Ubuntu22.04 + ROS2 Humble + ORB-SLAM3 下从环境配置到深度相机d435实时SLAM
本文详细介绍了ORB-SLAM3在Ubuntu22.04系统上的安装部署过程。首先需要安装基础编译工具和关键依赖库(Eigen3、Pangolin、OpenCV),然后编译ORB-SLAM3核心库并集成到ROS2Humble工作空间。文章还列举了可能遇到的常见错误(如std::bad_array_new_length和doublefree问题)及其解决方法。整个安装过程包括环境准备、依赖安装、源码
一、安装部署ORB-SLAM3
1. 准备工作与基础环境
首先,请确保你的Ubuntu 22.04系统已经更新,并安装了build-essential, cmake, git等基础编译工具:
sudo apt update && sudo apt upgrade -y
sudo apt install -y git cmake gcc g++ build-essential pkg-config wget curl unzip tar
2. 安装关键依赖库
ORB-SLAM3的运行依赖于多个第三方库,需要逐一正确安装。如果之前二进制安装过以下包,需要先把它们都卸载移除。
(1)Eigen3 (版本 3.3.9)
用于高效的线性代数运算,推荐从源码编译安装。
打开终端,依次输入:
cd ~克隆代码:
git clone -b 3.3.9 https://gitlab.com/libeigen/eigen.git创建并进入 build 目录:
cd eigen && mkdir build && cd build编译:
cmake ..安装:
sudo make install(2)Pangolin (版本 v0.6)
用于可视化,需先安装其图形依赖。
打开终端,依次输入:
cd ~sudo apt install -y libgl1-mesa-dev libglew-dev libwayland-dev libxkbcommon-dev wayland-protocols libegl1-mesa-dev libpython3-dev克隆代码:
git clone -b v0.6 https://github.com/stevenlovegrove/Pangolin.git创建并进入 build 目录:
cd Pangolin && mkdir build && cd build编译:
cmake .. -DCMAKE_BUILD_TYPE=Releasemake -j$(nproc)安装:
sudo make install(3)OpenCV (推荐4.5.4)
Ubuntu 22.04的官方源默认提供,可直接安装:
sudo apt install -y libopencv-dev python3-opencv3. 编译ORB-SLAM3核心库
独立编译ORB-SLAM3算法库,确保其在不依赖ROS的情况下能正常工作。
(1)克隆源码
在用户主目录下克隆官方仓库:
cd ~
git clone https://github.com/UZ-SLAMLab/ORB_SLAM3.gitcd ORB_SLAM3注意:
检查
CMakeLists.txt文件中OpenCV和Eigen3的查找路径是否正确,或手动指定路径。cmake_minimum_required(VERSION 2.8) set(CMAKE_CXX_STANDARD 14) project(ORB_SLAM3) IF(NOT CMAKE_BUILD_TYPE) SET(CMAKE_BUILD_TYPE Release) ENDIF() MESSAGE("Build type: " ${CMAKE_BUILD_TYPE}) set(CMAKE_C_FLAGS "${CMAKE_C_FLAGS} -Wall -O3") set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -Wall -O3") set(CMAKE_C_FLAGS_RELEASE "${CMAKE_C_FLAGS_RELEASE} -march=native") set(CMAKE_CXX_FLAGS_RELEASE "${CMAKE_CXX_FLAGS_RELEASE} -march=native") # Check C++11 or C++0x support include(CheckCXXCompilerFlag) CHECK_CXX_COMPILER_FLAG("-std=c++11" COMPILER_SUPPORTS_CXX11) CHECK_CXX_COMPILER_FLAG("-std=c++0x" COMPILER_SUPPORTS_CXX0X) if(COMPILER_SUPPORTS_CXX11) set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -std=c++11") add_definitions(-DCOMPILEDWITHC11) message(STATUS "Using flag -std=c++11.") elseif(COMPILER_SUPPORTS_CXX0X) set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -std=c++0x") add_definitions(-DCOMPILEDWITHC0X) message(STATUS "Using flag -std=c++0x.") else() message(FATAL_ERROR "The compiler ${CMAKE_CXX_COMPILER} has no C++11 support. Please use a different C++ compiler.") endif() LIST(APPEND CMAKE_MODULE_PATH ${PROJECT_SOURCE_DIR}/cmake_modules) find_package(OpenCV 4.4) if(NOT OpenCV_FOUND) message(FATAL_ERROR "OpenCV > 4.4 not found.") endif() MESSAGE("OPENCV VERSION:") MESSAGE(${OpenCV_VERSION}) find_package(Eigen3 3.1.0 REQUIRED) find_package(Pangolin REQUIRED) find_package(realsense2) include_directories( ${PROJECT_SOURCE_DIR} ${PROJECT_SOURCE_DIR}/include ${PROJECT_SOURCE_DIR}/include/CameraModels ${PROJECT_SOURCE_DIR}/Thirdparty/Sophus ${EIGEN3_INCLUDE_DIR} ${Pangolin_INCLUDE_DIRS} ) set(CMAKE_LIBRARY_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/lib) add_library(${PROJECT_NAME} SHARED src/System.cc src/Tracking.cc src/LocalMapping.cc src/LoopClosing.cc src/ORBextractor.cc src/ORBmatcher.cc src/FrameDrawer.cc src/Converter.cc src/MapPoint.cc src/KeyFrame.cc src/Atlas.cc src/Map.cc src/MapDrawer.cc src/Optimizer.cc src/Frame.cc src/KeyFrameDatabase.cc src/Sim3Solver.cc src/Viewer.cc src/ImuTypes.cc src/G2oTypes.cc src/CameraModels/Pinhole.cpp src/CameraModels/KannalaBrandt8.cpp src/OptimizableTypes.cpp src/MLPnPsolver.cpp src/GeometricTools.cc src/TwoViewReconstruction.cc src/Config.cc src/Settings.cc include/System.h include/Tracking.h include/LocalMapping.h include/LoopClosing.h include/ORBextractor.h include/ORBmatcher.h include/FrameDrawer.h include/Converter.h include/MapPoint.h include/KeyFrame.h include/Atlas.h include/Map.h include/MapDrawer.h include/Optimizer.h include/Frame.h include/KeyFrameDatabase.h include/Sim3Solver.h include/Viewer.h include/ImuTypes.h include/G2oTypes.h include/CameraModels/GeometricCamera.h include/CameraModels/Pinhole.h include/CameraModels/KannalaBrandt8.h include/OptimizableTypes.h include/MLPnPsolver.h include/GeometricTools.h include/TwoViewReconstruction.h include/SerializationUtils.h include/Config.h include/Settings.h) add_subdirectory(Thirdparty/g2o) target_link_libraries(${PROJECT_NAME} ${OpenCV_LIBS} ${EIGEN3_LIBS} ${Pangolin_LIBRARIES} ${PROJECT_SOURCE_DIR}/Thirdparty/DBoW2/lib/libDBoW2.so ${PROJECT_SOURCE_DIR}/Thirdparty/g2o/lib/libg2o.so -lboost_serialization -lcrypto ) # If RealSense SDK is found the library is added and its examples compiled if(realsense2_FOUND) include_directories(${PROJECT_NAME} ${realsense_INCLUDE_DIR} ) target_link_libraries(${PROJECT_NAME} ${realsense2_LIBRARY} ) endif() # Build examples # RGB-D examples set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/Examples/RGB-D) add_executable(rgbd_tum Examples/RGB-D/rgbd_tum.cc) target_link_libraries(rgbd_tum ${PROJECT_NAME}) if(realsense2_FOUND) add_executable(rgbd_realsense_D435i Examples/RGB-D/rgbd_realsense_D435i.cc) target_link_libraries(rgbd_realsense_D435i ${PROJECT_NAME}) endif() # RGB-D inertial examples set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/Examples/RGB-D-Inertial) if(realsense2_FOUND) add_executable(rgbd_inertial_realsense_D435i Examples/RGB-D-Inertial/rgbd_inertial_realsense_D435i.cc) target_link_libraries(rgbd_inertial_realsense_D435i ${PROJECT_NAME}) endif() #Stereo examples set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/Examples/Stereo) add_executable(stereo_kitti Examples/Stereo/stereo_kitti.cc) target_link_libraries(stereo_kitti ${PROJECT_NAME}) add_executable(stereo_euroc Examples/Stereo/stereo_euroc.cc) target_link_libraries(stereo_euroc ${PROJECT_NAME}) add_executable(stereo_tum_vi Examples/Stereo/stereo_tum_vi.cc) target_link_libraries(stereo_tum_vi ${PROJECT_NAME}) if(realsense2_FOUND) add_executable(stereo_realsense_t265 Examples/Stereo/stereo_realsense_t265.cc) target_link_libraries(stereo_realsense_t265 ${PROJECT_NAME}) add_executable(stereo_realsense_D435i Examples/Stereo/stereo_realsense_D435i.cc) target_link_libraries(stereo_realsense_D435i ${PROJECT_NAME}) endif() #Monocular examples set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/Examples/Monocular) add_executable(mono_tum Examples/Monocular/mono_tum.cc) target_link_libraries(mono_tum ${PROJECT_NAME}) add_executable(mono_kitti Examples/Monocular/mono_kitti.cc) target_link_libraries(mono_kitti ${PROJECT_NAME}) add_executable(mono_euroc Examples/Monocular/mono_euroc.cc) target_link_libraries(mono_euroc ${PROJECT_NAME}) add_executable(mono_tum_vi Examples/Monocular/mono_tum_vi.cc) target_link_libraries(mono_tum_vi ${PROJECT_NAME}) if(realsense2_FOUND) add_executable(mono_realsense_t265 Examples/Monocular/mono_realsense_t265.cc) target_link_libraries(mono_realsense_t265 ${PROJECT_NAME}) add_executable(mono_realsense_D435i Examples/Monocular/mono_realsense_D435i.cc) target_link_libraries(mono_realsense_D435i ${PROJECT_NAME}) endif() #Monocular inertial examples set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/Examples/Monocular-Inertial) add_executable(mono_inertial_euroc Examples/Monocular-Inertial/mono_inertial_euroc.cc) target_link_libraries(mono_inertial_euroc ${PROJECT_NAME}) add_executable(mono_inertial_tum_vi Examples/Monocular-Inertial/mono_inertial_tum_vi.cc) target_link_libraries(mono_inertial_tum_vi ${PROJECT_NAME}) if(realsense2_FOUND) add_executable(mono_inertial_realsense_t265 Examples/Monocular-Inertial/mono_inertial_realsense_t265.cc) target_link_libraries(mono_inertial_realsense_t265 ${PROJECT_NAME}) add_executable(mono_inertial_realsense_D435i Examples/Monocular-Inertial/mono_inertial_realsense_D435i.cc) target_link_libraries(mono_inertial_realsense_D435i ${PROJECT_NAME}) endif() #Stereo Inertial examples set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/Examples/Stereo-Inertial) add_executable(stereo_inertial_euroc Examples/Stereo-Inertial/stereo_inertial_euroc.cc) target_link_libraries(stereo_inertial_euroc ${PROJECT_NAME}) add_executable(stereo_inertial_tum_vi Examples/Stereo-Inertial/stereo_inertial_tum_vi.cc) target_link_libraries(stereo_inertial_tum_vi ${PROJECT_NAME}) if(realsense2_FOUND) add_executable(stereo_inertial_realsense_t265 Examples/Stereo-Inertial/stereo_inertial_realsense_t265.cc) target_link_libraries(stereo_inertial_realsense_t265 ${PROJECT_NAME}) add_executable(stereo_inertial_realsense_D435i Examples/Stereo-Inertial/stereo_inertial_realsense_D435i.cc) target_link_libraries(stereo_inertial_realsense_D435i ${PROJECT_NAME}) endif() set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/Examples/Calibration) if(realsense2_FOUND) add_executable(recorder_realsense_D435i Examples/Calibration/recorder_realsense_D435i.cc) target_link_libraries(recorder_realsense_D435i ${PROJECT_NAME}) add_executable(recorder_realsense_T265 Examples/Calibration/recorder_realsense_T265.cc) target_link_libraries(recorder_realsense_T265 ${PROJECT_NAME}) endif() #Old examples # RGB-D examples set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/Examples_old/RGB-D) add_executable(rgbd_tum_old Examples_old/RGB-D/rgbd_tum.cc) target_link_libraries(rgbd_tum_old ${PROJECT_NAME}) if(realsense2_FOUND) add_executable(rgbd_realsense_D435i_old Examples_old/RGB-D/rgbd_realsense_D435i.cc) target_link_libraries(rgbd_realsense_D435i_old ${PROJECT_NAME}) endif() # RGB-D inertial examples set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/Examples_old/RGB-D-Inertial) if(realsense2_FOUND) add_executable(rgbd_inertial_realsense_D435i_old Examples_old/RGB-D-Inertial/rgbd_inertial_realsense_D435i.cc) target_link_libraries(rgbd_inertial_realsense_D435i_old ${PROJECT_NAME}) endif() #Stereo examples set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/Examples_old/Stereo) add_executable(stereo_kitti_old Examples_old/Stereo/stereo_kitti.cc) target_link_libraries(stereo_kitti_old ${PROJECT_NAME}) add_executable(stereo_euroc_old Examples_old/Stereo/stereo_euroc.cc) target_link_libraries(stereo_euroc_old ${PROJECT_NAME}) add_executable(stereo_tum_vi_old Examples_old/Stereo/stereo_tum_vi.cc) target_link_libraries(stereo_tum_vi_old ${PROJECT_NAME}) if(realsense2_FOUND) add_executable(stereo_realsense_t265_old Examples_old/Stereo/stereo_realsense_t265.cc) target_link_libraries(stereo_realsense_t265_old ${PROJECT_NAME}) add_executable(stereo_realsense_D435i_old Examples_old/Stereo/stereo_realsense_D435i.cc) target_link_libraries(stereo_realsense_D435i_old ${PROJECT_NAME}) endif() #Monocular examples set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/Examples_old/Monocular) add_executable(mono_tum_old Examples_old/Monocular/mono_tum.cc) target_link_libraries(mono_tum_old ${PROJECT_NAME}) add_executable(mono_kitti_old Examples_old/Monocular/mono_kitti.cc) target_link_libraries(mono_kitti_old ${PROJECT_NAME}) add_executable(mono_euroc_old Examples_old/Monocular/mono_euroc.cc) target_link_libraries(mono_euroc_old ${PROJECT_NAME}) add_executable(mono_tum_vi_old Examples_old/Monocular/mono_tum_vi.cc) target_link_libraries(mono_tum_vi_old ${PROJECT_NAME}) if(realsense2_FOUND) add_executable(mono_realsense_t265_old Examples_old/Monocular/mono_realsense_t265.cc) target_link_libraries(mono_realsense_t265_old ${PROJECT_NAME}) add_executable(mono_realsense_D435i_old Examples_old/Monocular/mono_realsense_D435i.cc) target_link_libraries(mono_realsense_D435i_old ${PROJECT_NAME}) endif() #Monocular inertial examples set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/Examples_old/Monocular-Inertial) add_executable(mono_inertial_euroc_old Examples_old/Monocular-Inertial/mono_inertial_euroc.cc) target_link_libraries(mono_inertial_euroc_old ${PROJECT_NAME}) add_executable(mono_inertial_tum_vi_old Examples_old/Monocular-Inertial/mono_inertial_tum_vi.cc) target_link_libraries(mono_inertial_tum_vi_old ${PROJECT_NAME}) if(realsense2_FOUND) add_executable(mono_inertial_realsense_t265_old Examples_old/Monocular-Inertial/mono_inertial_realsense_t265.cc) target_link_libraries(mono_inertial_realsense_t265_old ${PROJECT_NAME}) add_executable(mono_inertial_realsense_D435i_old Examples_old/Monocular-Inertial/mono_inertial_realsense_D435i.cc) target_link_libraries(mono_inertial_realsense_D435i_old ${PROJECT_NAME}) endif() #Stereo Inertial examples set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/Examples_old/Stereo-Inertial) add_executable(stereo_inertial_euroc_old Examples_old/Stereo-Inertial/stereo_inertial_euroc.cc) target_link_libraries(stereo_inertial_euroc_old ${PROJECT_NAME}) add_executable(stereo_inertial_tum_vi_old Examples_old/Stereo-Inertial/stereo_inertial_tum_vi.cc) target_link_libraries(stereo_inertial_tum_vi_old ${PROJECT_NAME}) if(realsense2_FOUND) add_executable(stereo_inertial_realsense_t265_old Examples_old/Stereo-Inertial/stereo_inertial_realsense_t265.cc) target_link_libraries(stereo_inertial_realsense_t265_old ${PROJECT_NAME}) add_executable(stereo_inertial_realsense_D435i_old Examples_old/Stereo-Inertial/stereo_inertial_realsense_D435i.cc) target_link_libraries(stereo_inertial_realsense_D435i_old ${PROJECT_NAME}) endif()
(2)执行编译
使用官方提供的build.sh脚本进行编译:
chmod +x build.sh
./build.sh3. 在ROS2工作空间中集成
将ORB-SLAM3库集成到ROS2 Humble环境中。
(1)创建ROS2工作空间
如果还没有专门的工作空间,请创建一个:
mkdir -p ~/orb_slam3_ws/srccd ~/orb_slam3_ws/src(2)克隆ROS2封装代码
在src目录下克隆社区提供的ROS2封装:
git clone https://github.com/benaissa-tayeb37/orb_slam3_ros2.git(3)配置与编译
返回工作空间根目录,安装ROS2依赖并编译。
cd ~/orb_slam3_ws
colcon build --symlink-install二、可能遇到的问题
1. std::bad_array_new_length
问题:
robot@ll-Lenovo:~/d7lros2/orb_slam3_ws$ ros2 run orbslam3 mono \
~/d7lros2/orb_slam3_ws/src/ORB_SLAM3_ROS2/vocabulary/ORBvoc.txt \
~/d7lros2/orb_slam3_ws/src/ORB_SLAM3_ROS2/config/monocular/TUM1.yaml
ORB-SLAM3 Copyright (C) 2017-2020 Carlos Campos, Richard Elvira, Juan J. Gómez, José M.M. Montiel and Juan D. Tardós, University of Zaragoza.
ORB-SLAM2 Copyright (C) 2014-2016 Raúl Mur-Artal, José M.M. Montiel and Juan D. Tardós, University of Zaragoza.
This program comes with ABSOLUTELY NO WARRANTY;
This is free software, and you are welcome to redistribute it
under certain conditions. See LICENSE.txt.
Input sensor was set to: Monocular
Loading ORB Vocabulary. This could take a while...
Vocabulary loaded!
Initialization of Atlas from scratch
Creation of new map with id: 0
Creation of new map with last KF id: 0
Seq. Name:
Camera Parameters:
- Camera: Pinhole
- Image scale: 1
- fx: 517.306
- fy: 516.469
- cx: 318.643
- cy: 255.314
- k1: 0.262383
- k2: -0.953104
- p1: -0.005358
- p2: 0.002628
- k3: 1.16331
- fps: 30
- color order: RGB (ignored if grayscale)
ORB Extractor Parameters:
- Number of Features: 1000
- Scale Levels: 8
- Scale Factor: 1.2
- Initial Fast Threshold: 20
- Minimum Fast Threshold: 7
There are 1 cameras in the atlas
Camera 0 is pinhole
terminate called after throwing an instance of 'std::bad_array_new_length'
what(): std::bad_array_new_length
[ros2run]: Aborted解决方法见文章:
解决:terminate called after throwing an instance of ‘std::bad_array_new_length‘ what()
2. double free or corruption (out)
问题:
robot@ll-Lenovo:~/d7lros2/orb_slam3_ws$ ros2 run orbslam3 rgbd ~/d7lros2/orb_slam3_ws/src/ORB_SLAM3_ROS2/vocabulary/ORBvoc.txt ~/d7lros2/orb_slam3_ws/src/ORB_SLAM3_ROS2/config/rgb-d/RealSense_D435i.yaml
ORB-SLAM3 Copyright (C) 2017-2020 Carlos Campos, Richard Elvira, Juan J. Gómez, José M.M. Montiel and Juan D. Tardós, University of Zaragoza.
ORB-SLAM2 Copyright (C) 2014-2016 Raúl Mur-Artal, José M.M. Montiel and Juan D. Tardós, University of Zaragoza.
This program comes with ABSOLUTELY NO WARRANTY;
This is free software, and you are welcome to redistribute it
under certain conditions. See LICENSE.txt.
Input sensor was set to: RGB-D
Loading ORB Vocabulary. This could take a while...
Vocabulary loaded!
Initialization of Atlas from scratch
Creation of new map with id: 0
Creation of new map with last KF id: 0
Seq. Name:
Camera Parameters:
- Camera: Pinhole
- Image scale: 0.5
- fx: 308.6
- fy: 308.681
- cx: 162.318
- cy: 121.231
- k1: 0
- k2: 0
- p1: 0
- p2: 0
- fps: 30
- color order: RGB (ignored if grayscale)
Depth Threshold (Close/Far Points): 2.98185
ORB Extractor Parameters:
- Number of Features: 1250
- Scale Levels: 8
- Scale Factor: 1.2
- Initial Fast Threshold: 20
- Minimum Fast Threshold: 7
There are 1 cameras in the atlas
Camera 0 is pinhole
Shutdown
Saving keyframe trajectory to KeyFrameTrajectory.txt ...
double free or corruption (out)
[ros2run]: Aborted
robot@ll-Lenovo:~/d7lros2/orb_slam3_ws$解决方法见文章:
解决:ShutdownSaving keyframe trajectory to KeyFrameTrajectory.txt ...double free or corruption
三、深度相机的配置和ORB_SLAM3建图启动
1. 相机配置文件修改
(1)获取深度相机内参
首先,查看在 ROS2 封装代码 工作空间打开终端,启动深度相机并查看深度相机内参:
终端1:
ros2 launch realsense2_camera rs_launch.py \
align_depth.enable:=true \
depth_module.depth_profile:=640x480x30 \
rgb_camera.color_profile:=640x480x30终端2:
ros2 topic echo /camera/camera/color/image_raw --once | grep -A 9 "k:"我的结果为:
wcr@wcr-desktop:~$ ros2 topic echo /camera/camera/color/image_raw --once | grep -A 9 "k:"
k:
- 615.6708984375
- 0.0
- 330.0564880371094
- 0.0
- 615.7155151367188
- 231.79380798339844
- 0.0
- 0.0
- 1.0这里得到完整的
k矩阵,现在可以确认我的实际的相机内参为:fx = 615.6708984375 fy = 615.7155151367188 cx = 330.0564880371094 cy = 231.79380798339844注意:你们的要自己按以上方法确定自己的相机参数,不能直接复用。
(2)修改配置文件相机参数
需要在 ORB_SLAM3 的 ROS2 封装代码里面设置深度相机参数,文件具体位置为:
your_ws/src/ORB_SLAM3_ROS2/config/rgb-d/d435i.yaml可以另存一个d435i_1.yaml,把上面得到的你的相机内参替换里面对应的内容:
%YAML:1.0
# 使用从 /d435i/color/camera_info 获取的真实内参
Camera.fx: 615.6708984375
Camera.fy: 615.7155151367188
Camera.cx: 330.0564880371094
Camera.cy: 231.79380798339844
# 畸变系数(示例,请用实际标定值)
Camera.k1: -0.073
Camera.k2: 0.021
Camera.p1: 0.0005
Camera.p2: -0.0003
# 正确保留 bf = fx * baseline (0.05m)
Camera.bf: 30.86
# 深度因子不变
DepthMapFactor: 1000.0
# 其他参数保持不变...2. 修改封装代码源码
需要修改的代码如下:
robot@ll-Lenovo:~/d7lros2/orb_slam3_ws/src/ORB_SLAM3_ROS2/src/rgbd$ tree
.
├── rgbd.cpp
├── rgbd-slam-node.cpp
└── rgbd-slam-node.hpp
0 directories, 3 files文件和路径可以参考上面内容。
(1)rgbd.cpp
#include <iostream>
#include <algorithm>
#include <fstream>
#include <chrono>
#include <memory>
#include "rclcpp/rclcpp.hpp"
#include "rgbd-slam-node.hpp"
#include "System.h"
int main(int argc, char **argv)
{
if(argc < 3)
{
std::cerr << "\nUsage: ros2 run orbslam rgbd path_to_vocabulary path_to_settings" << std::endl;
return 1;
}
rclcpp::init(argc, argv);
// 创建 SLAM 系统,开启可视化
bool visualization = true;
ORB_SLAM3::System SLAM(argv[1], argv[2], ORB_SLAM3::System::RGBD, visualization);
// 创建节点,传入 SLAM 系统指针和默认选项
auto node = std::make_shared<RgbdSlamNode>(&SLAM, rclcpp::NodeOptions());
std::cout << "============================ " << std::endl;
std::cout << "ORB-SLAM3 RGB-D node started. Waiting for images..." << std::endl;
// 进入 ROS 2 事件循环
rclcpp::spin(node);
// 关闭 SLAM 系统并保存轨迹
SLAM.Shutdown();
SLAM.SaveKeyFrameTrajectoryTUM("KeyFrameTrajectory.txt");
rclcpp::shutdown();
return 0;
}(2)rgbd-slam-node.cpp
#include "rgbd-slam-node.hpp"
#include <opencv2/core/core.hpp>
using std::placeholders::_1;
RgbdSlamNode::RgbdSlamNode(ORB_SLAM3::System* pSLAM, const rclcpp::NodeOptions& options)
: Node("ORB_SLAM3_ROS2", options),
m_SLAM(pSLAM)
{
// 关键修复:使用 this 指针创建 Subscriber,而非将其包装成 shared_ptr
rgb_sub = std::make_shared<message_filters::Subscriber<ImageMsg>>(this, "/camera/color/image_raw");
depth_sub = std::make_shared<message_filters::Subscriber<ImageMsg>>(this, "/camera/depth/image_rect_raw");
// 同步策略:近似时间同步,队列大小 10
syncApproximate = std::make_shared<message_filters::Synchronizer<approximate_sync_policy>>(
approximate_sync_policy(10), *rgb_sub, *depth_sub);
syncApproximate->registerCallback(&RgbdSlamNode::GrabRGBD, this);
}
RgbdSlamNode::~RgbdSlamNode()
{
// 仅执行必要的清理,不再直接调用 SLAM 系统的全局方法
// Shutdown 和轨迹保存应由主函数在节点销毁后统一处理
}
void RgbdSlamNode::GrabRGBD(const ImageMsg::SharedPtr msgRGB, const ImageMsg::SharedPtr msgD)
{
// 将 ROS 图像消息转换为 cv::Mat
cv_bridge::CvImageConstPtr cv_ptrRGB;
cv_bridge::CvImageConstPtr cv_ptrD;
try
{
cv_ptrRGB = cv_bridge::toCvShare(msgRGB);
}
catch (cv_bridge::Exception& e)
{
RCLCPP_ERROR(this->get_logger(), "cv_bridge exception (RGB): %s", e.what());
return;
}
try
{
cv_ptrD = cv_bridge::toCvShare(msgD);
}
catch (cv_bridge::Exception& e)
{
RCLCPP_ERROR(this->get_logger(), "cv_bridge exception (Depth): %s", e.what());
return;
}
// 调用 ORB-SLAM3 的 RGB-D 追踪接口
m_SLAM->TrackRGBD(cv_ptrRGB->image, cv_ptrD->image, Utility::StampToSec(msgRGB->header.stamp));
}(3)rgbd-slam-node.hpp
#ifndef __RGBD_SLAM_NODE_HPP__
#define __RGBD_SLAM_NODE_HPP__
#include <iostream>
#include <algorithm>
#include <fstream>
#include <chrono>
#include <memory>
#include "rclcpp/rclcpp.hpp"
#include "rclcpp/node_options.hpp"
#include "sensor_msgs/msg/image.hpp"
#include "message_filters/subscriber.h"
#include "message_filters/synchronizer.h"
#include "message_filters/sync_policies/approximate_time.h"
#include <cv_bridge/cv_bridge.h>
#include "System.h"
#include "Frame.h"
#include "Map.h"
#include "Tracking.h"
#include "utility.hpp"
class RgbdSlamNode : public rclcpp::Node
{
public:
explicit RgbdSlamNode(ORB_SLAM3::System* pSLAM, const rclcpp::NodeOptions& options = rclcpp::NodeOptions());
~RgbdSlamNode();
private:
using ImageMsg = sensor_msgs::msg::Image;
typedef message_filters::sync_policies::ApproximateTime<sensor_msgs::msg::Image, sensor_msgs::msg::Image> approximate_sync_policy;
void GrabRGBD(const sensor_msgs::msg::Image::SharedPtr msgRGB, const sensor_msgs::msg::Image::SharedPtr msgD);
ORB_SLAM3::System* m_SLAM;
cv_bridge::CvImageConstPtr cv_ptrRGB;
cv_bridge::CvImageConstPtr cv_ptrD;
std::shared_ptr<message_filters::Subscriber<sensor_msgs::msg::Image> > rgb_sub;
std::shared_ptr<message_filters::Subscriber<sensor_msgs::msg::Image> > depth_sub;
std::shared_ptr<message_filters::Synchronizer<approximate_sync_policy> > syncApproximate;
};
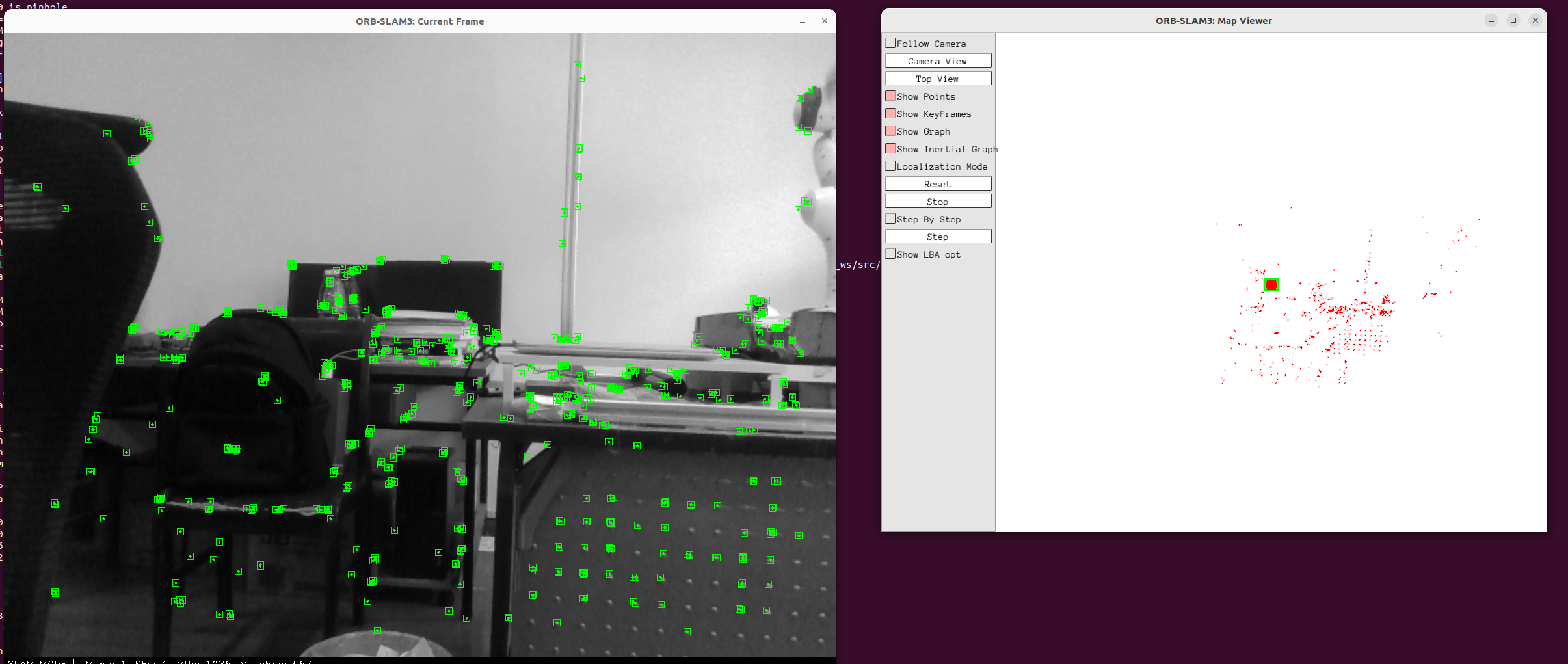
#endif3. 测试建图定位
电脑连接上D435深度相机后,在终端1中输入:
ros2 launch realsense2_camera rs_launch.py \
align_depth.enable:=true \
depth_module.depth_profile:=640x480x30 \
rgb_camera.color_profile:=640x480x30完成之前的修改后,返回工作空间目录,进行编译:
colcon buildsource install/setup.bashros2 run orbslam3 rgbd ~/d7lros2/orb_slam3_ws/src/ORB_SLAM3_ROS2/vocabulary/ORBvoc.txt ~/d7lros2/orb_slam3_ws/src/ORB_SLAM3_ROS2/config/rgbd/d435.yaml --ros-args -r /camera/color/image_raw:=/camera/camera/color/image_raw -r /camera/depth/image_rect_raw:=/camera/camera/aligned_depth_to_color/image_raw注意:
启动ORB_SLAM3要遵循官方的教程:
ros2 run orbslam3 rgbd \ <path_to_vocabulary>/ORBvoc.txt \ <path_to_config>/<camera_config>.yaml \ --ros-args \ -r /camera/color/image_raw:=<your_rgb_topic> \ -r /camera/depth/image_rect_raw:=<your_depth_topic>
ORBvoc.txt:ORB 特征词典文件路径(通常位于 ORB_SLAM3 源码的
Vocabulary/目录下)。camera_config.yaml:相机参数配置文件(如你修改后的
d435.yaml)。
--ros-args -r:ROS2 话题重映射语法。
将节点内部订阅的
/camera/color/image_raw重映射为你实际发布的 RGB 图像话题。将节点内部订阅的
/camera/depth/image_rect_raw重映射为你实际发布的深度图话题。
可以看到两个窗口均正常启动。

立足具身智能前沿赛道,致力于搭建全球化、开源化、全栈式技术交流与实践共创平台。
更多推荐

 10
10 0
0- 0



 已为社区贡献11条内容
已为社区贡献11条内容

所有评论(0)