云深处四足机器人运动控制环境搭建-基于算力自由云平台
本文介绍了基于IsaacLab的四足机器人训练与部署流程。主要内容包括:1)在云平台创建实例并修改conda/pip缓存路径至数据盘;2)搭建训练环境:激活conda环境、克隆rl_training代码库、安装依赖并验证;3)部署环境配置:安装调试工具、克隆Lite3_rl_deploy代码库,完成编译后通过两个终端分别运行仿真器和控制程序。文档详细说明了训练测试命令和部署后的操作指令(如wasd
·
参考资料
1. Installation using Isaac Sim Pip Package — Isaac Lab Documentation
2. 四足运控,从入门到精通
3. GitHub - DeepRoboticsLab/rl\_training: RL\_Training Repo Based on Isaaclab
4. GitHub-DeepRoboticsLab/Lite3_rl_deploy:
1、登录算力自由云平台,根据官方提供的镜像创建实例
2、云平台默认缓存路径更换
由于云平台的系统盘不可扩容,建议将默认缓存路径更换至数据盘
1. conda的默认缓存路径更换
# 打开终端,输入如下命令
# 添加环境安装目录(新环境将默认装在这里)
conda config --add envs_dirs /root/gpufree-data/conda/envs
# 添加包缓存目录(下载的包将缓存在这里)
conda config --add pkgs_dirs /root/gpufree-data/conda/pkgs
# 终端使用命令 conda info 查看是否变更
2. pip默认缓存路径更换
# 打开终端,输入如下命令
pip config set global.cache-dir /root/gpufree-data/pip/cache
# 使用命令 pip config list 查看是否变更
3、搭建训练环境
1. 激活conda环境(默认激活,若未激活可使用如下命令)
conda activate isaac
2. 拉取rl_training代码
git clone --recurse-submodules https://github.com/DeepRoboticsLab/rl_training.git
3. 安装依赖
python -m pip install -e source/rl_training
4. 验证安装
python scripts/tools/list_envs.py
5. 测试(Lite3为例)
# Train
python scripts/reinforcement_learning/rsl_rl/train.py --task=Rough-Deeprobotics-Lite3-v0 --headless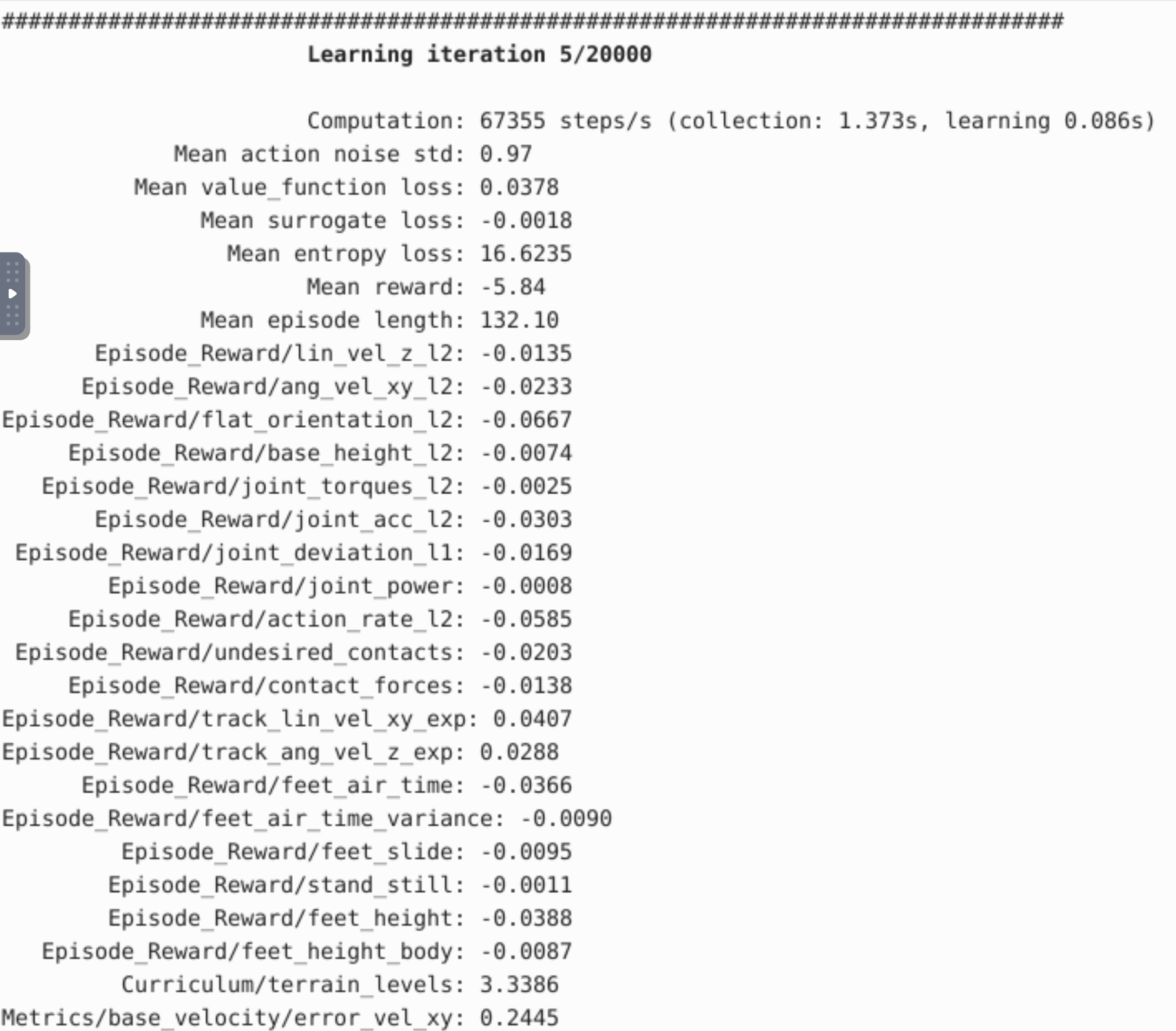
# Play
python scripts/reinforcement_learning/rsl_rl/play.py --task=Rough-Deeprobotics-Lite3-v0 --num_envs=10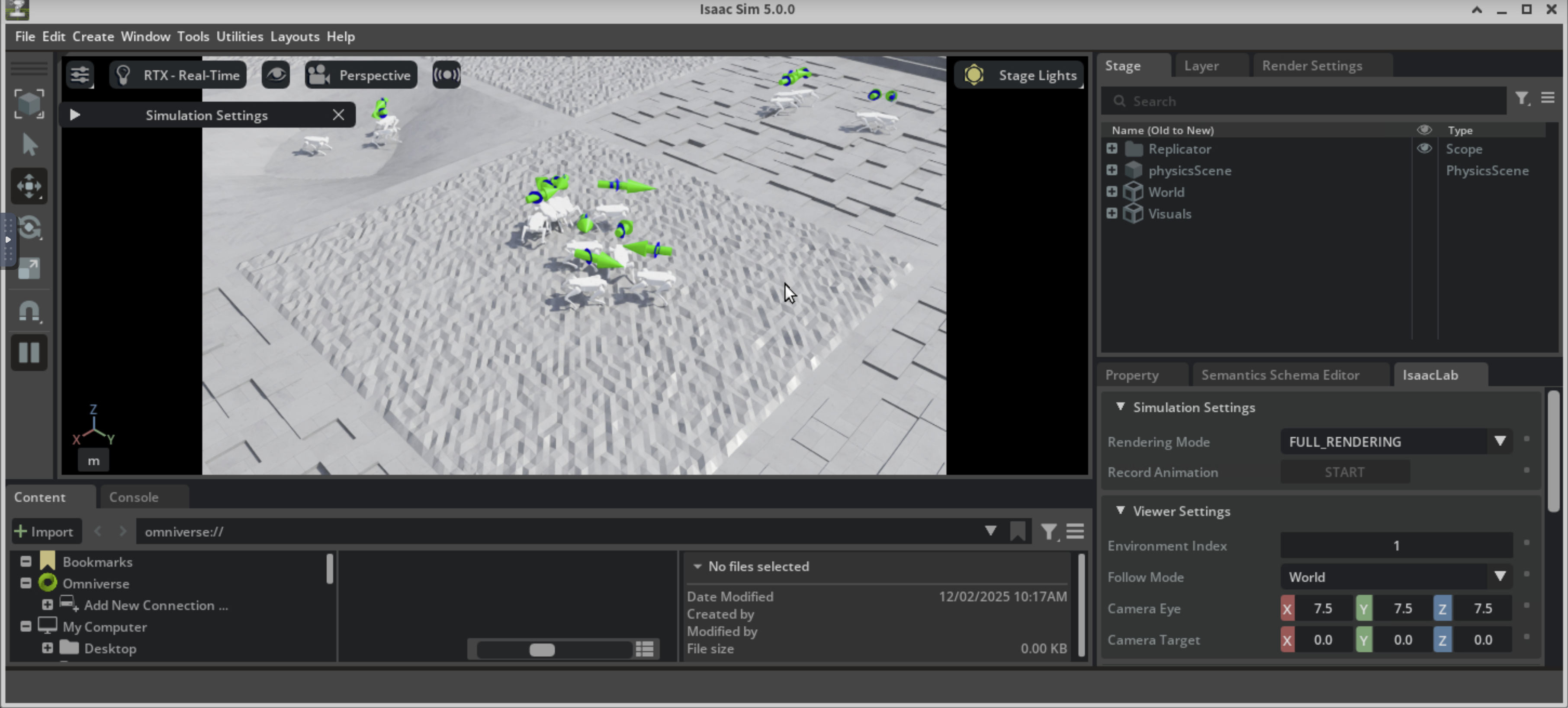
4、搭建部署环境
1. 安装segmentation debug工具
sudo apt-get install libdw-dev
wget https://raw.githubusercontent.com/bombela/backward-cpp/master/backward.hpp
sudo mv backward.hpp /usr/include
2. 依赖安装 并拉取Lite3_rl_deploy代码 (python3.10)
pip install pybullet "numpy < 2.0" mujoco
git clone --recurse-submodule https://github.com/DeepRoboticsLab/Lite3_rl_deploy.git
3. 编译
mkdir build && cd build
cmake .. -DBUILD_PLATFORM=x86 -DBUILD_SIM=ON -DSEND_REMOTE=OFF
# 指令解释
# -DBUILD_PLATFORM:电脑平台,Ubuntu为x86,机器狗运动主机为arm
# -DBUILD_SIM:是否使用仿真器,如果在实机上部署设为OFF
make -j
4. 运行 (打开两个终端)
#终端1 (pybullet)
cd interface/robot/simulation
python3 pybullet_simulation.py
# 终端1 (mujoco)
cd interface/robot/simulation
python3 mujoco_simulation.py
# 终端2
cd build
./rl_deploy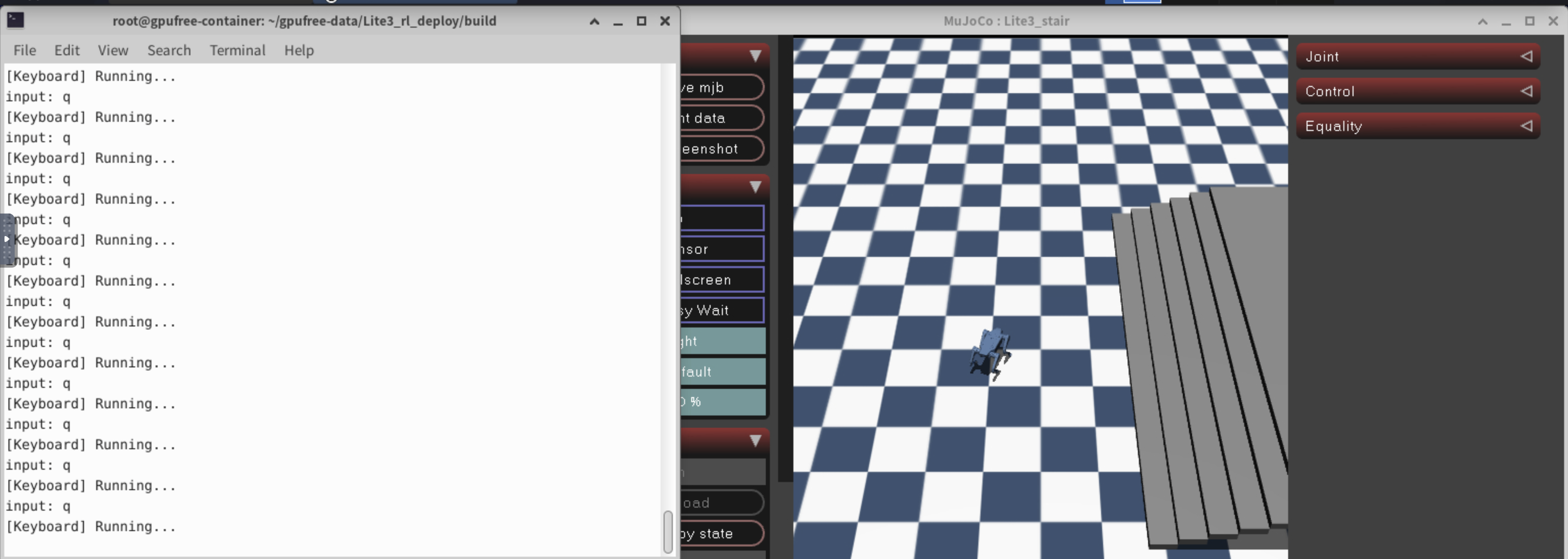
5. 终端2操作命令
Tips:可以将仿真器窗口设置始终位于最上层,方便可视化
- z: 机器狗静止进入默认状态
- c: 机器狗静止进入rl控制状态
- wasd:前后左右
- qe:顺逆时针旋转

立足具身智能前沿赛道,致力于搭建全球化、开源化、全栈式技术交流与实践共创平台。
更多推荐

 7
7 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)