CCF泛在操作系统开放社区:具身智能操作系统技术白皮书 2026
EAIOS 可广泛应用于酒店服务、楼宇 / 园区 / 工厂巡检、仓内物流、智能工业装配、移动操作、养老 / 助残 / 康复护理等场景,针对各场景的工程痛点,通过软硬件解耦、技能复用、安全闭环、智能调度等能力,优化任务执行效率、降低部署成本、提升系统鲁棒性和安全性。生态核心角色:由硬件厂商(提供标准化原语)、服务开发者(封装算法为标准化服务)、技能开发者(构建可复用技能)、模型开发者(将智能模型封装
这份由 CCF 泛在操作系统开放社区 2026 年发布的《具身智能操作系统技术白皮书》,聚焦具身智能产业发展的核心痛点,提出了具身智能操作系统 EAIOS 的完整设计体系,同时明确了硬件适配方向、生态构建思路及落地路线,为具身智能迈向万亿级产业提供了共性基础设施解决方案,核心总结如下。
一、产业背景与核心痛点
产业潜力:具身智能是新一轮科技革命制高点,全球市场规模 2035 年预计达 4000 亿美元,中国 2035 年有望突破万亿元,我国已跻身全球第一梯队,政策、产业、人才布局全面推进。
核心困境:当前具身智能处于 “前操作系统时代”,软硬件高度紧耦合,导致硬件难适配、软件难复用,开发模式呈 “作坊式”,定制化成本高、效率低,缺乏支撑产业生态的共性关键基础设施。
借鉴意义:计算机、移动互联网产业的爆发均依托操作系统实现软硬件解耦,具身智能产业亟需同类基础设施突破发展瓶颈。
二、具身智能系统技术现状
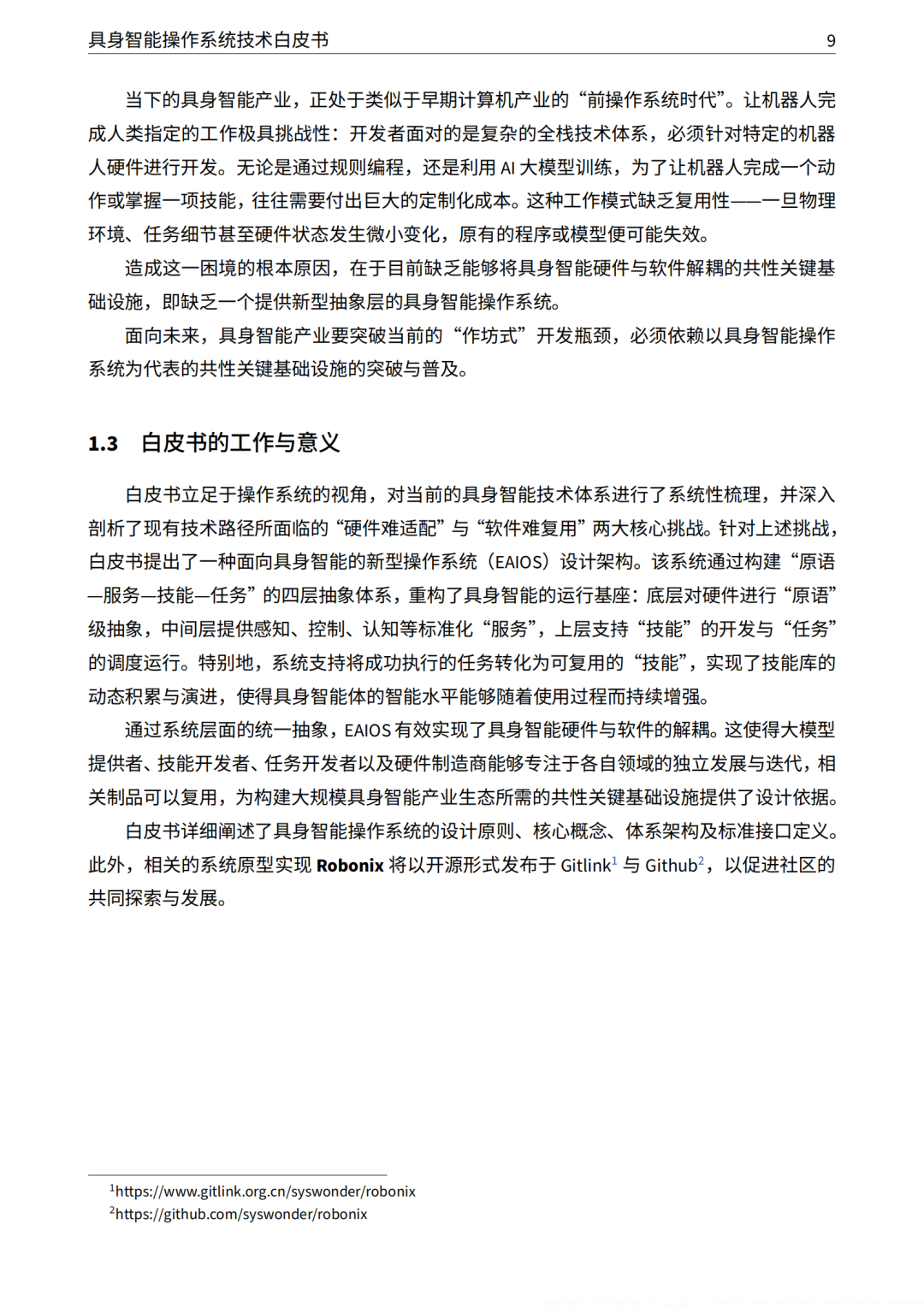
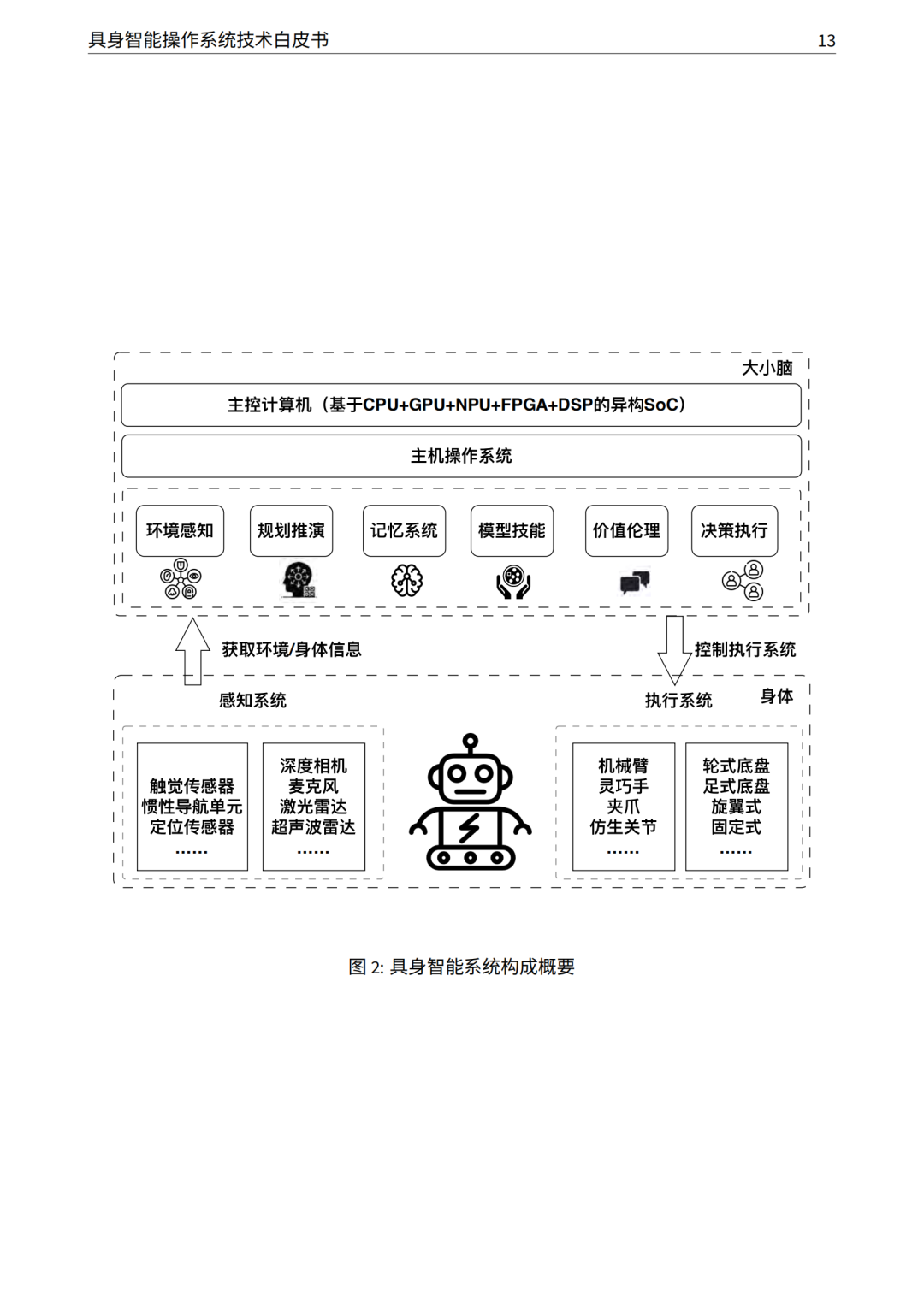
核心定义:具身智能是拥有物理 “身体” 和 AI “大脑”、能与物理环境交互完成复杂任务的智能系统,区别于纯软件离身智能和传统固定动作工业机器人,核心依赖 “感知 — 规划决策 — 执行” 闭环。
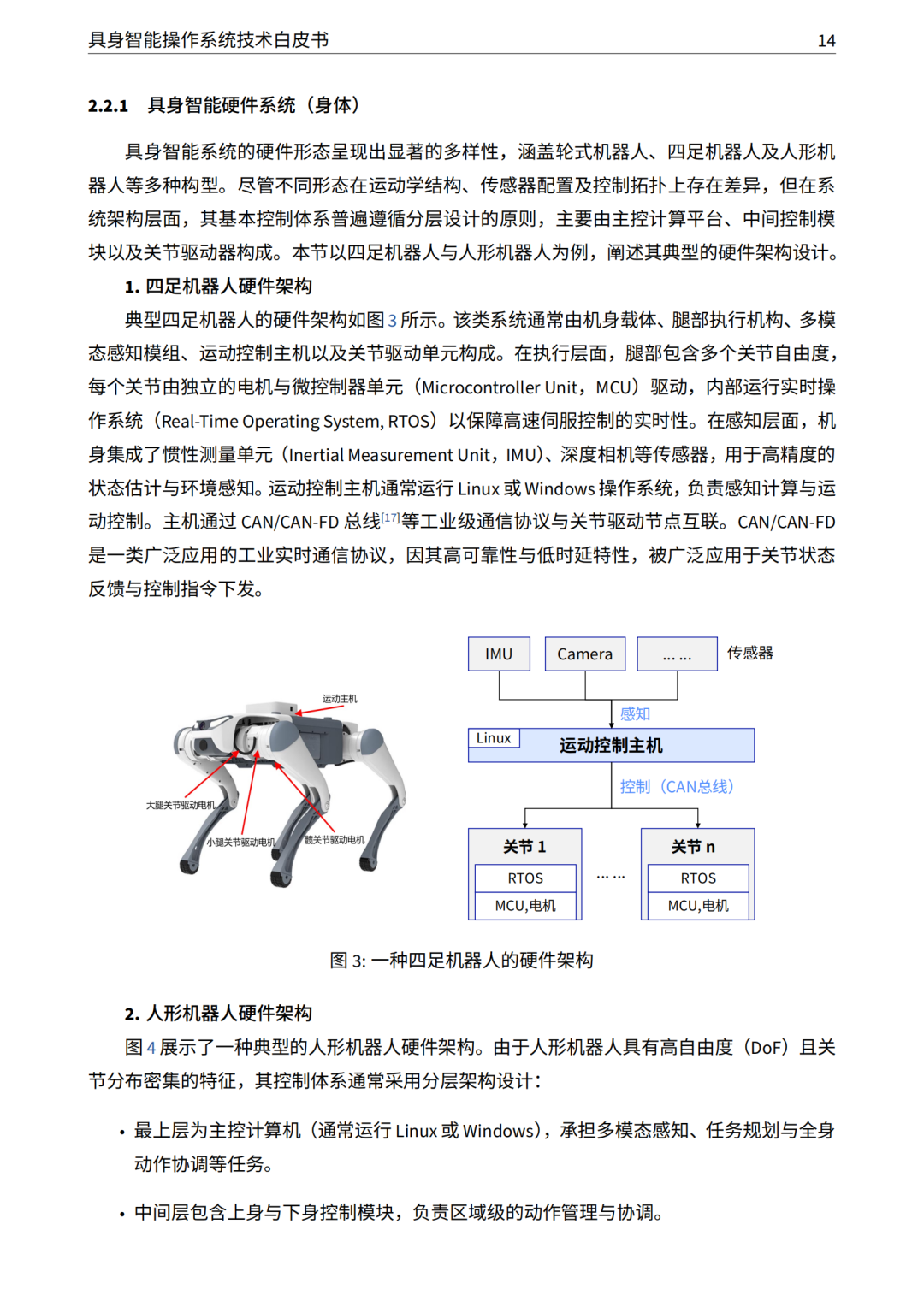
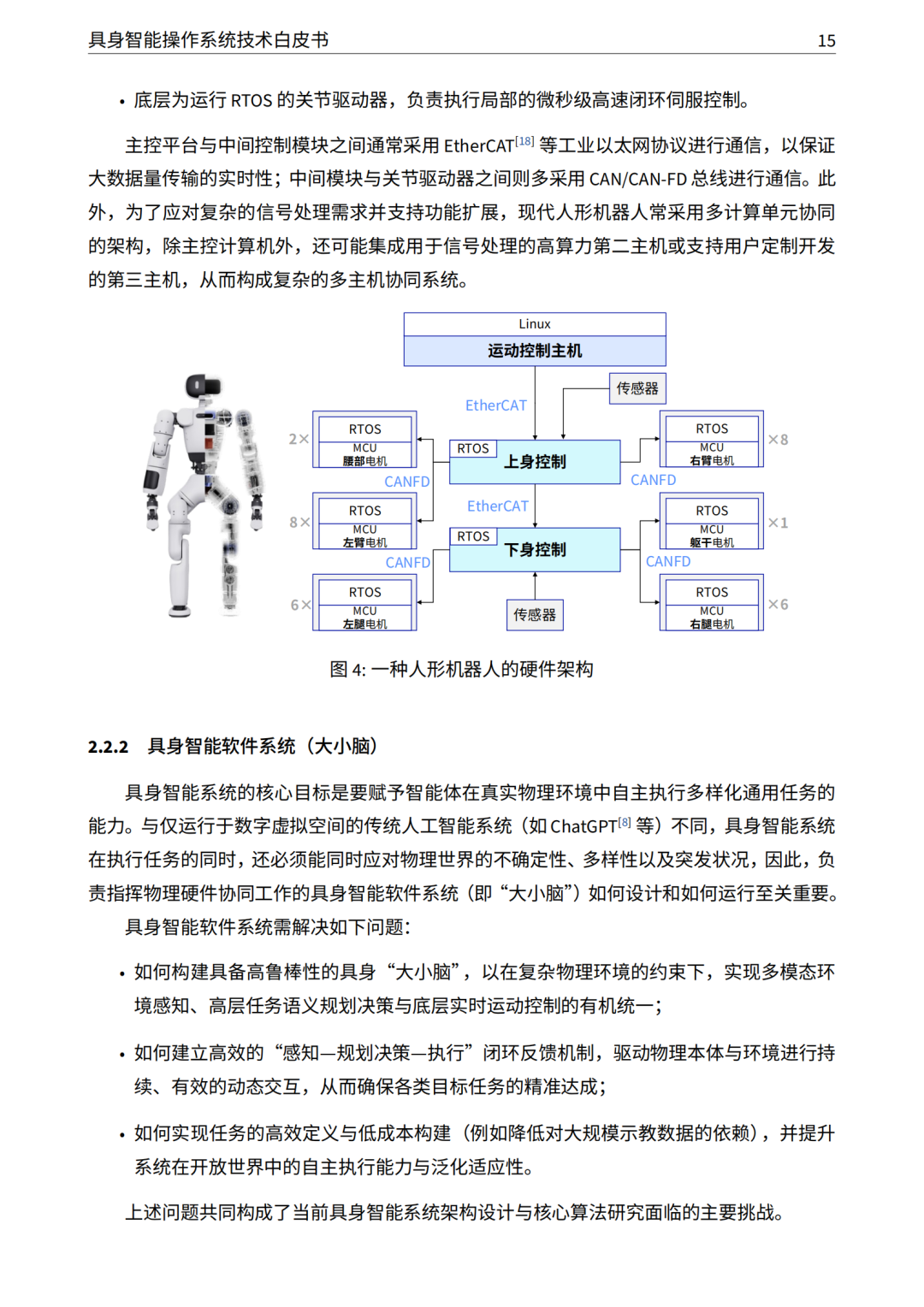
系统构成:分为硬件系统(身体,含传感器、运动控制器、移动底盘等,典型构型为四足 / 人形机器人)和软件系统(大小脑,含机器人中间件、智能模型等)。
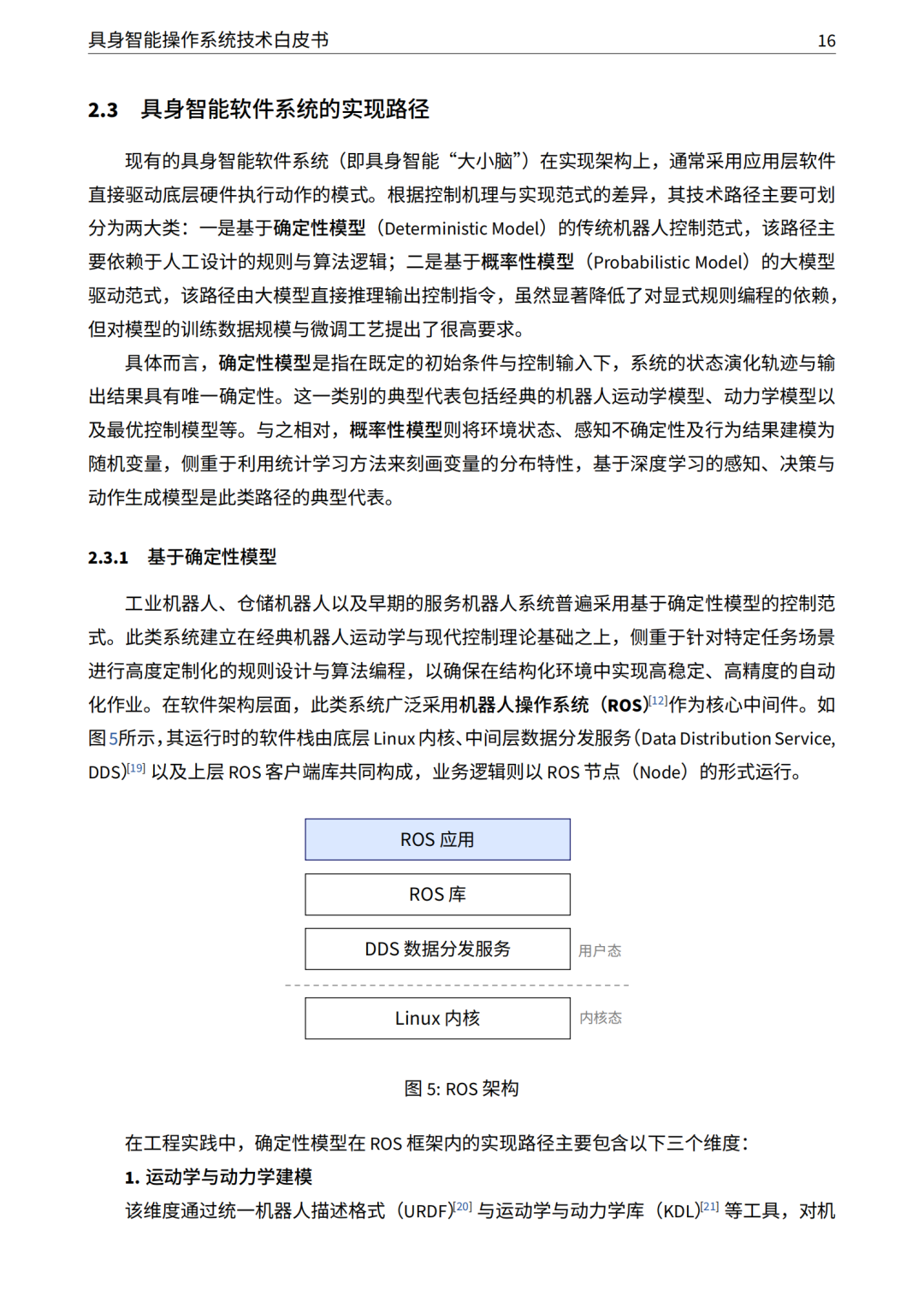
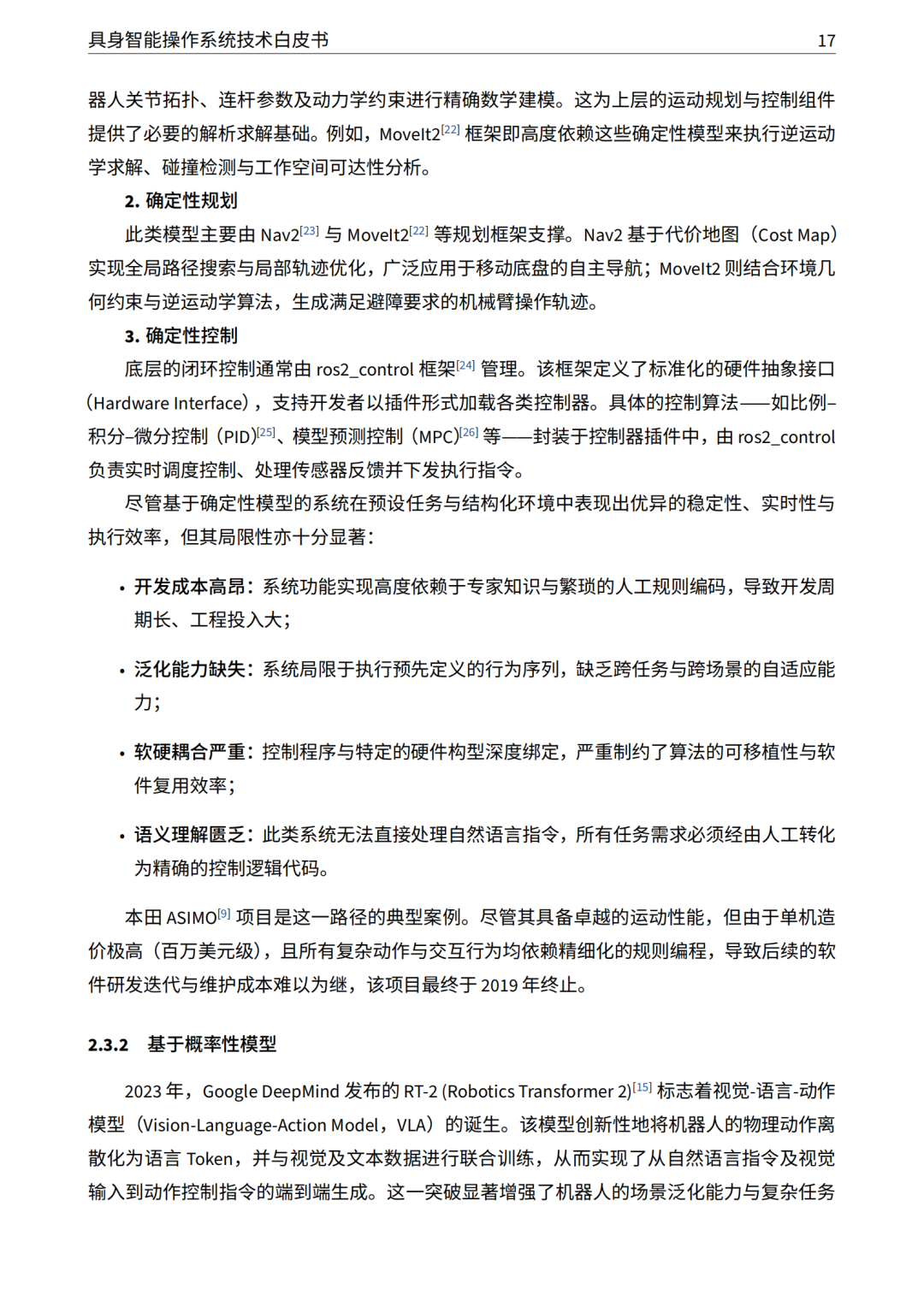
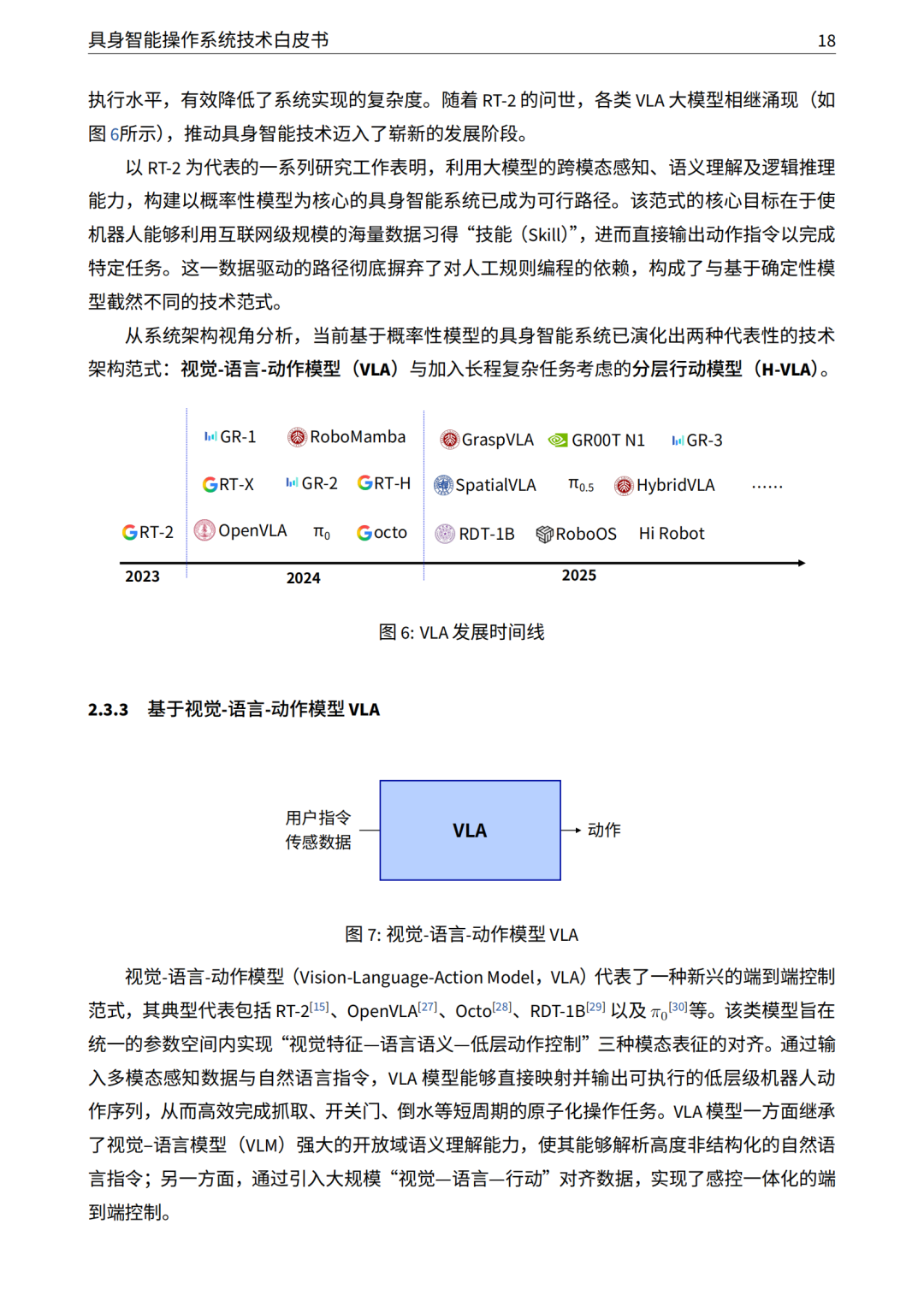
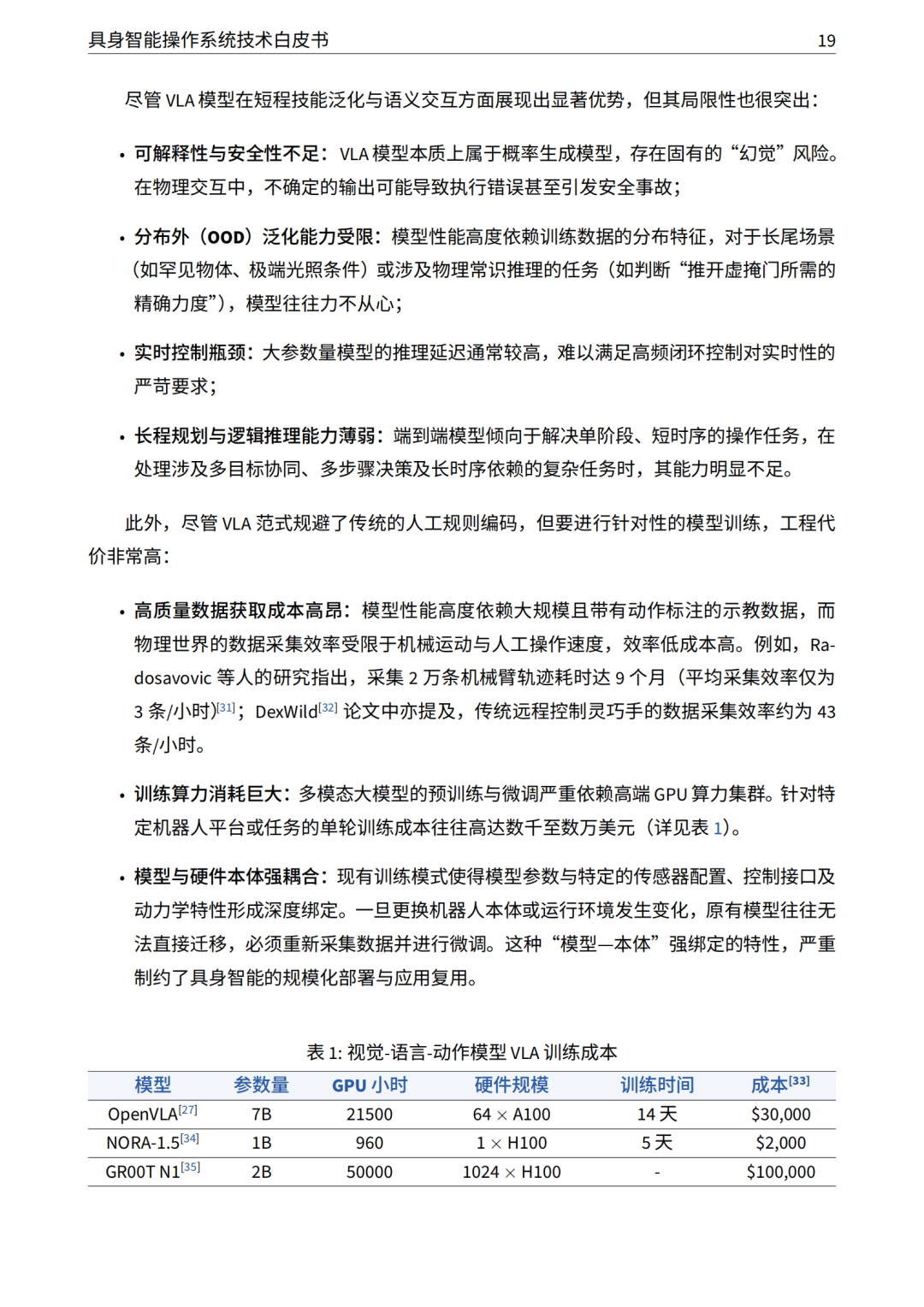
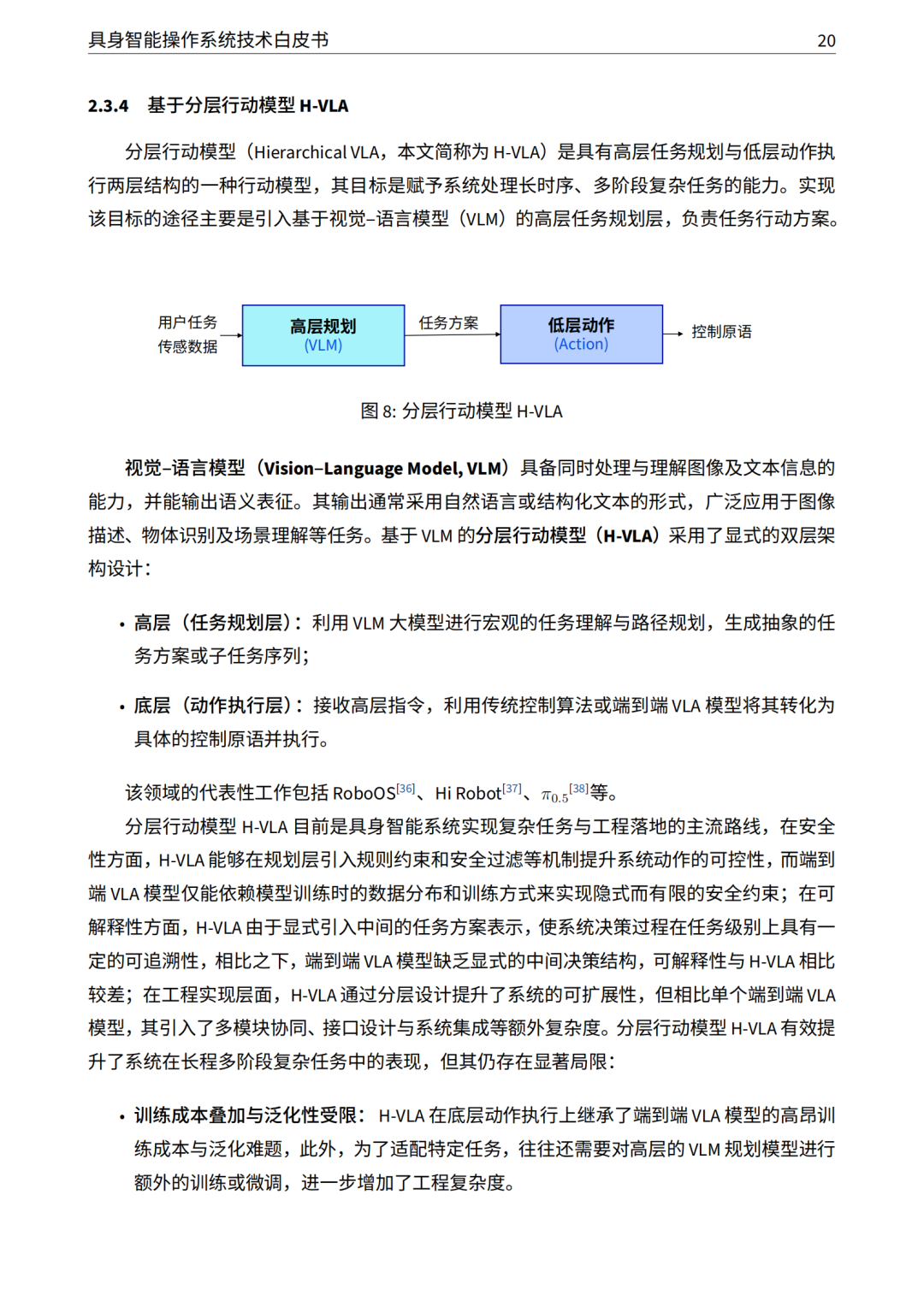
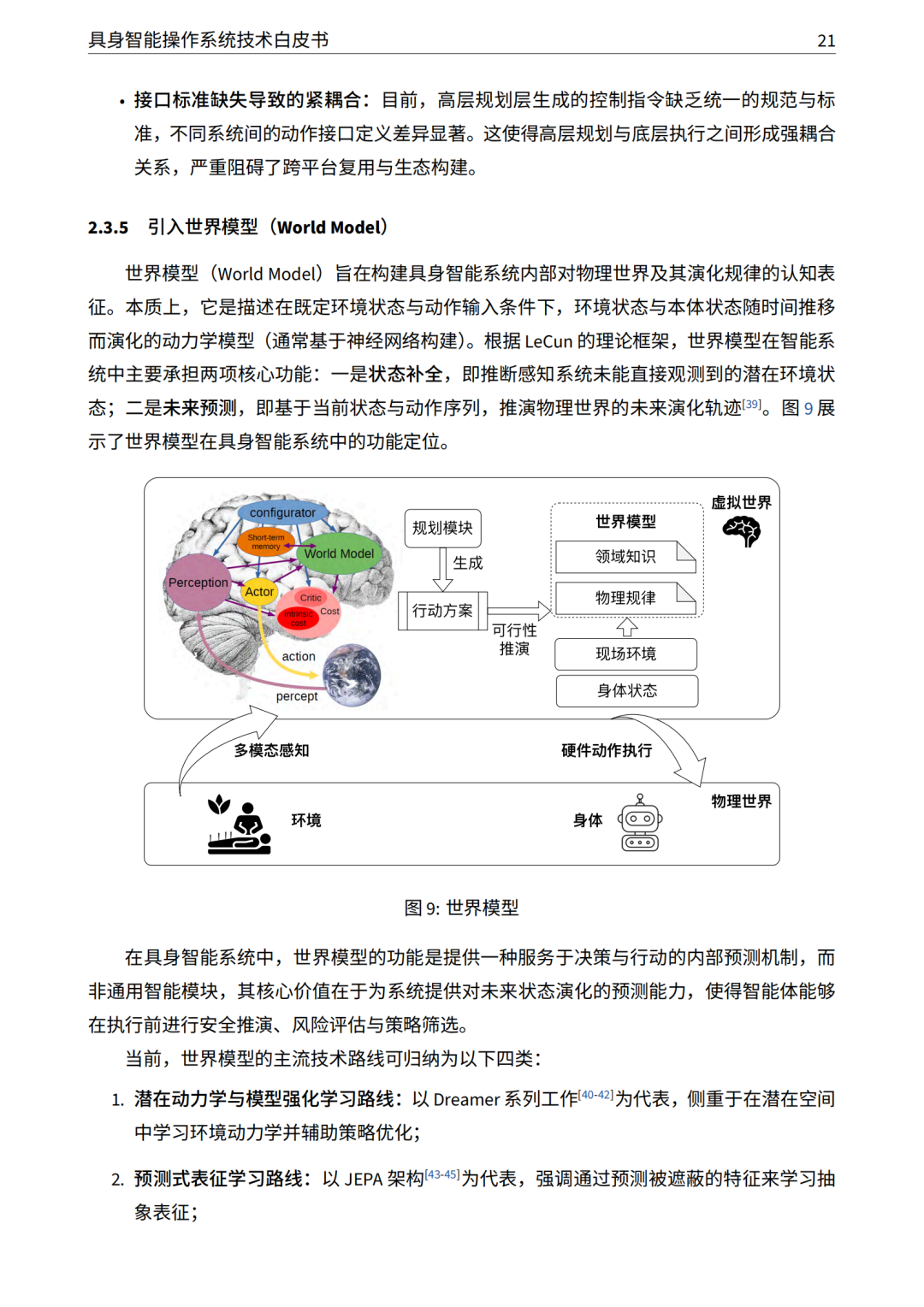
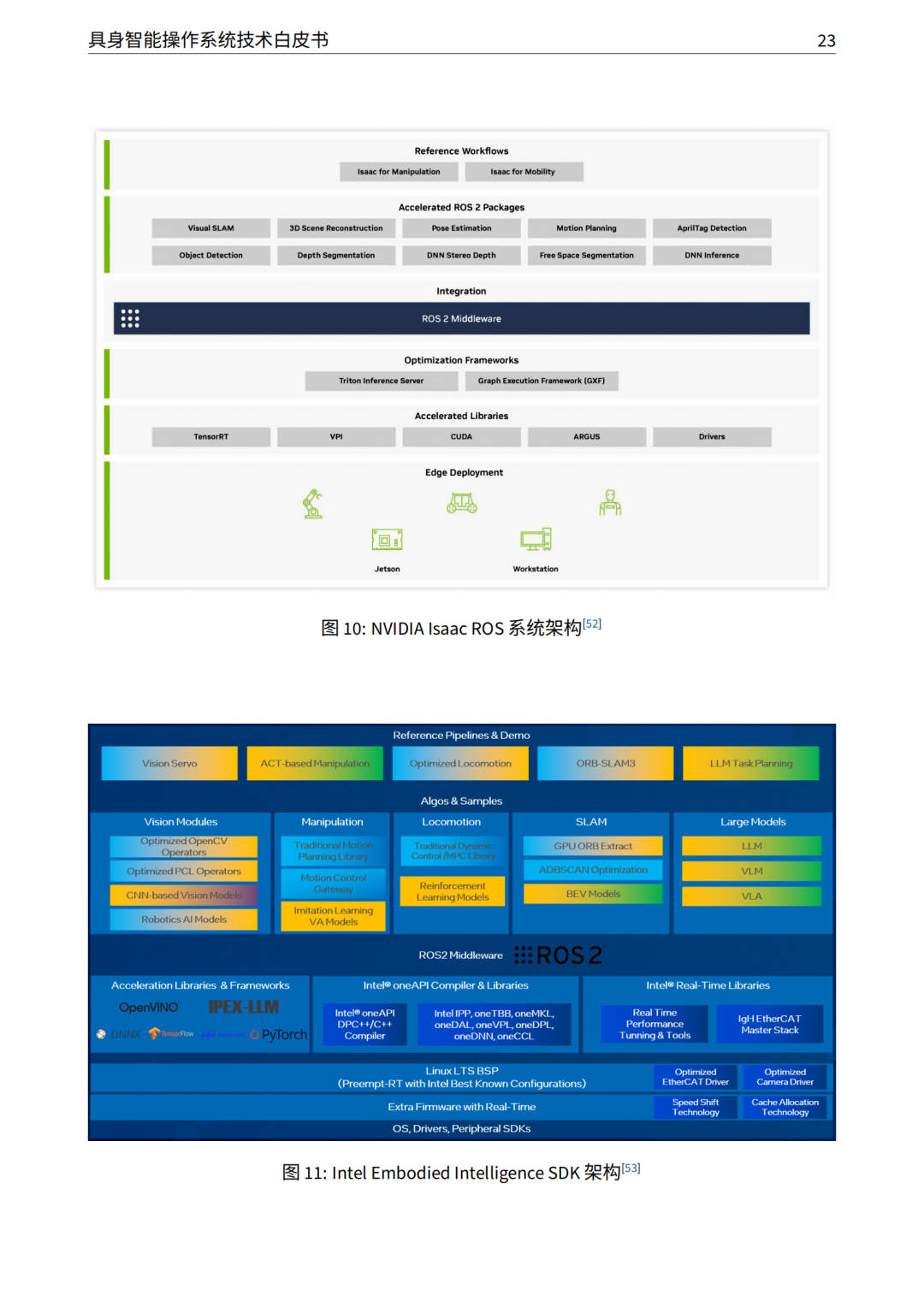
软件实现路径:主要包括基于确定性模型的传统控制范式(如 ROS,依赖人工规则,泛化能力差)、基于概率性模型的大模型驱动范式(含 VLA 端到端模型、H-VLA 分层模型,泛化性提升但训练成本高、软硬件耦合仍严重),且引入世界模型成为重要发展方向,但目前仍处于早期探索阶段。
现有软件局限:主流方案多为工具集整合,缺乏跨平台通用架构,难以解决软硬件解耦、安全验证、多任务调度等系统性问题,无法支撑规模化落地。
三、具身智能操作系统(EAIOS)核心设计
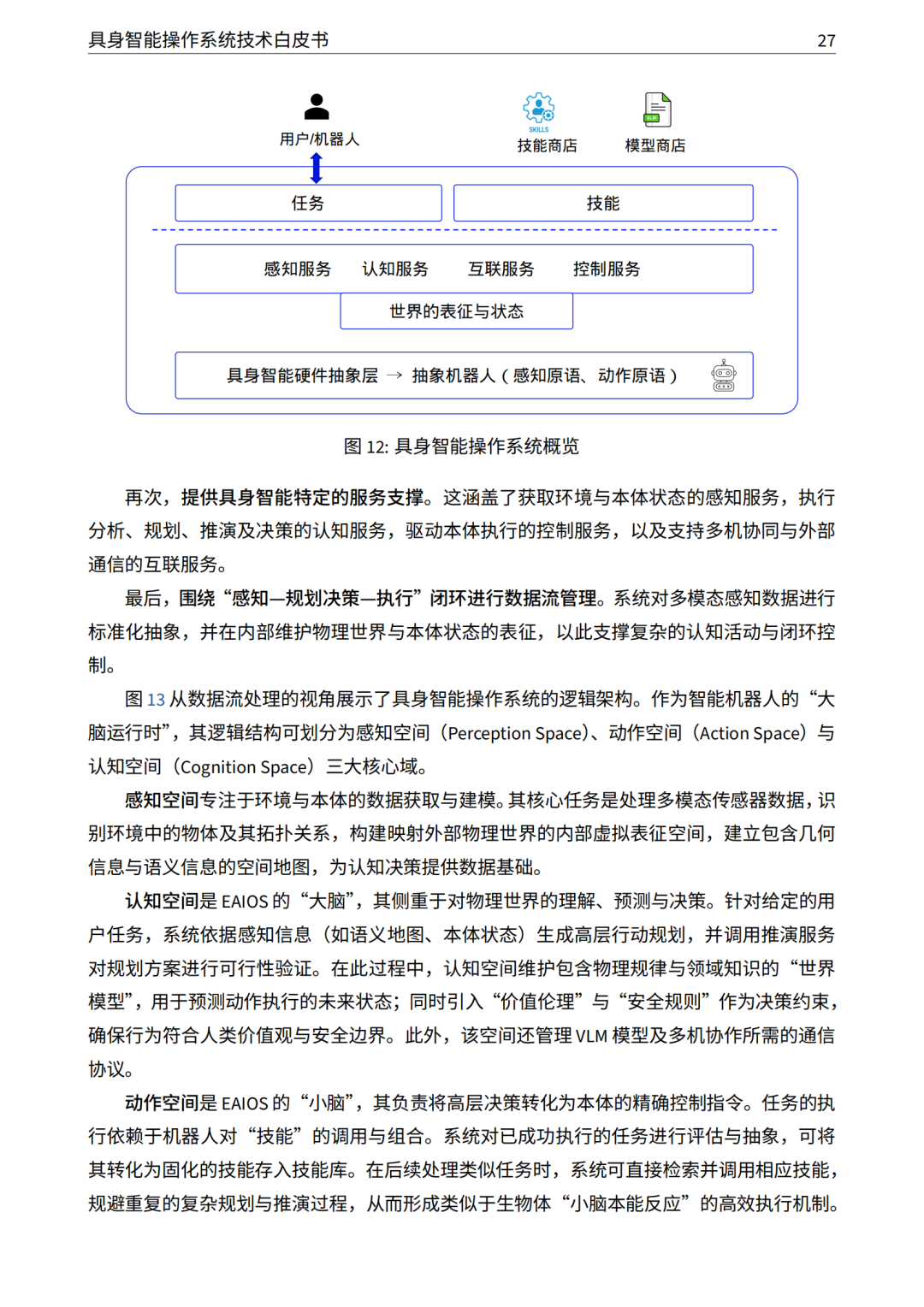
定义与设计目标:EAIOS 是统一具身智能硬件抽象、定义标准化行动接口、提供感知 / 规划 / 决策 / 控制等运行时服务的系统软件,核心目标是实现软硬件解耦,构建产业生态共性基础设施,需满足异构硬件屏蔽、标准化运行时支撑、规划与执行解耦、动态安全保障四大要求。
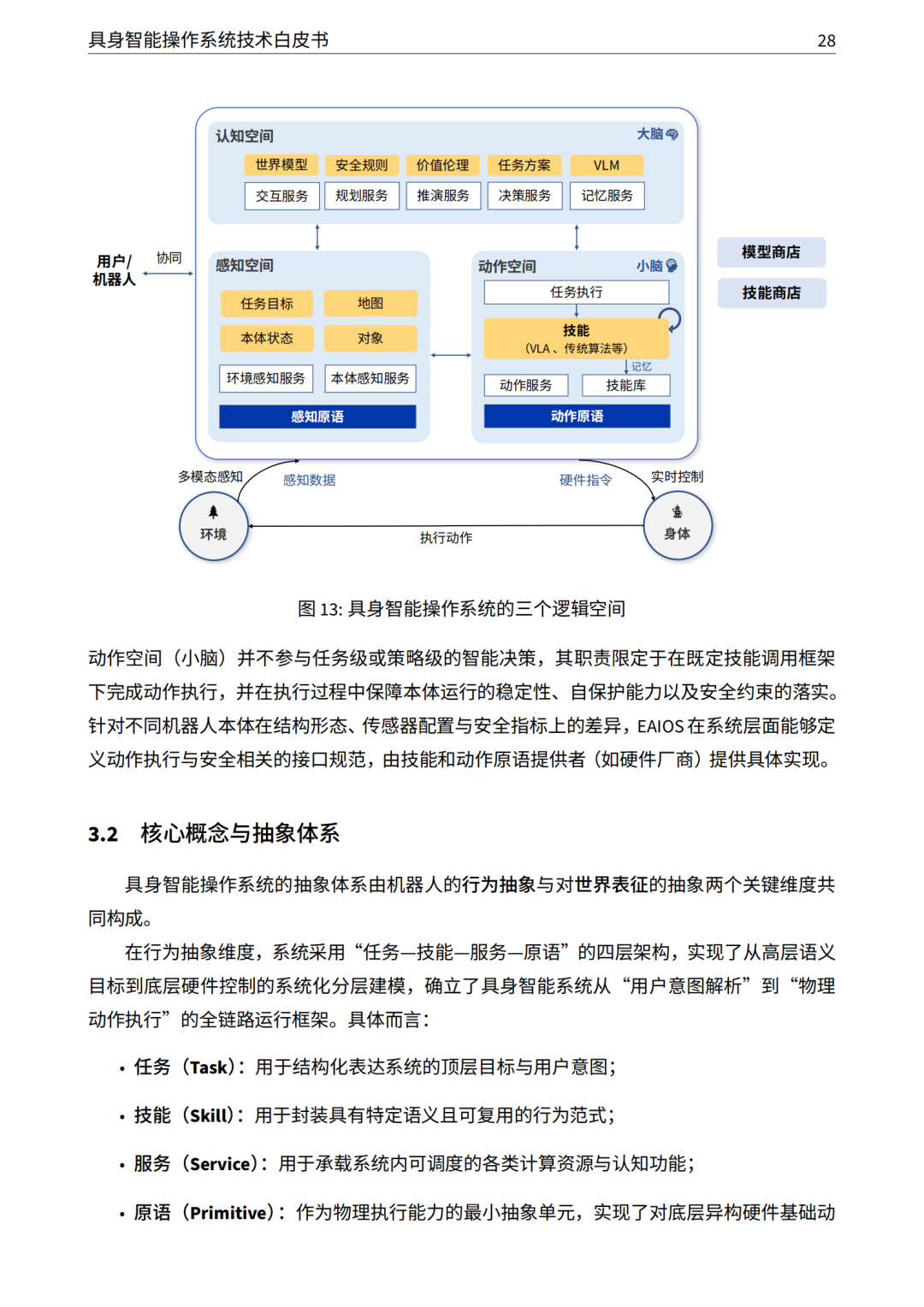
核心逻辑架构:分为感知空间、认知空间、动作空间三大核心域,分别承担环境与本体数字化重构、理解 / 预测 / 决策、高层决策转物理控制指令的功能。
核心抽象体系
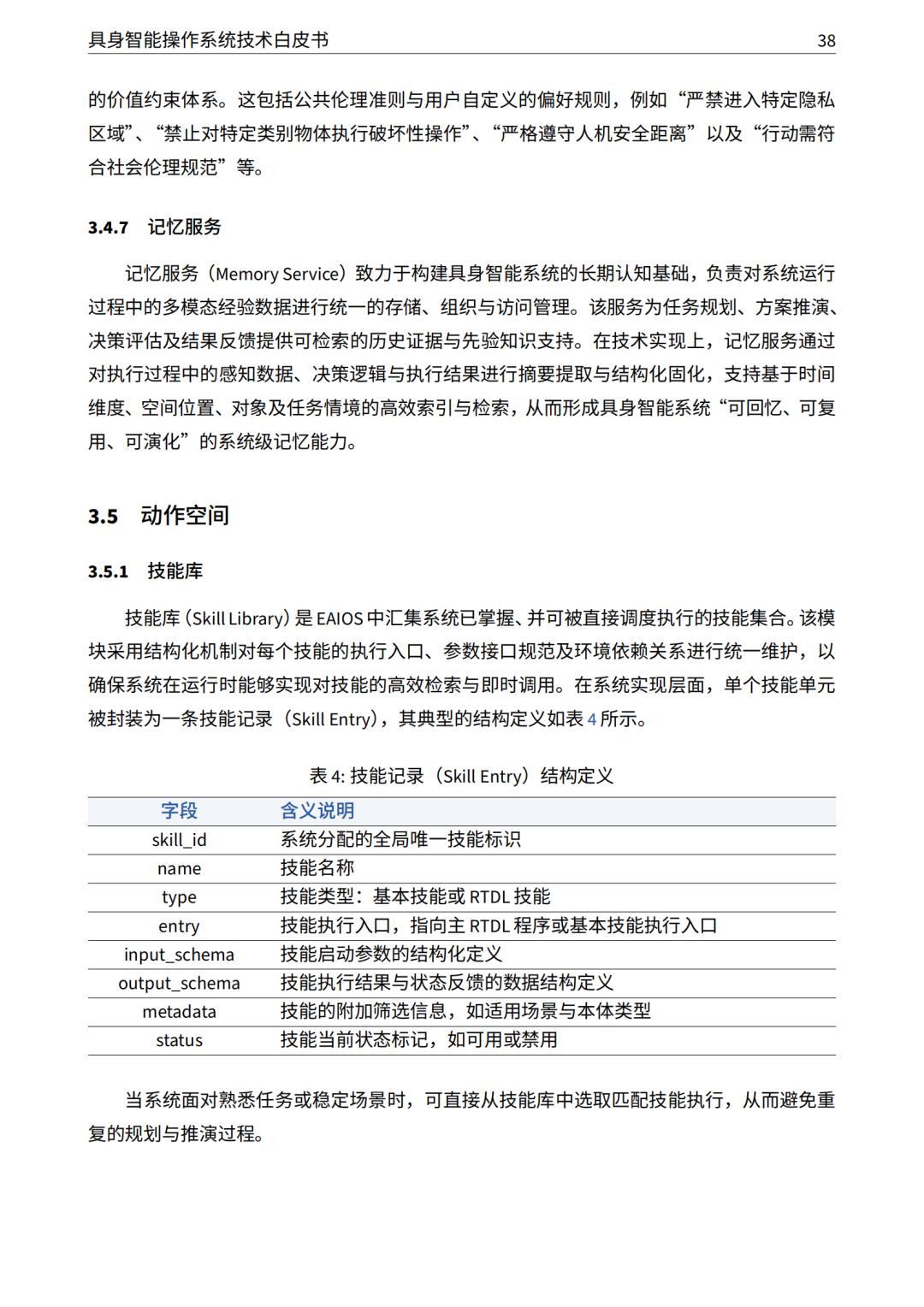
行为抽象:采用任务 — 技能 — 服务 — 原语四层架构,从顶层用户意图到底层硬件控制实现分层建模,原语为硬件抽象最小单元,技能为可复用行为单元,服务为运行时功能组件,任务为顶层目标抽象。
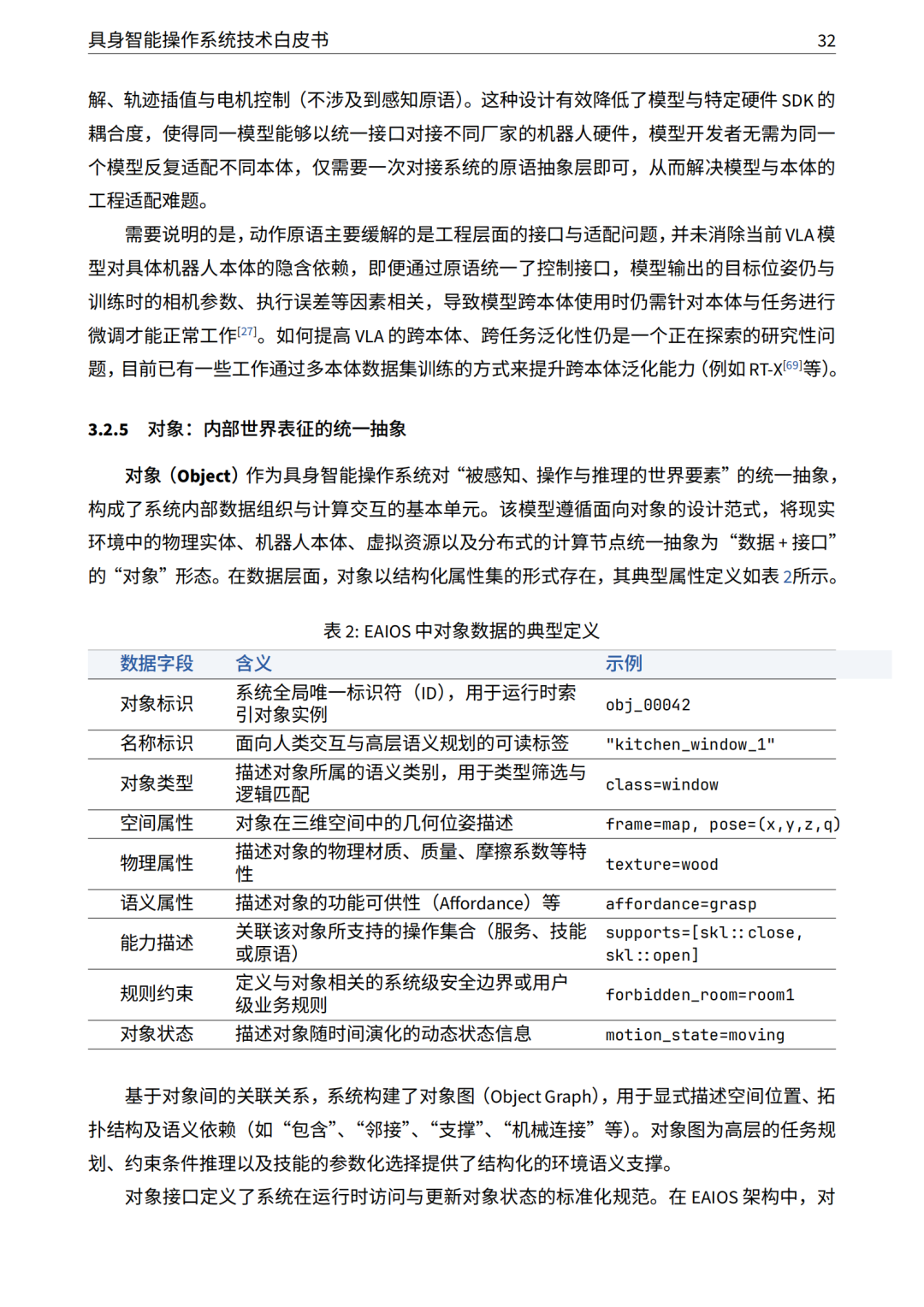
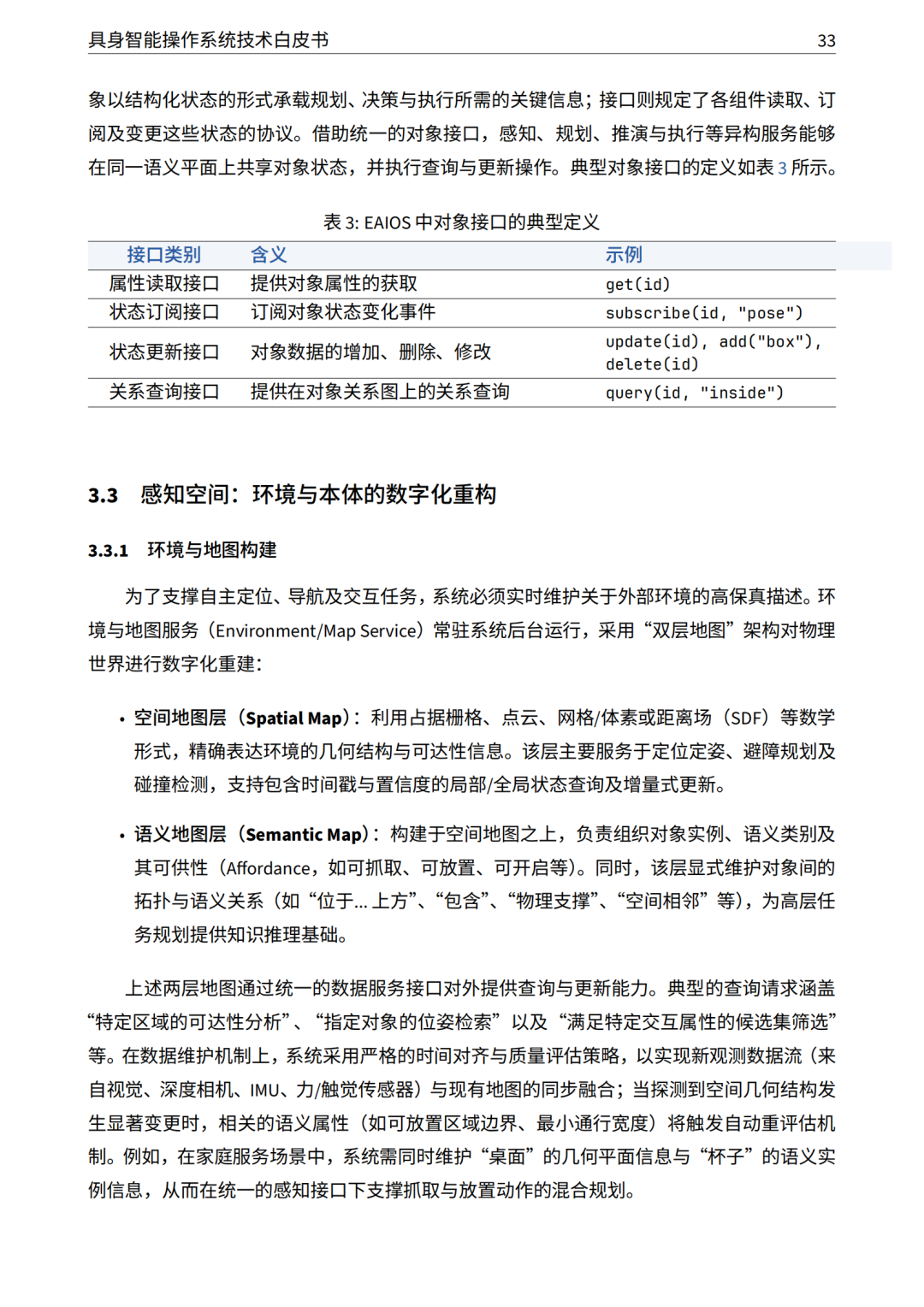
世界表征抽象:以对象为基本单元,将物理环境实体、机器人本体等统一抽象为 “数据 + 接口” 的对象,构建对象图支撑高层推理。
关键核心组件
世界模型:构建物理世界演化认知表征,实现状态补全和未来预测,为方案推演、安全验证提供支撑;
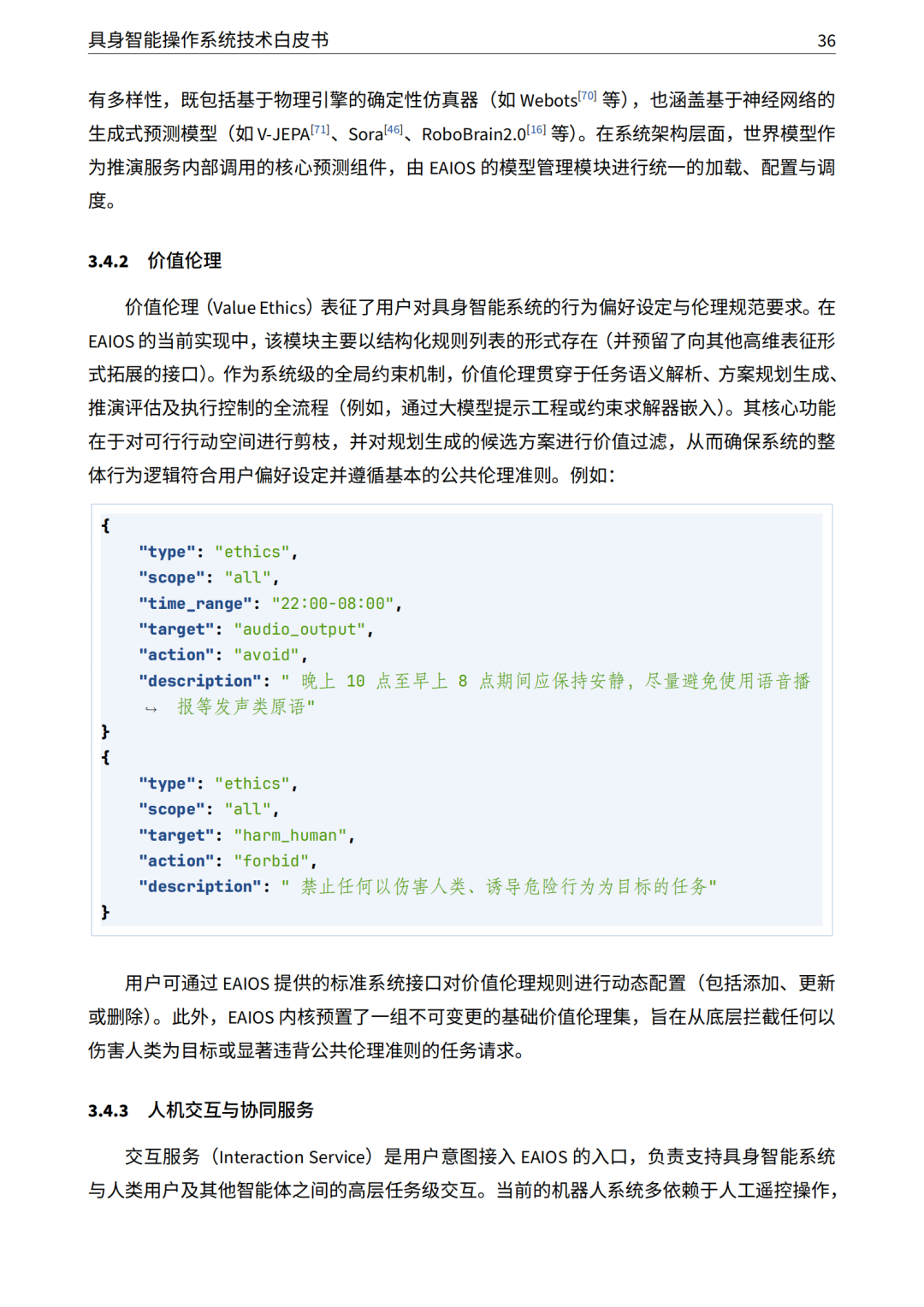
价值伦理与安全规则:前者为行为偏好和伦理约束,后者为物理运行安全边界,贯穿全流程保障系统行为合规、安全;
安全内核:基于 Linux 内核深度定制,引入任务语义驱动的动态调度机制,保障端侧多任务并发下的实时性和确定性。
运行机制:用户提交任务后,经任务规划生成 RTDL(机器人任务描述语言)方案,经世界模型推演验证、决策服务优选后,由动作空间调度技能 / 原语执行,执行结果经反馈评估,稳定的执行流程可固化为新技能存入技能库,实现智能能力持续积累,同时支持异常处理和多任务调度。
典型应用案例:以 “室内巡检” 为例,分别展示了基于厂商 VLA 模型和基于标准原语的两种执行模式,验证了 EAIOS 在软硬件解耦、技能复用、安全闭环方面的可行性。
四、新型具身智能计算硬件
现有硬件局限:架构专用性与原语调度存在适配鸿沟、实时性与确定性调度有硬件短板、生态碎片化导致适配成本高、模型部署缺乏端边云一致性,无法满足 EAIOS 核心诉求。
下一代硬件设计:遵循硬件原语化、实时确定性增强、生态标准化、模型适配柔性化四大原则,采用计算域 —I/O 中枢 — 控制域三域层次化参考架构,明确软硬件接口以原语为中心的规范化要求。
软硬件协同架构:以虚拟机监控器为底座,隔离计算 / IO / 控制资源,并行运行实时安全内核(承载 EAIOS 核心功能、模型推理)和 RTOS(负责强实时控制、异常快速响应),兼顾实时性、安全性和复杂任务支撑能力。
五、测试与验证
建立多维度测试体系,包括系统基本能力测试(接口符合性、调度稳定性、跨平台抽象一致性)、运行时行为与故障场景测试(故障注入验证鲁棒性、多任务资源竞争处理)、回归测试与基准用例集(保障系统迭代的行为稳定性),确保 EAIOS 在异构环境下的可靠性和兼容性。
六、开放生态与社区
生态核心角色:由硬件厂商(提供标准化原语)、服务开发者(封装算法为标准化服务)、技能开发者(构建可复用技能)、模型开发者(将智能模型封装为系统服务)四类角色构成,各角色分工明确、基于统一接口协同。
核心设计理念:采用 MulanPSL-2.0 开源协议,以统一接口规范和服务可插拔机制为核心,实现硬件适配、算法封装、模型提供、技能构建的高效协同,推动开放生态建设。
七、典型应用场景
EAIOS 可广泛应用于酒店服务、楼宇 / 园区 / 工厂巡检、仓内物流、智能工业装配、移动操作、养老 / 助残 / 康复护理等场景,针对各场景的工程痛点,通过软硬件解耦、技能复用、安全闭环、智能调度等能力,优化任务执行效率、降低部署成本、提升系统鲁棒性和安全性。
八、发展路线图
以开源原型 Robonix 为核心,分四个阶段推进,2025.11-2026.4 完成基础框架与原型构建,2026.4-2026.9 实现智能引擎接入与系统完善,2026.9-2027.1 推进技能生态建设与开发平台上线,2027.1-2027.6 完成社区构建与标准制定,最终实现多场景示范应用和产业生态成熟。
九、附录与接口规范
明确了具身智能领域核心名词解释,同时给出 EAIOS 在原语、服务、技能、任务四个层级的标准 API 设计示例,包括注册、查询、调用接口,以及标准原语(如底盘速度控制、RGB-D 采集)和标准服务(如空间地图、任务规划)的具体定义,为技术落地提供统一接口规范。
十、核心价值
EAIOS 通过操作系统范式重构具身智能工程基础,实现了 “身体”(硬件)与 “大脑”(模型 / 软件)的解耦,使各参与方能够独立分工发展,推动具身智能产业从 “作坊式” 开发走向规模化、生态化发展,为万亿级产业奠定核心基础设施基础,相关开源原型 Robonix 将为社区探索提供技术支撑。
点击文后阅读原文,可获得下载资料的方法。
欢迎加入智能交通技术群!扫码进入。

点击文后阅读原文,可获得下载资料的方法。

联系方式:微信号18515441838

立足具身智能前沿赛道,致力于搭建全球化、开源化、全栈式技术交流与实践共创平台。
更多推荐

 0
0 0
0- 0



 已为社区贡献11条内容
已为社区贡献11条内容

所有评论(0)