基于 Qi 协议的无线充电系统 PID 功率闭环控制算法
0x03 包里传输的是一个。
摘要
Qi 标准作为全球主流的无线充电技术规范,其功率传输的稳定性、动态响应能力与安全性,核心依赖于发射端(PTx)与接收端(PRx)协同的闭环功率控制机制。本文基于 Qi v1.2.4 协议规范,深入解析了无线充电系统中离散 PID 控制算法的协议约束、核心原理、执行流程与工程实现方法,重点阐述了 PID 算法在充电全流程中对功率的动态调整逻辑,同时结合协议强制要求提出了工程化优化方案,为合规、高性能的无线充电产品开发提供了完整的技术参考。
一、引言
随着消费电子、智能家居等领域的快速发展,磁感应式无线充电凭借其便捷、安全、无物理接口磨损的优势,已成为移动终端的标配功能。由无线充电联盟(WPC)制定的 Qi 协议,是目前应用最广泛的无线充电标准,其中 Power Class 0 规范覆盖了 5W 基线功率配置(BPP)与 15W 扩展功率配置(EPP)两大主流应用场景。
无线充电的功率传输本质是一个强耦合、强非线性的动态系统:接收端的负载变化、发射与接收线圈的耦合偏移、输入电压波动、异物介入等因素,都会直接导致输出电压 / 功率的偏移。为了保证充电过程的稳定与安全,强制要求发射端必须采用离散比例 - 积分 - 微分(PID)控制算法,响应接收端的控制指令,实现对原边线圈电流的精准调控,最终完成功率的闭环调整。
本文将围绕 Qi 协议的强制规范,结合协议定义的 PID 控制框图,完整拆解该算法在无线充电过程中的功率调整逻辑与实现方法。
1.1收到0x03包(控制误差)
虽然物理上存储的是 0-255 的无符号整数,但在协议逻辑中,它被解释为有符号的二进制补码,范围是 -128 到 +127。
0x03 包里传输的是一个功率调整指令,数值大小代表调整的急切程度,正负代表方向。
二、Qi 协议对无线充电功率控制的核心规范要求
2.1 功率闭环的系统角色分工
Qi 无线充电系统的功率控制是一个接收端主导、发射端执行的闭环架构,二者的核心分工在协议中做了明确界定:
- 功率接收端(PRx):作为闭环的 “大脑”,实时监测自身整流后电压、输出电流、电池温度等核心参数,对比目标控制点(期望的充电电压 / 电流)计算出控制误差值,并通过反向调制将控制误差包(CEP)发送给发射端,是功率调整的指令发起方。
- 功率发射端(PTx):作为闭环的 “执行机构”,接收 PRx 发来的控制误差包,通过协议规定的 PID 算法,将误差指令转换为逆变器的工作频率、占空比或输入电压等硬件参数,调整原边线圈的电流与发射功率,是功率调整的执行方。
协议明确要求:正的控制误差值必须使原边线圈电流增大,负的控制误差值必须使原边线圈电流减小,从根本上保证了不同厂商设备间的控制逻辑兼容性。
2.2 功率控制的强制时序约束
为了保证控制的稳定性与通信的可靠性,Qi 协议对 PID 算法的执行时序做了严格的硬约束,所有合规产品必须满足:
表格
| 时序参数 | 协议约束范围 | 核心作用 |
|---|---|---|
| t_delay(功率控制保持时间) | 5ms ≤ t_delay ≤ 205ms | 控制误差包发送后,等待原边电流稳定的时间,避免采样误差 |
| t_active(功率调整窗口) | 最大 21ms | PID 算法迭代调整的总时间窗口,必须在该窗口内完成所有迭代计算与硬件更新 |
| t_inner(单次迭代执行时间) | 1ms ≤ t_inner ≤ 5ms | PID 单轮迭代的执行周期,迭代次数 i_max 满足 i_max・t_inner = t_active |
| t_settle(稳定等待时间) | 3ms ≤ t_settle ≤7ms | PID 调整完成后,等待系统进入稳态的时间,用于采样最终的电流反馈值 |
2.3 功率调整的安全边界约束
协议同时对 PID 算法的输出做了强制安全限制,避免硬件失控与安全风险:
- 被控变量(工作频率、占空比、输入电压)必须限制在硬件安全范围内,其中工作频率必须落在 110~205kHz 的协议规定区间;
- 积分项与 PID 总输出必须做限幅处理,防止积分饱和与输出过载导致的电流 / 电压超调;
- 发射端必须限制原边线圈电流的最大值,保证接收端整流电压不超过 20V 的安全上限。
三、Qi 协议 PID 功率控制算法的核心原理与架构
Qi 协议定义的 PID 控制算法,是一套离散域的位置式 PID 控制方案,其完整的控制架构与信号流如图 1 所示(即用户提供的协议标准框图)。该算法以接收端的控制误差指令为输入,以原边线圈的实测电流为反馈,最终输出逆变器的硬件控制参数,形成完整的闭环控制链路。
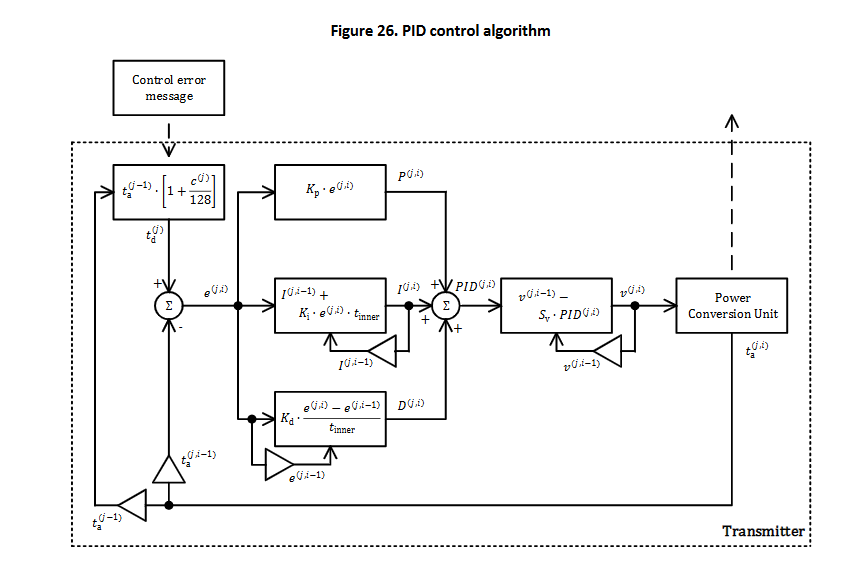
图 1 Qi 协议标准 PID 功率控制算法框图
整个控制链路可拆解为 6 个核心模块,每个模块的计算逻辑与协议用法如下:
3.1 目标电流计算模块:控制指令的物理转换
该模块是 PID 算法的入口,核心作用是将 PRx 发来的抽象 8 位有符号控制误差值,转换为 PTx 可执行的目标原边线圈电流,其协议规定的计算公式为:td(j)=ta(j−1)⋅[1+128c(j)]公式中各参数的物理意义:
- j:第j个控制周期,对应 PRx 发来的第j个控制误差包;
- c(j):PRx 发送的 8 位有符号控制误差值,取值范围 - 128~+127;
- ta(j−1):第j−1个控制周期结束后,原边线圈的稳态实测电流;
- td(j):第j个控制周期的目标原边线圈电流,即 PID 控制器的设定值。
该公式的核心设计逻辑是对误差值的归一化处理:分母 128 实现了对 8 位误差值的线性缩放,当c(j)=127时,目标电流接近翻倍;当c(j)=−128时,目标电流归零,完美匹配了无线充电 “升功率 / 降功率” 的核心控制需求。
3.2 误差计算环节:PID 控制器的输入生成
误差是 PID 控制的核心输入,其计算公式为:e(j,i)=td(j)−ta(j,i−1)其中i为单个控制周期内的第i次 PID 迭代,ta(j,i−1)为上一次迭代的实测电流反馈值。
- 当e(j,i)>0时,实际电流小于目标值,需要提升发射功率;
- 当e(j,i)<0时,实际电流大于目标值,需要降低发射功率;
- 当e(j,i)=0时,电流达到目标,无需调整。
在第j个控制周期的首次迭代(i=1)时,协议规定初始反馈值ta(j,0)=ta(j−1),即以上一周期的稳态电流作为迭代起点。
3.3 PID 三环节计算:控制律的核心实现
协议将 PID 控制器拆解为比例、积分、微分三个独立环节,分别承担不同的控制功能,三者协同实现 “快速响应、无静差、低超调” 的控制效果。
3.3.1 比例环节(P):误差的快速响应
比例环节是 PID 的核心响应单元,其输出与当前误差值成正比,计算公式为:P(j,i)=Kp⋅e(j,i)其中Kp为比例增益系数,由 Qi 协议参考设计定义固定值,保证跨厂商设备的兼容性。比例环节的核心作用是即时响应误差:误差越大,输出调整量越大,快速缩小目标电流与实际电流的差距。但纯比例控制无法消除稳态静差,且Kp过大会导致系统震荡、电流超调。
3.3.2 积分环节(I):稳态静差的消除
积分环节通过对误差的持续累积,消除比例环节无法解决的微小稳态误差,计算公式为:I(j,i)=I(j,i−1)+Ki⋅e(j,i)⋅tinner其中Ki为积分增益系数,tinner为单次迭代的执行时间。协议对积分环节做了两项关键强制约束:
- 每个控制周期开始时,积分项必须强制清零(I(j,0)=0),避免跨周期的积分累积导致系统失控;
- 积分项必须限幅在[−M1,+M1]范围内,防止积分饱和现象 —— 误差长期存在时,积分项过度累积导致电流严重超调。
3.3.3 微分环节(D):超调与震荡的抑制
微分环节通过误差的变化率预判系统趋势,提前制动抑制超调,提升系统动态稳定性,计算公式为:D(j,i)=Kd⋅tinnere(j,i)−e(j,i−1)其中Kd为微分增益系数。微分环节的输出与误差的变化速度成正比,误差变化越快,微分输出越大,可有效抑制线圈耦合突变、负载阶跃带来的电流超调。
3.4 PID 总输出合成与限幅
三个环节的输出叠加后,得到 PID 的总控制调整量,公式为:PID(j,i)=P(j,i)+I(j,i)+D(j,i)协议强制要求,总输出PID(j,i)必须限幅在[−MPID,+MPID]范围内,防止单次调整量过大,导致逆变器工作状态突变、系统谐振失谐。
3.5 被控变量更新模块:硬件驱动的转换
该模块将 PID 的数字调整量,转换为功率变换单元可执行的硬件参数,协议规定的计算公式为:v(j,i)=v(j,i−1)−Sv⋅PID(j,i)其中:
- v(j,i)为被控变量,可选逆变器工作频率、驱动占空比或直流输入电压,Qi 协议默认以工作频率为核心被控变量;
- Sv为缩放系数,与被控变量的类型强相关,由协议参考设计定义;
- 公式中的负号,匹配了 Qi 系统的功率特性:工作频率越低,原边线圈电流越大,发射功率越高;PID 正输出对应降频升功率,负输出对应升频降功率,完全匹配控制目标。
协议同时要求,计算出的被控变量若超出硬件安全范围,必须强制替换为边界值,防止硬件损坏。
3.6 功率变换与反馈闭环
更新后的被控变量输入到半桥 / 全桥功率变换单元,逆变器调整驱动信号改变原边线圈的工作状态,最终调整原边电流。同时,采样电路实时采集实际的原边线圈电流ta(j,i),送回误差计算环节,完成本次迭代的闭环,同时作为下一次迭代的反馈初始值。
四、充电全流程中 PID 算法的功率调整执行逻辑
无线充电的完整流程分为选择、ping、识别配置、协商、校准、功率传输六大阶段,其中 PID 算法的核心工作场景是功率传输阶段,同时适配充电全周期的负载变化与工况波动。
4.1 充电启动阶段:PID 的初始化与首次迭代
当系统完成协商与校准,进入功率传输阶段后,PID 算法执行首次初始化:
- PRx 发送首个控制误差包,PTx 提取控制误差值c(j);
- 以 ping 阶段的稳态原边电流作为初始反馈值ta(j−1),计算首个控制周期的目标电流td(j);
- 按照协议时序要求,在tactive窗口内完成 PID 迭代,逐步将原边电流调整到目标值,建立稳定的初始充电功率。
该阶段 PID 的核心目标是平稳建压,避免启动阶段的电压过冲,保护接收端的充电芯片与电池。
4.2 恒流充电阶段:PID 的动态负载跟随
恒流阶段是锂电池充电的核心阶段,负载电流稳定但电池电压持续上升,PRx 会持续发送控制误差指令调整目标功率,PID 算法的核心作用是精准跟随负载变化:
- 当电池电压上升,PRx 需要维持恒流,会发送正的误差值,要求提升发射功率;
- PTx 通过 PID 算法快速调整原边电流,在协议规定的时序内完成功率提升,保证充电电流的稳态误差在协议允许范围内;
- 当出现线圈耦合偏移(用户移动手机)、输入电压波动时,PRx 会实时发送误差指令,PID 算法通过微分环节快速抑制电流波动,保证充电过程不中断。
协议中负载阶跃测试要求,PTx 必须能处理 10%~100% 的负载阶跃变化,PID 算法的比例与微分环节协同,可保证负载突变时输出电压不超出协议规定的波动范围。
4.3 恒压充电阶段:PID 的轻载稳定控制
当电池电压达到充电截止电压后,系统进入恒压阶段,充电电流持续下降,最终进入涓流充电状态,此时 PID 算法的核心挑战是轻载稳定性:
- 轻载状态下,系统的环路增益大幅变化,容易出现震荡,协议要求 PTx 必须支持 5% 额定功率的轻载稳定输出;
- PID 算法通过积分限幅、增益自适应调整,避免轻载下的积分饱和与震荡,保证输出电压的稳态精度;
- 当电池充满后,PRx 发送充电完成的结束功率传输包,PTx 通过 PID 算法快速将原边电流降至零,结束功率传输。
4.4 异常工况下的 PID 安全调整
PID 算法同时适配充电过程中的异常工况,配合协议的安全保护机制实现功率管控:
- 过温保护:当 PRx 检测到电池 / 线圈温度过高,会发送负的误差值,要求降功率,PID 算法快速降低原边电流,将功率限制在安全范围;
- 异物检测(FOD)触发:当 PTx 通过功率损耗法检测到异物,会通过反向通信要求 PRx 降功率,PID 算法逐步降低发射功率,最终停止功率传输,避免异物过热;
- 过压保护:当 PRx 检测到整流电压超限时,会发送大幅负误差值,PID 算法在单周期内将原边电流降至安全范围,配合硬件过压保护实现双重防护。
五、PID 算法工程实现的关键优化与协议合规设计
在实际产品开发中,纯理论的 PID 算法难以适配无线充电的复杂工况,需要结合协议要求与工程实践做针对性优化,同时保证完全符合 Qi 规范。
5.1 抗积分饱和优化
协议强制要求积分项限幅,工程中通常采用遇限削弱积分法:当 PID 输出达到限幅边界时,停止积分项的累积,只累加使输出向限幅内收缩的误差,从根本上避免积分饱和现象,尤其适配恒压阶段的轻载工况与充电结束的降功率过程。
5.2 微分环节的噪声抑制
微分环节对电流采样的噪声极为敏感,工程中采用一阶低通滤波的不完全微分 PID,在微分环节后加入一阶低通滤波器,滤除采样噪声的同时保留微分的超前调节作用,避免高频噪声导致的系统震荡,提升耦合偏移工况下的控制稳定性。
5.3 分段式 PID 参数适配
无线充电系统在满功率、轻载、强耦合、弱耦合等不同工况下,环路特性差异极大。工程中采用分段式 PID 参数:根据当前的发射功率、线圈耦合强度,自动切换适配的、、增益系数,既保证满功率下的快速响应,又兼顾轻载下的稳定控制,同时所有参数均符合 Qi 协议参考设计的约束范围,保证设备兼容性。
5.4 时序约束的精准适配
协议对 PID 的执行时序有严格硬约束,工程实现中必须采用硬件定时器精准控制迭代周期:
- 用定时器中断触发单次 PID 迭代,保证tinner的精度在微秒级;
- 严格控制迭代次数imax,确保所有迭代在tactive窗口内完成;
- 迭代完成后,在tsettle时间窗口结束时精准采样稳态电流,保证反馈值的准确性。
六、结论
Qi 协议中定义的离散 PID 控制算法,是无线充电系统功率闭环控制的核心,其通过标准化的控制架构、公式与时序约束,实现了不同厂商设备间的兼容互通,同时保证了充电过程的稳定性、动态响应能力与安全性。
在实际产品开发中,开发者必须严格遵循协议的强制规范,同时结合工程实践对 PID 算法进行抗积分饱和、噪声抑制、分段参数适配等优化,才能开发出合规、高性能、高可靠性的无线充电产品。随着无线充电技术向高功率、多设备、高集成度方向发展,基于 PID 算法的自适应、非线性优化控制方案,也将成为未来技术研发的核心方向。

立足具身智能前沿赛道,致力于搭建全球化、开源化、全栈式技术交流与实践共创平台。
更多推荐

 23
23 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)