的话在这里调"""
param = drone.param
await param.set_param_float("FW_AIRSPD_MAX", 50.0) # 空速
await param.set_param_float("FW_AIRSPD_TRIM", 30.0) # 巡航基准
await param.set_param_float("FW_AIRSPD_MIN", 10.0) # 最小空速,同步安全下限(默认7会STALL)
# await param.set_param_float("FW_THR_MAX", 1.0) # 推力最大值,若推力不足,可放到 1 (=100 %)
await param.set_param_float("FW_THR_SLEW_MAX", 1) # 油门变化速度,值越大,油门跃迁越快
await param.set_param_float("RTL_RETURN_ALT", 50) # 返航高度
await param.set_param_float("FW_T_SPDWEIGHT", 2.0) # 0.0=高度绝对优先,2.0=速度绝对优先
await param.set_param_float("FW_P_LIM_MAX",45.0) # 俯仰角最大值,单位度
await param.set_param_float("FW_P_LIM_MIN",-45.0) # 俯仰角最小值,单位度
# await param.set_param_float("TECS_TIME_CONST", 3.0) # TECS更灵敏,默认 5s,太低会震荡
# ========== 通讯连接 ==========
async def connect_uav(cfg):
drone = System(port=cfg["grpc"])
await drone.connect(system_address=f"udp://:{cfg['ctl']}")
async for h in drone.telemetry.health():
if h.is_global_position_ok and h.is_home_position_ok:
break
return drone
# ========== 经纬换算 ==========
# 将距离转换为纬度lat和经度lon(替换原函数offset)
def calculate_new_coordinates(lat, lon, north_m, east_m):
"""
支持正北/正南、正东/正西四象限位移:
- north_m >0 向北,<0 向南
- east_m >0 向东,<0 向西
"""
origin = Point(lat, lon)
# 先沿南北方向
if north_m:
bearing_ns = 0 if north_m > 0 else 180
origin = geodesic(meters=abs(north_m)).destination(origin, bearing_ns)
# 再沿东西方向
if east_m:
bearing_ew = 90 if east_m > 0 else 270
origin = geodesic(meters=abs(east_m)).destination(origin, bearing_ew)
return round(origin.latitude, 7), round(origin.longitude, 7)
# 计算两个纬度lat和经度lon距离(替换原函数dist_m)
def calculate_positions_distance(x1, y1, x2, y2):
return distance.distance((x1, y1), (x2, y2)).m
# 计算目标点相对于基准点的东西南北距离
def calculate_relative_distance(lat, lon, ref_lat, ref_lon, earth_radius=6378137.0):
"""
计算坐标点 (lat, lon) 相对于参考点 (ref_lat, ref_lon) 的
向北距离 north 和向东距离 east。
参数
----
lat, lon : 目标点的纬度、经度 (度)
ref_lat, ref_lon: 参考点的纬度、经度 (度)
earth_radius : 地球半径 (米),默认值为 6378137.0 米
返回
----
north : float 向北位移,单位 m;北为正,南为负
east : float 向东位移,单位 m;东为正,西为负
"""
# 经纬度差换算成弧度
d_lat = radians(lat - ref_lat)
d_lon = radians(lon - ref_lon)
# 参考纬度(或两点纬度平均)转弧度,用于计算东西向缩放
mean_lat = radians((lat + ref_lat) / 2.0)
# 向北、向东位移
north = d_lat * earth_radius
east = d_lon * earth_radius * cos(mean_lat)
return north, east
if __name__ == "__main__":
# 基准点 (纬度, 经度)
base_point = (40.7128, -74.0060) # 纽约
# 目标点 (纬度, 经度)
target_point = (40.6130, -75.0058) # 纽约附近某点
n,e = calculate_relative_distance(*target_point, *base_point) # 前面减后面
print(n,e)

立足具身智能前沿赛道,致力于搭建全球化、开源化、全栈式技术交流与实践共创平台。
更多推荐

 15
15 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)