运动控制先导课(六)——结构图简化求传递函数
上一节我们讲了如何用环节传递函数构建系统的动态结构图,反之,这一节我们来看如何用结构图简化求传递函数。
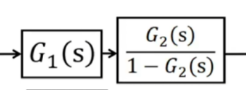
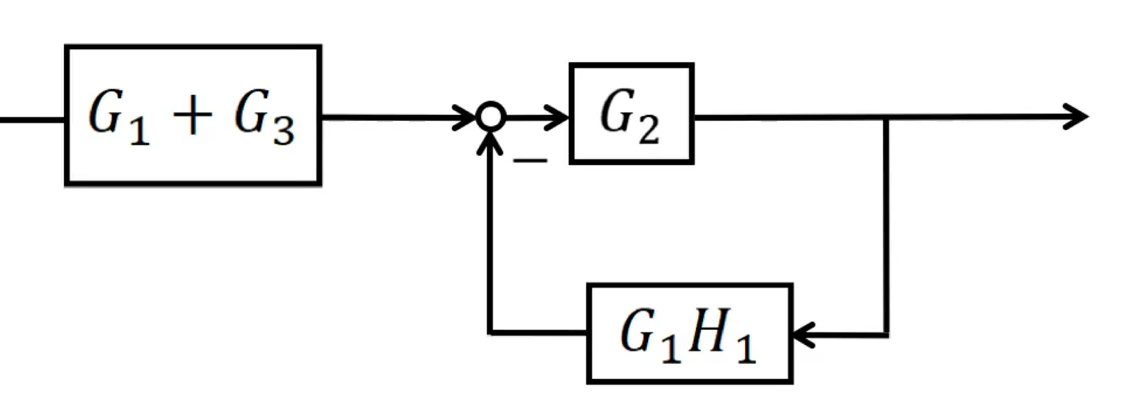
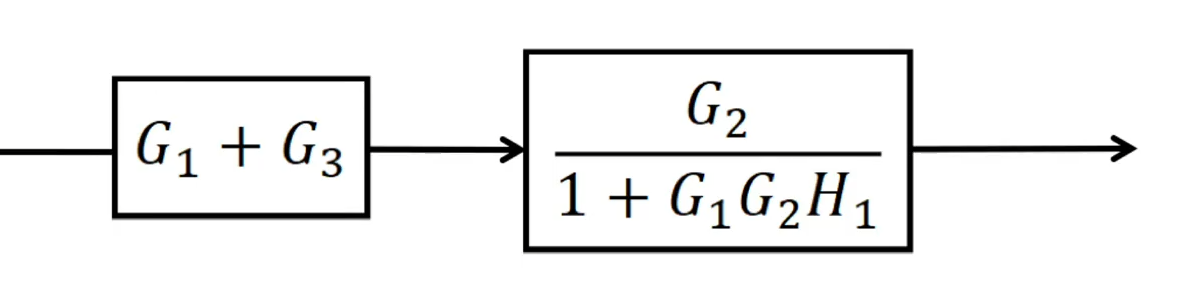
下左图明显是一张无从下手的动态结构图,尽管知道每一部分的传递函数却无法写出系统的传递函数。而有图我们一眼就能知道其传递函数。因此这一节我们讲解如何将作图化简为右图。
试想,如果能够识别出系统中哪些部分是可以化简的,就可以直接将这些部分合并,从而简化整个系统的表达式。达到结构变换,但效果等同的目的,这称为 等效变换。
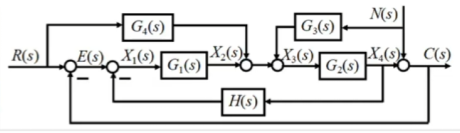
在化简前会讲一下结构图的基本形式,这样当我们面对上左图这种情况时,就能识别出哪些部分可以化简的,从而逐步转化为右图。
当然,有时候给出的结构图并不完全符合基本形式,这就需要做一些移动了,通过移动点线的位置将结构改成基本形式再化简。
因此,本节将介绍结构图的三种基本形式,接着讲如何“移动”为基本形式转换为传递函数。
回顾
回顾结构图的组成以及传递函数的概念,不记得了可以回翻第五节以及第二节。
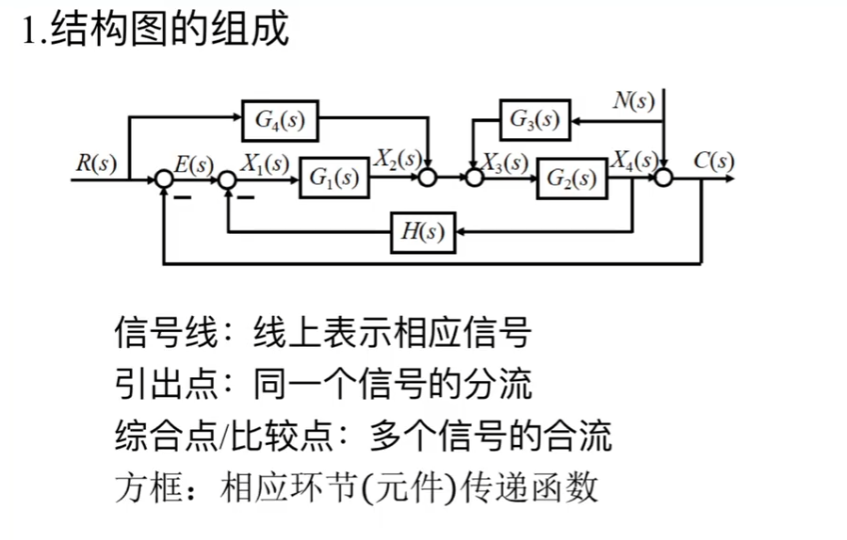
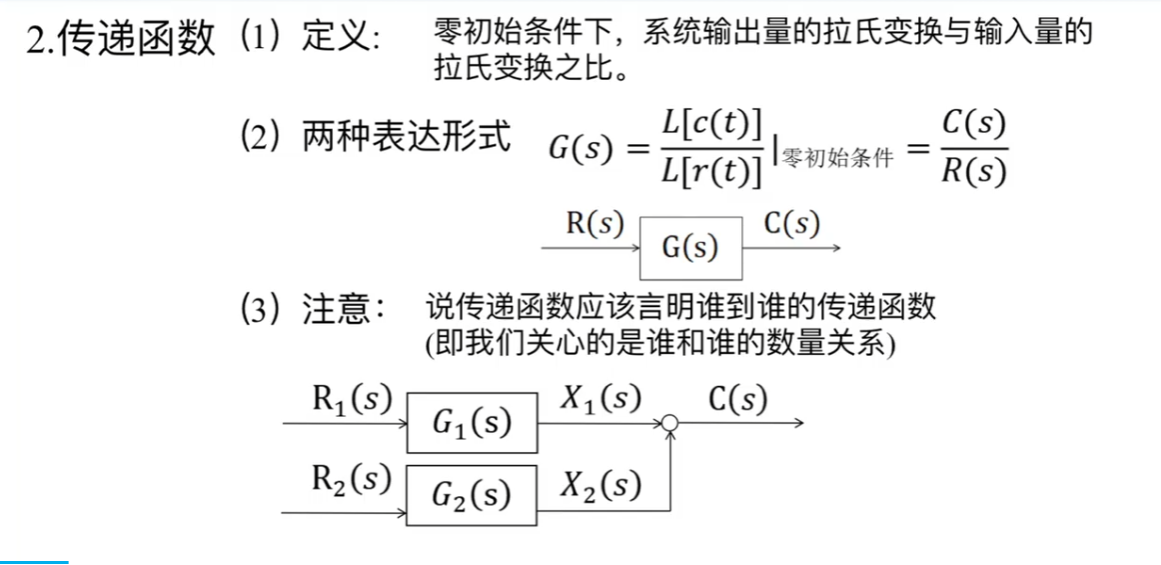
需要补充的是,传递函数有两种形式,一种是数学表达式,另一种是结构图。
结构图的优点就是可以表达信号的传递过程。
需要强调的是,传递函数需要指明是从谁到谁的传递函数,即我们关系的是谁与谁的数量关系。
比如上图,若研究R1(s)与C(s)的传递函数,那就只经历了G1(s)这个环节。
结构图的三种基本形式
动态结构图反映了传递关系,因此消去中间变量就是消去传递关系,就可以化简为整个系统的传递函数。
比如我们希望将左图化简成右图的简单形式,
就要知道哪些结构可以被化简(消去):
基本形式包括三种,串联、并联和反馈,遇到这三种形式就可以直接转换为等效传递函数了
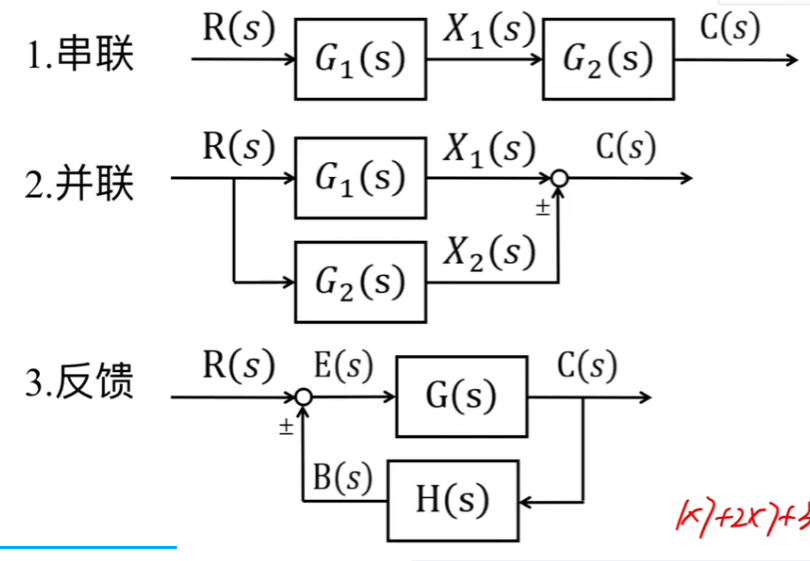
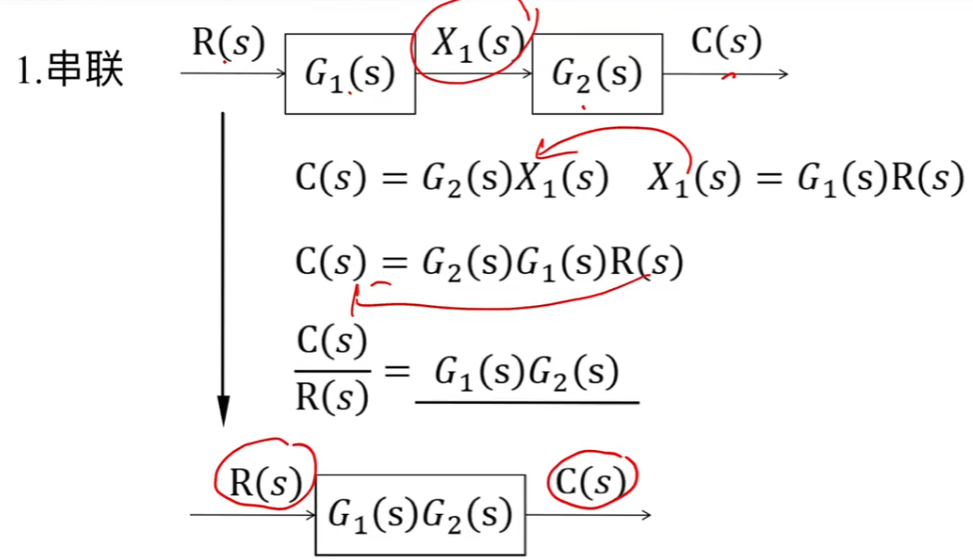
串联形式的化简:
化简的目的是将多个环节简化为单个环节,但保证效果不变。
比如串联的两个传递函数,串联的关系是:前一环节的输出作为后一环节的输入
我们先写出G1(s) G2(s)的表达式,再将G1(s)的输出作为G2(s)的输入带入G2(s),从而得到一个新的传递函数,等效于这两个环节的串联——Gn(s)=G1(s)G(2)。
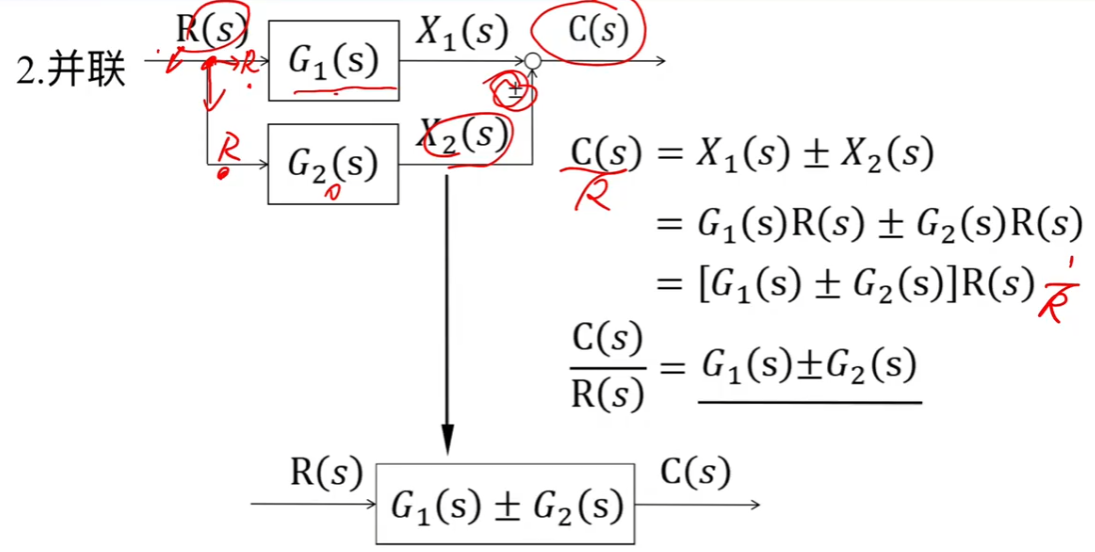
并联形式的化简:
化简的目的是将多个环节简化为单个环节,但保证效果不变。
比如并联的两个传递函数,并联的关系是:两输入环节的输出作为等效环节的输出
即X1(s)+X2(s)=C(s)。
我们先写出G1(s) G2(s)的表达式,再将G1(s)的输出加上G2(s)的输出,从而得到一个新的传递函数,等效于这两个环节的并联——Gn(s)=G1(s)±G(2)。
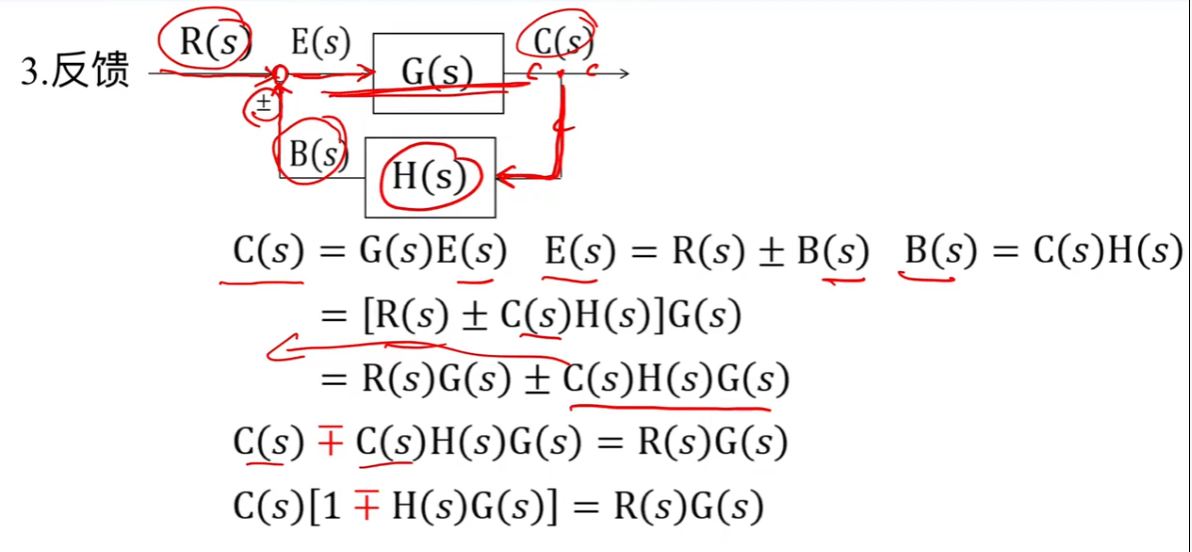
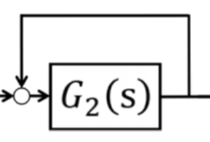
反馈形式的化简:
化简的目的是将多个环节简化为单个环节,但保证效果不变。
比如反馈环节,反馈的关系是:输出要作为输入的一部分
即E(s)=R(s)±B(s)。
我们先写出G(s) H(s)的表达式,
C(s)=G(s)E(s) B(s)=C(s)H(s)
再带入反馈表达式E(s)=R(s)±B(s),从而得到一个新的传递函数,等效于反馈环节——。
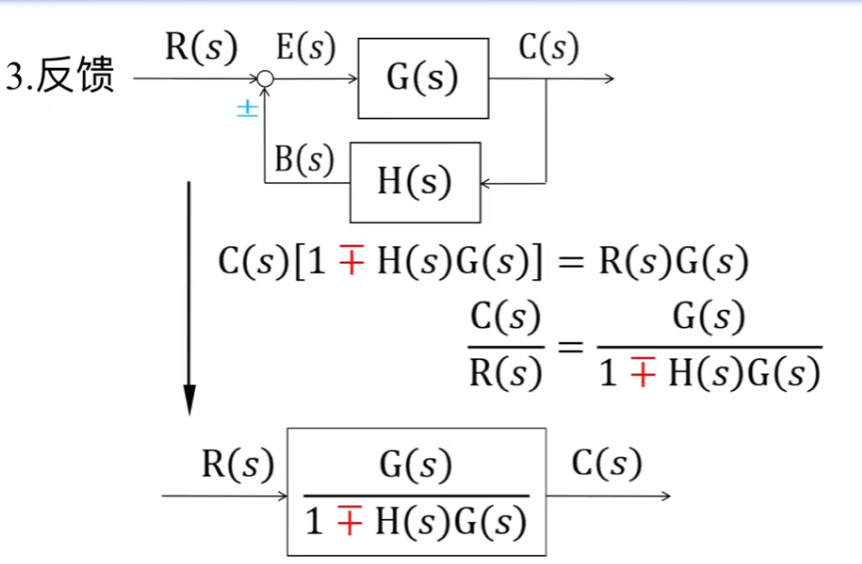
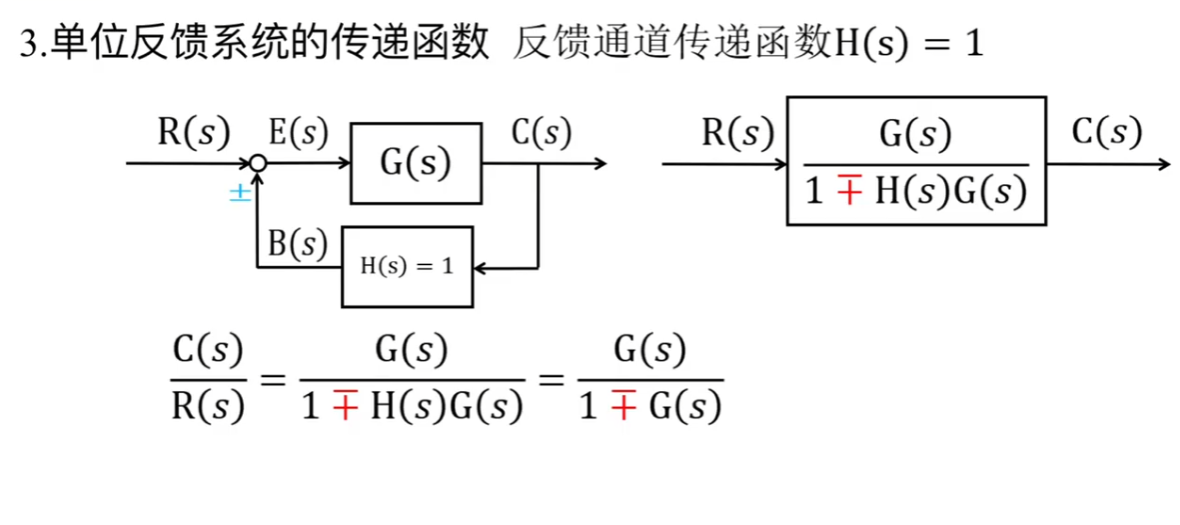
特别地,有时候反馈环节中反向传递函数为1,这时就称为单位反馈系统。
往往会忽略方框,而是直接连线到输入上。
题目:
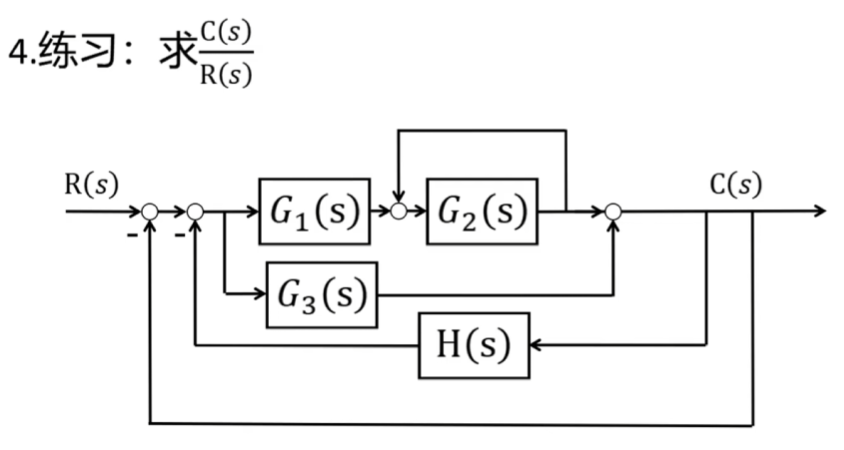
很明显是通过结构图求系统传递函数,由于没法一眼看出,就要进行结构图的化简。
第一步就是找刻在DNA中的三种基本形式,我们习惯性从内往外化简。
最里层很明显是单位反馈形式,直接套公式——
这一层很明显是串联形式,直接套公式——
这一层很明显是并联形式,直接套公式——
倒数第二层很明显是反馈形式,直接套公式——
最后一层是一个单位反馈,因此直接套公式——
β就代替上面一坨东西,得到最终的传递函数。
这道题整体就是一个脱外套的化简过程,并没有遇到非基本形式之外的结构图。
当然不是所有问题都这么友好。
结构图移动法则
如果把三个基本形式看作基本积分公式,移动法则就可以看作直接积分法、换元积分法、分部积分法这种法则,以将积分形式化为我们熟悉的积分公式再化简。
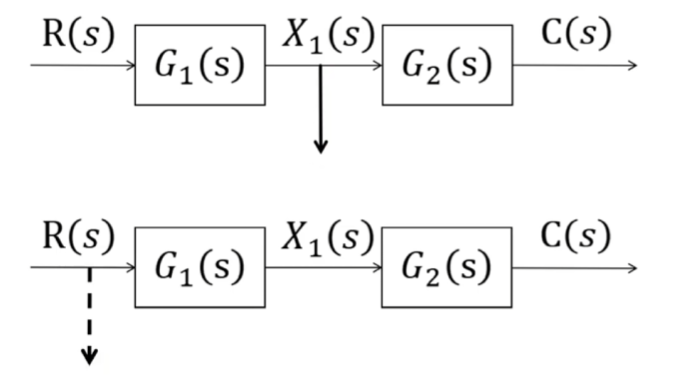
比如对于下面的结构图,我们很熟悉就是串联形式,但如果我们拿到的是上面这种在中间引出一条线的结构图,就无法用基本形式化简了,此时我们希望将这条线“扯”到G1(s)的左边,化为我们熟悉的形式转换为传递函数。
这个“扯”的过程就是“移动”。
他也有些法则——
移动法则:无论点和信号线在简化过程中如何移动,结构形式可变,但移动前后作用效果不变。
方法就是“多退少补”:
即原来经过的环节被避开了,就要在新路径添加原来的环节;
如果新路径经过了原来路径没经过的环节,则需要在新路径添加环节的“逆传递函数”。
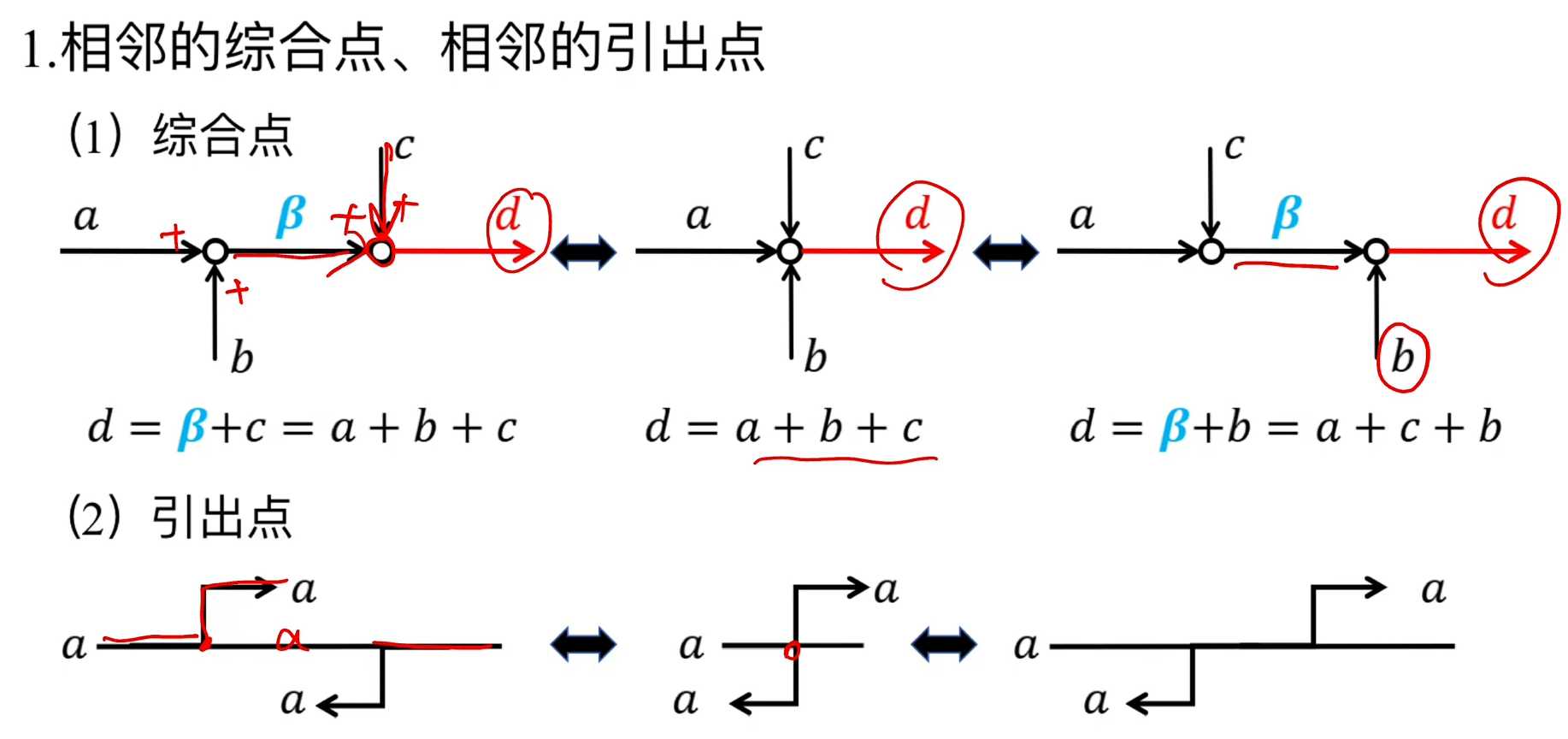
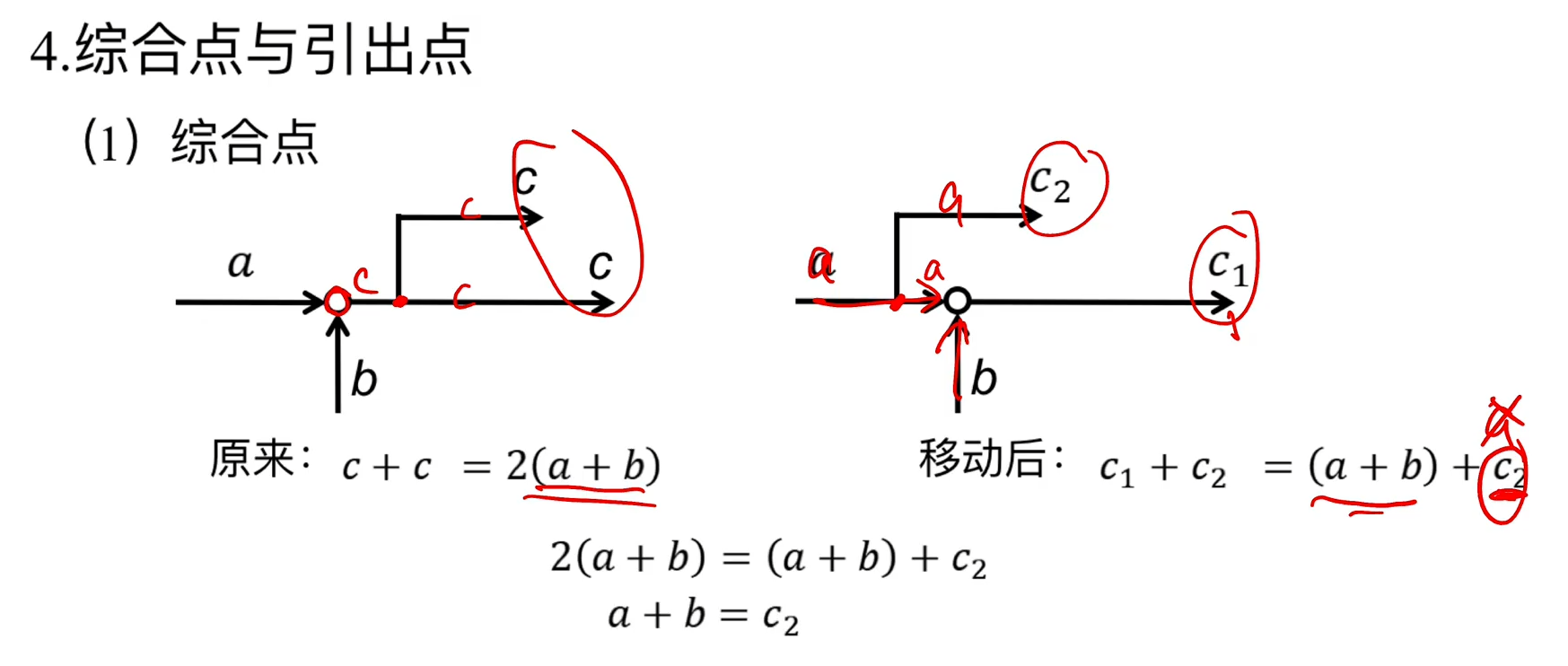
一、相邻的综合点、引出点
对于相邻的相同类型点可以随意地拆分、合并:
二、引出点相对于方框
比如开始举的例子,要将两个环节间的线“扯”到左侧环节左边。
这时就要遵循“多退少补”的原则。
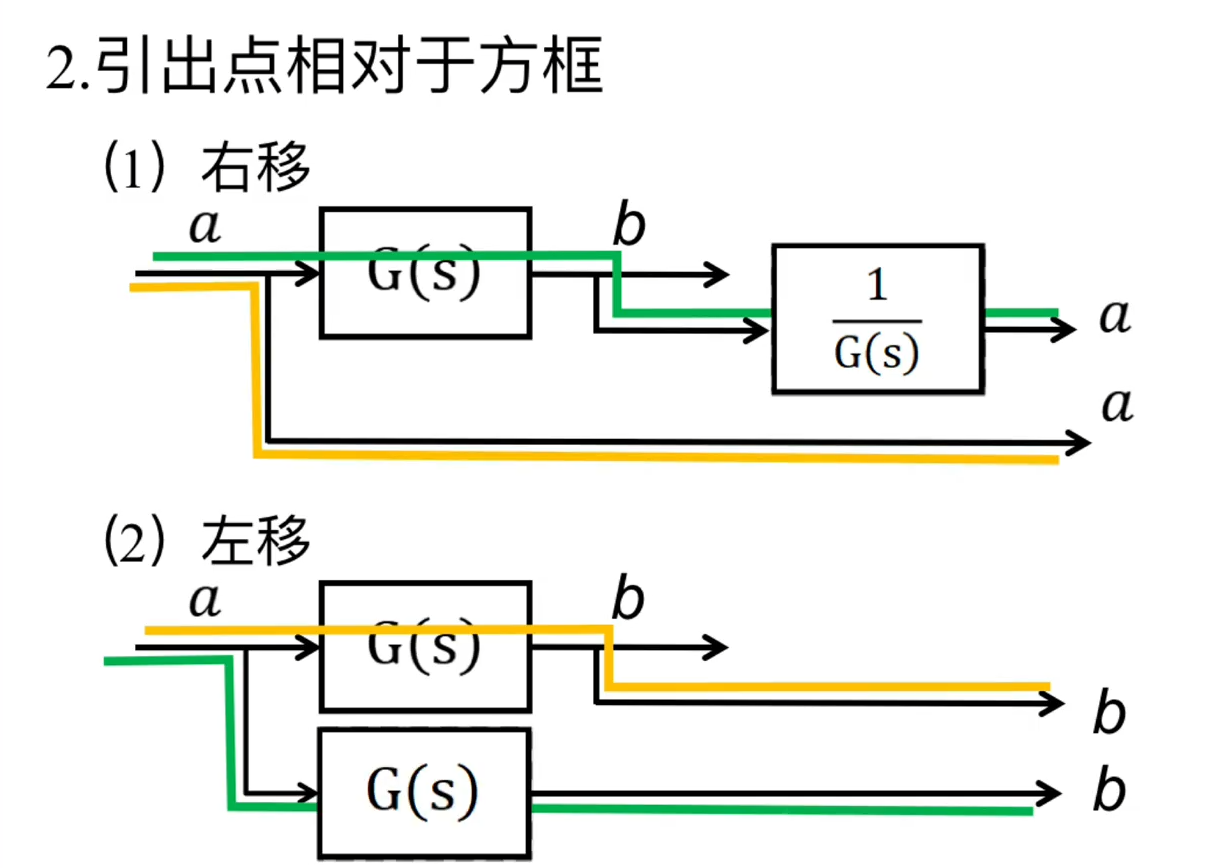
比如上图,原本的黄线什么也没经过,但绿线则多经过了G(s),因此“多退”,在新路径上添加G(s)的“逆传递函数”。
下图,原本的黄线经过了G(s),但绿线什么也没经过,因此“少补”,在新路径上添加G(s)。
三、综合点相对于方框
这时也要遵循“多退少补”的原则。
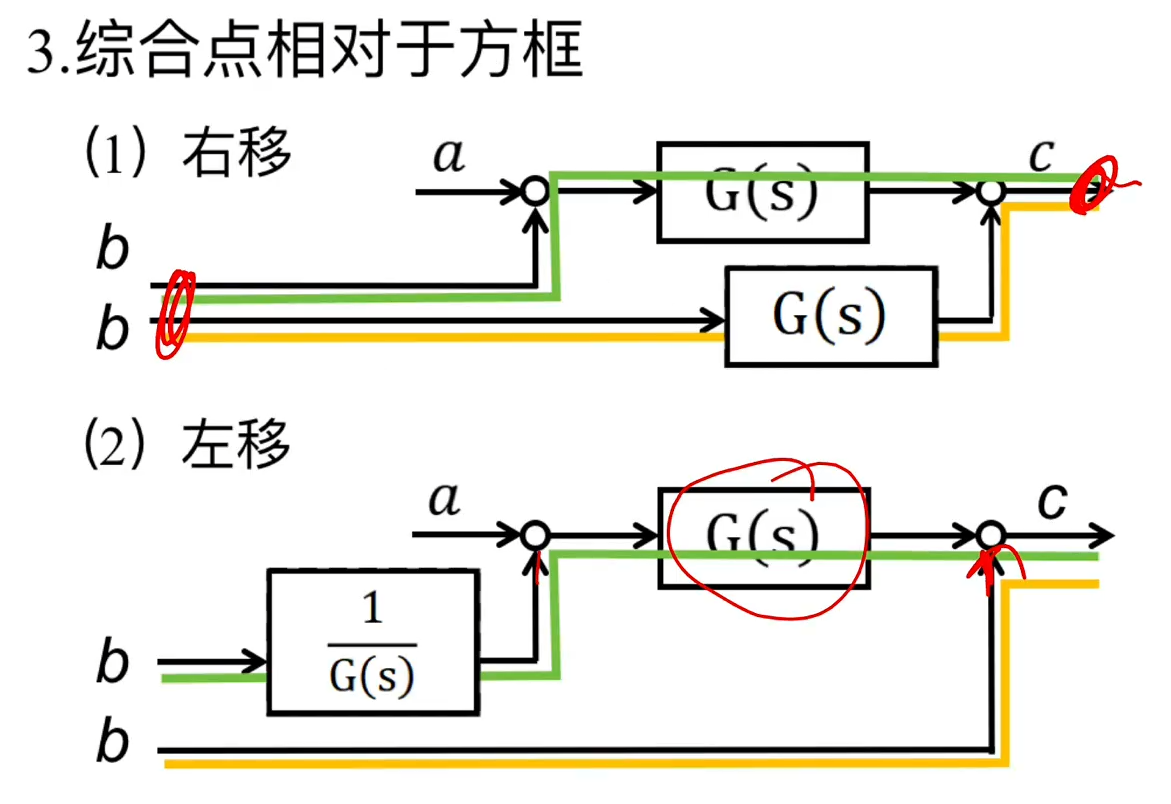
比如上图,原本的绿线经过了G(s),但黄线什么也没有经过,因此“少补”,在新路径上添加G(s)。
下图,原本的黄线什么也没有经过,但绿线则多经过了G(s),因此“多退”,在新路径上添加G(s)的“逆传递函数”。
四、综合点与引出点
通过下图,移动前后显然是不一样的,因此移动的效果非常不好,尽可能避免不同类型点之间的移动。
总结一下技巧:
相邻的点不论类型可以直接移动。
点与方框的移动遵循“多退少补”原则。
不同类型的点禁止直接移动。
正因点的移动是可选的,因此这类问题的解法往往不唯一。
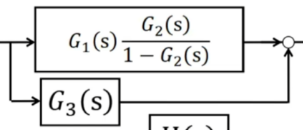
题目:
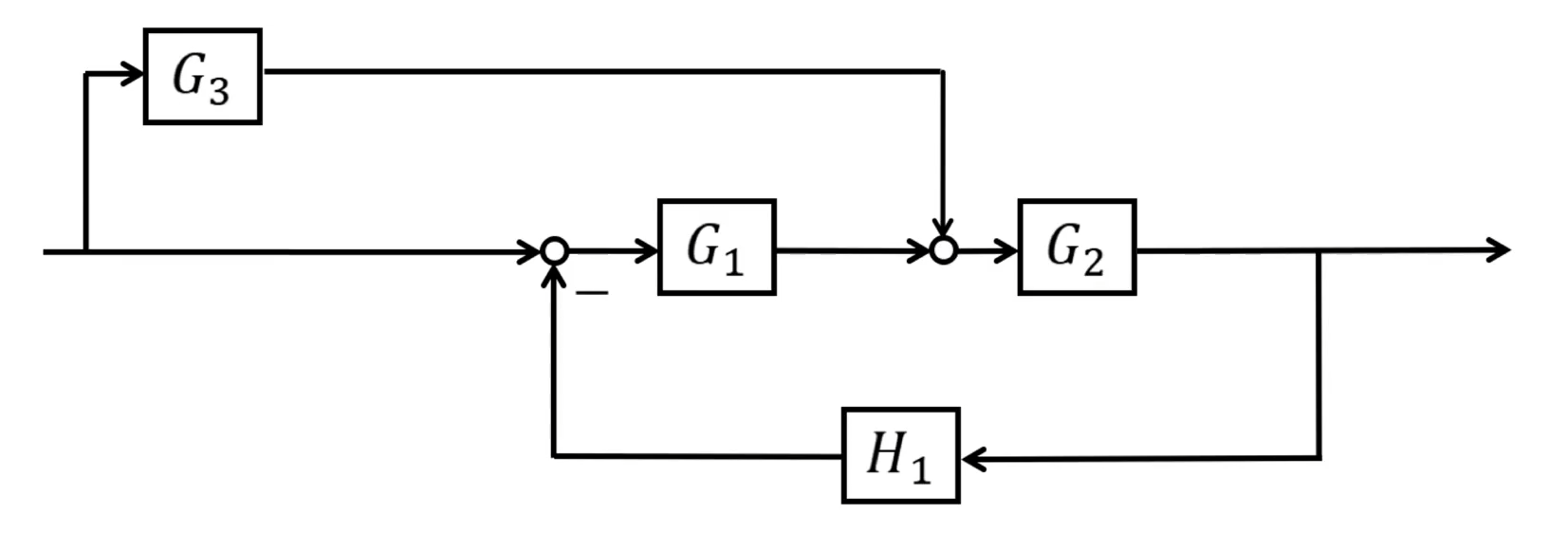
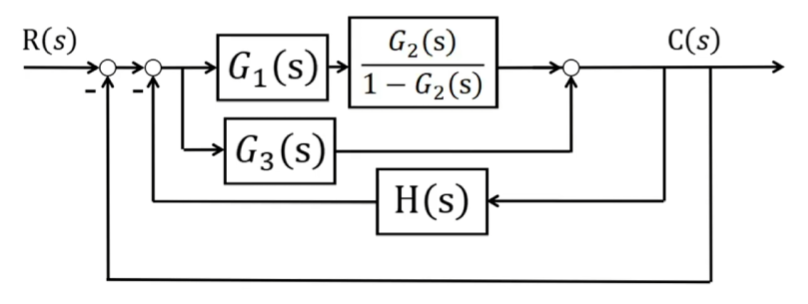
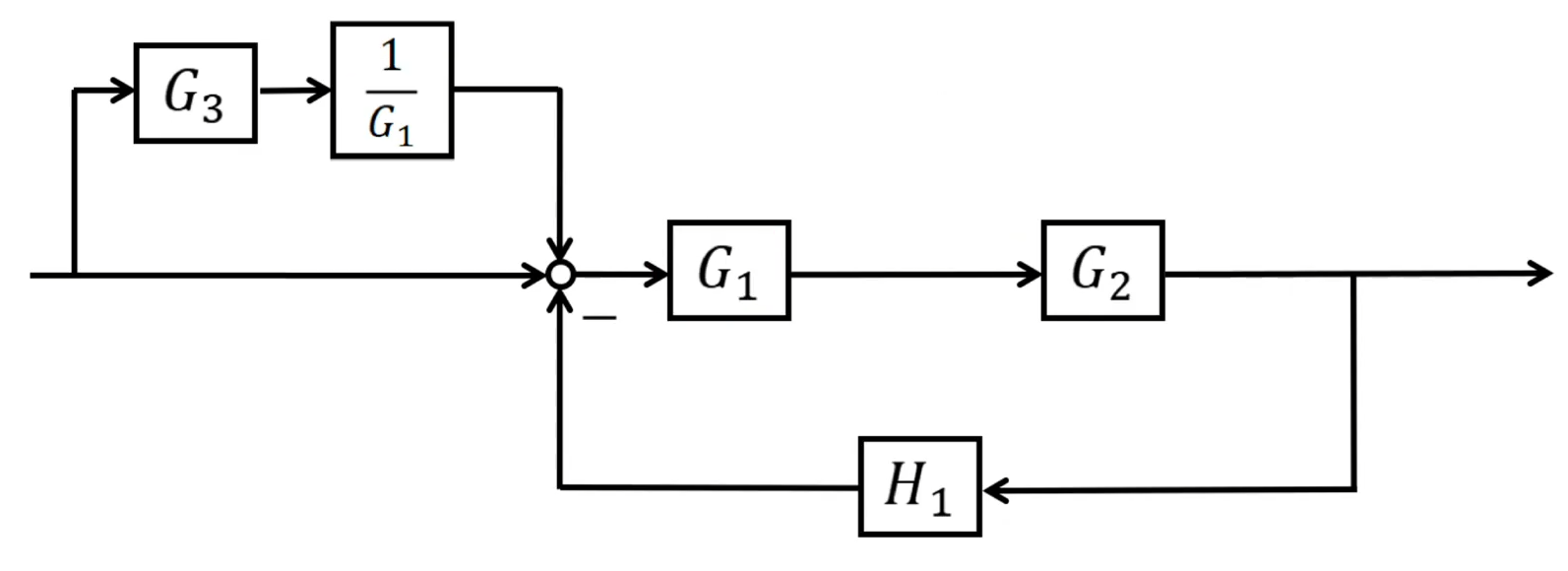
中间的G1 G2被G3的输入线分成了两半,因此考虑将这个综合点移出去。
此时面临两种选择,左移还是右移?
这个时候就要考虑我们的移动原则了,右移的时候,会出现不同类型的点需要移动的问题,工作量大,是被禁止的。
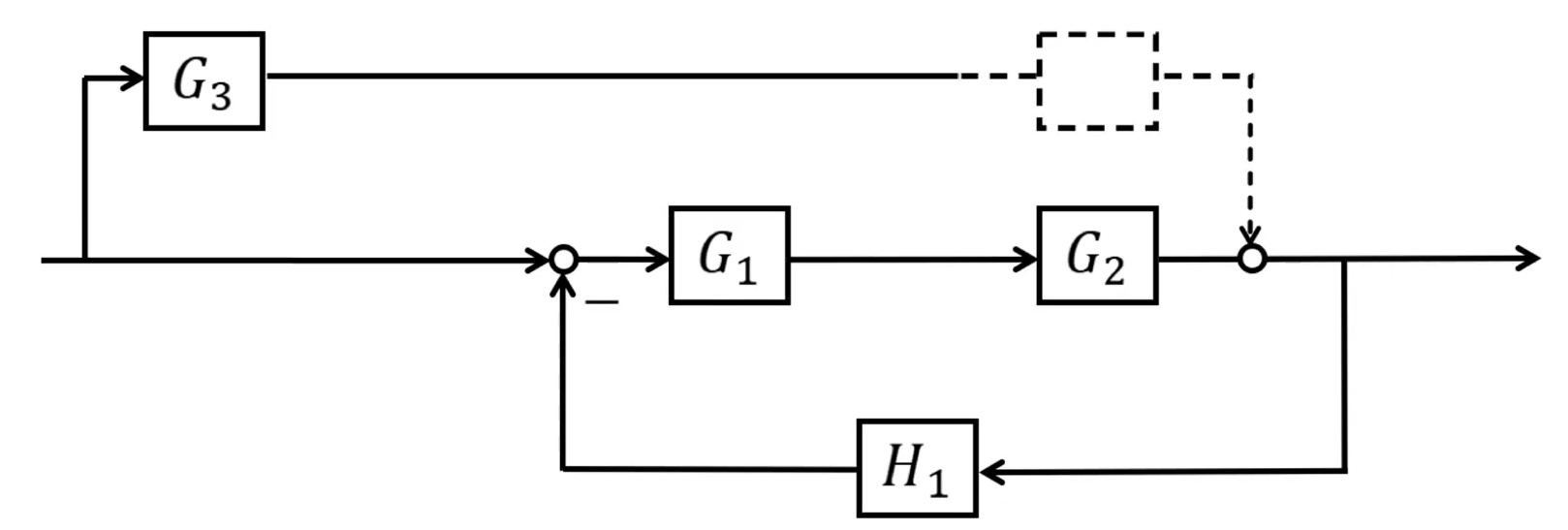
而左移则可以将两个同类型点放到一起,可以进行随意地移动。
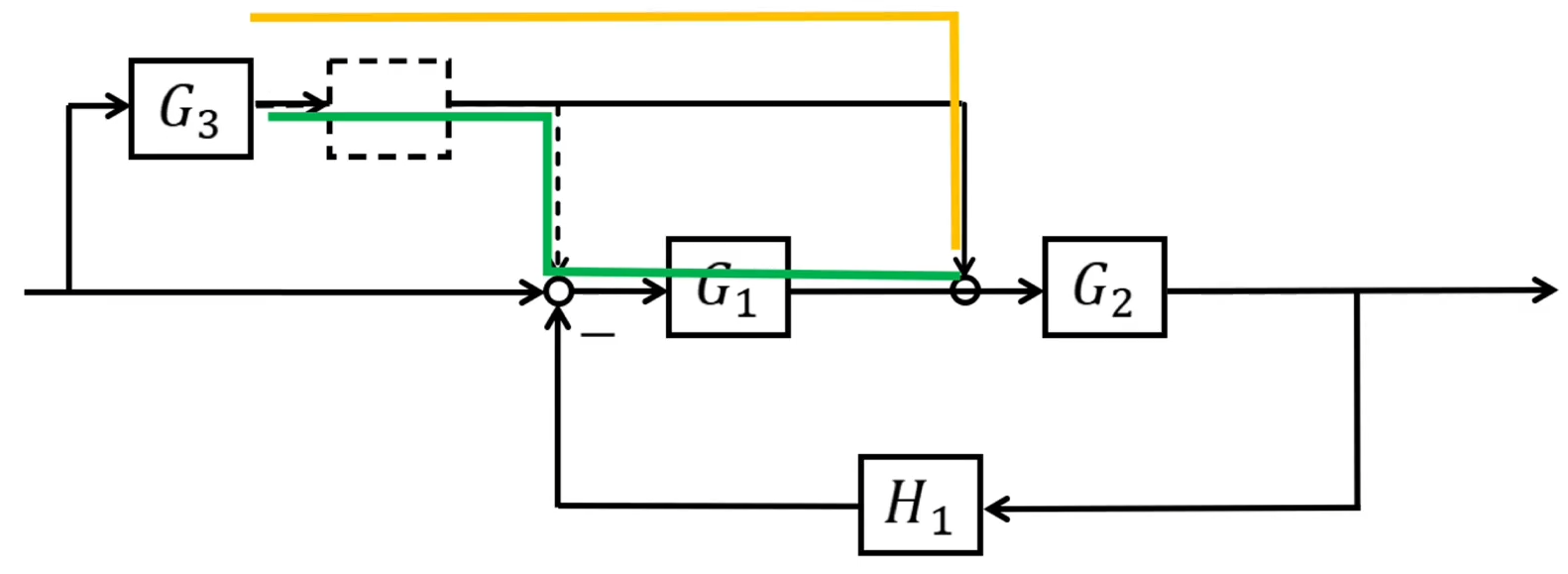
应用综合点相对于方框的移动原则,原先黄线啥也没经过,现在绿线到达同样的位置则多经过了G1,因此“多退”,在新路径添加G1的“逆传递函数”。
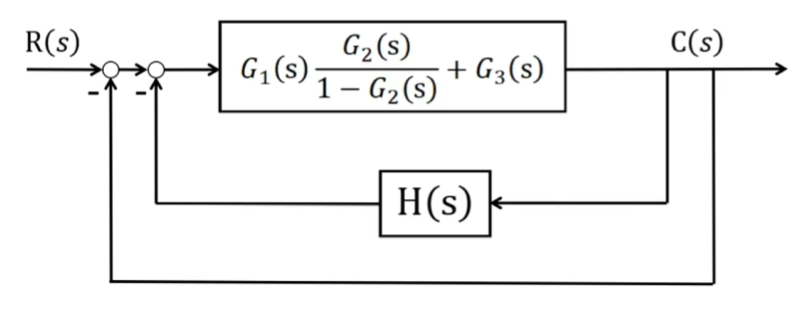
接下来就可以应用基本形式的传递函数转换了:
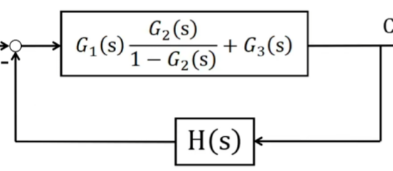
先对串联环节进行合并
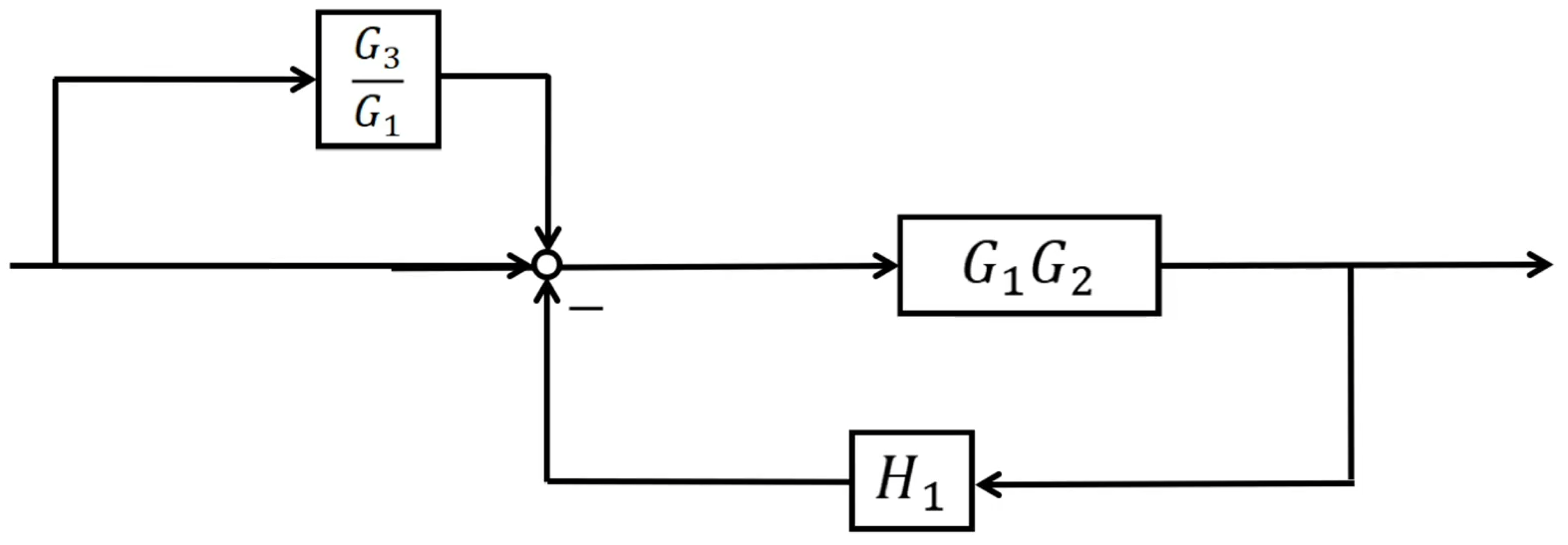
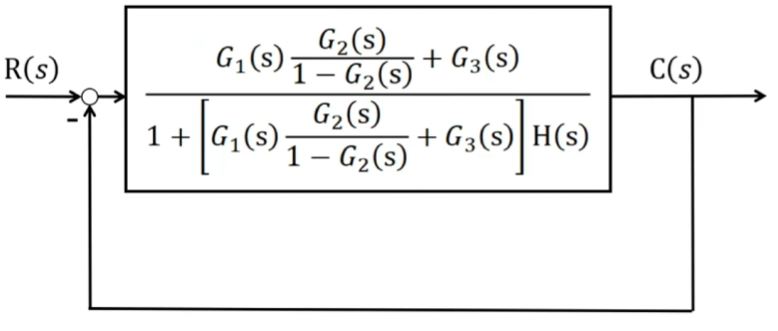
再对反馈环节进行合并

得到输出
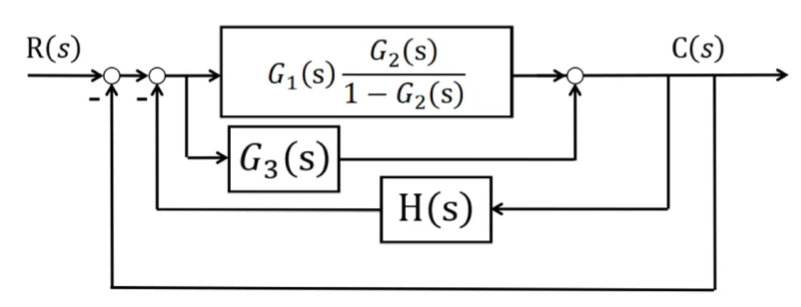
由于移动的可选性,因此也可以通过移动G1左侧的综合点完成: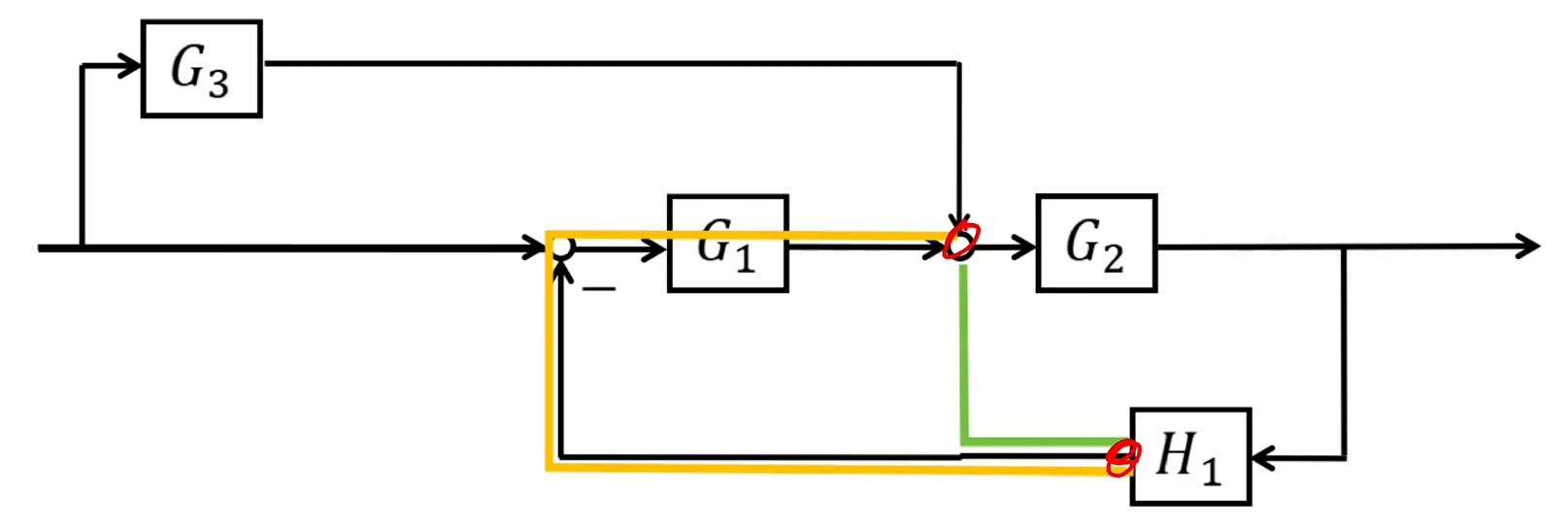
应用综合点相对于方框的移动原则,原先黄线经过了G1,现在绿线到达同样的位置则啥也没经过,因此“少补”,在新路径添加G1。
接下来就可以应用基本形式的传递函数转换了:
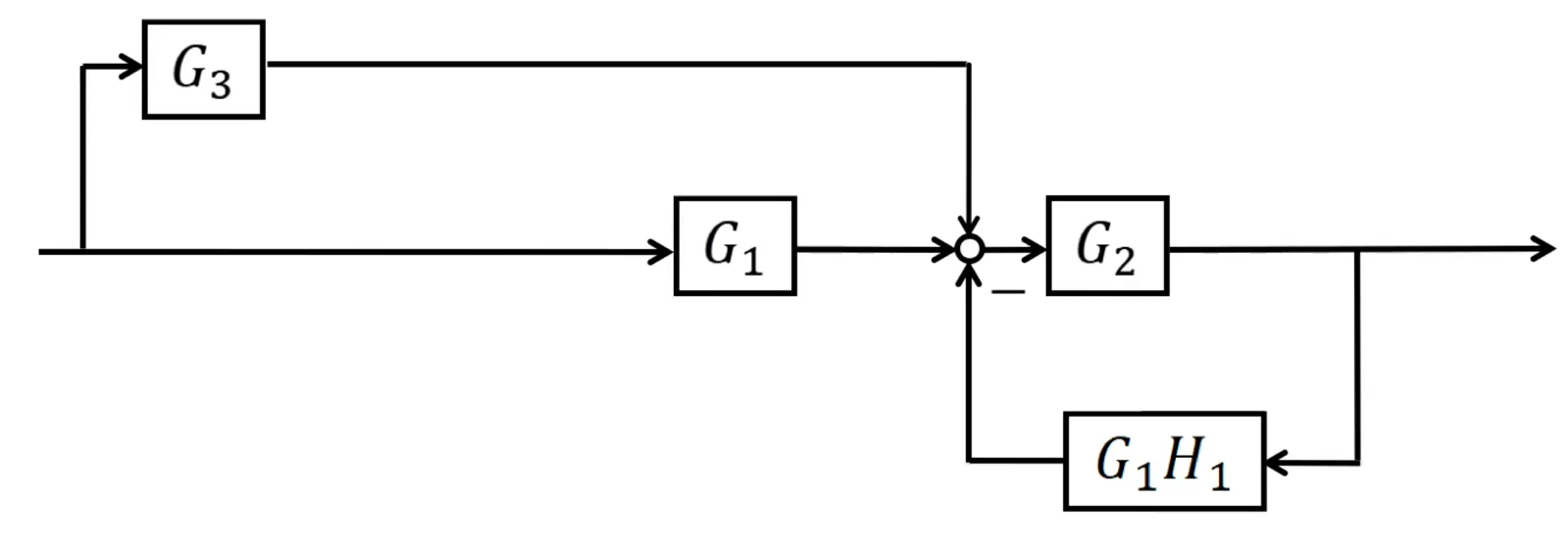
先对并联环节进行合并
再对反馈环节合并
得到输出
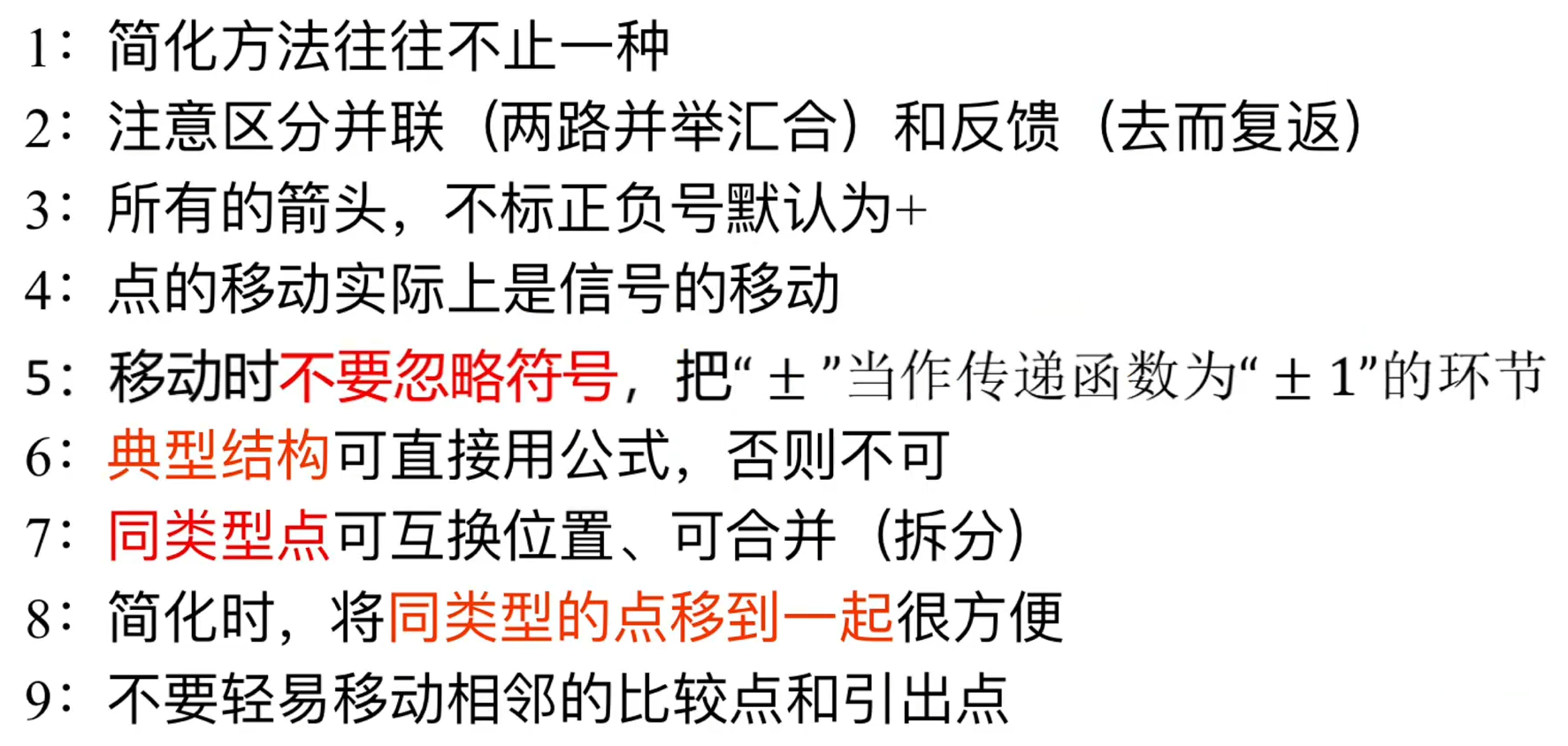
注意:
习题集
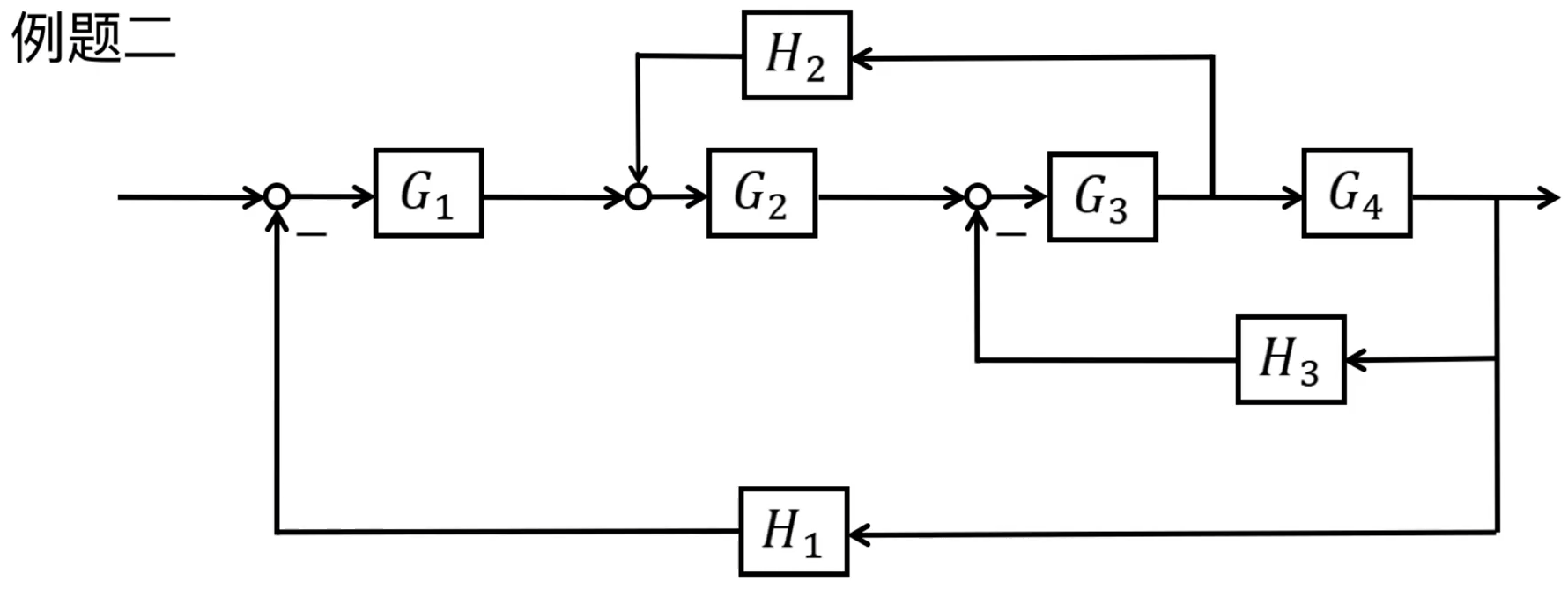
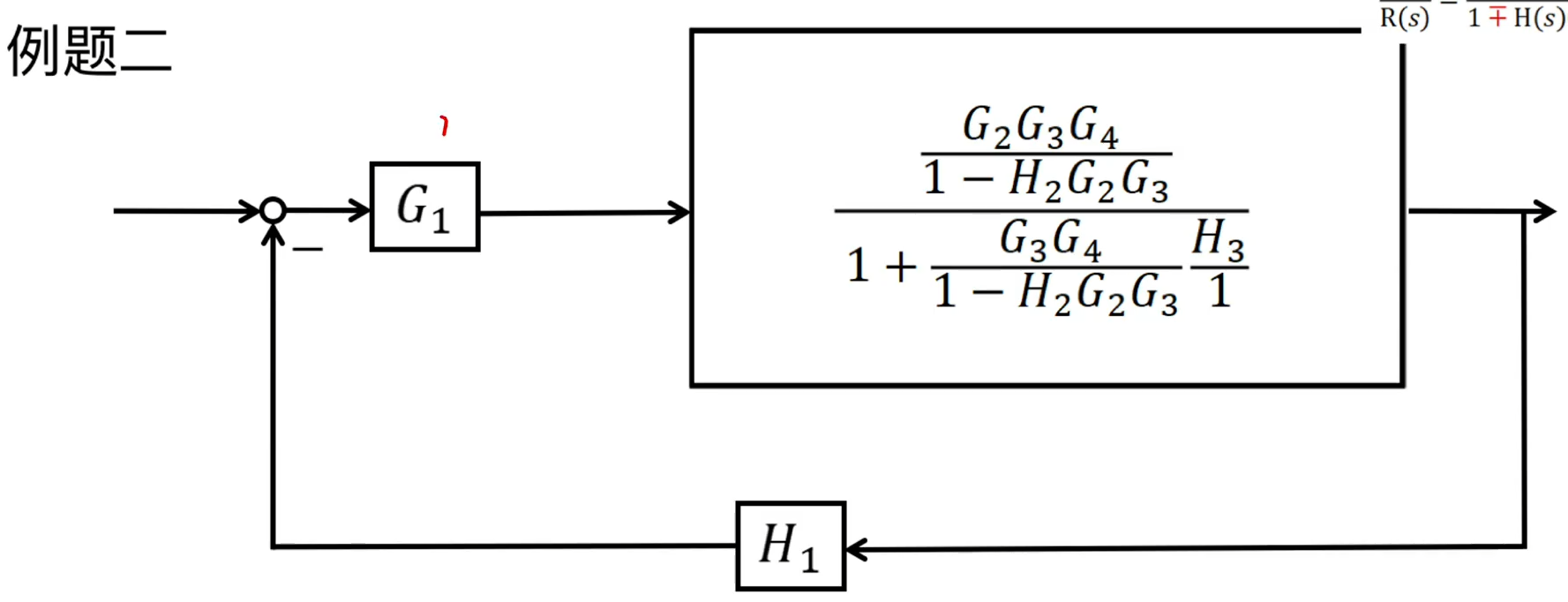
例二:
例二答案:

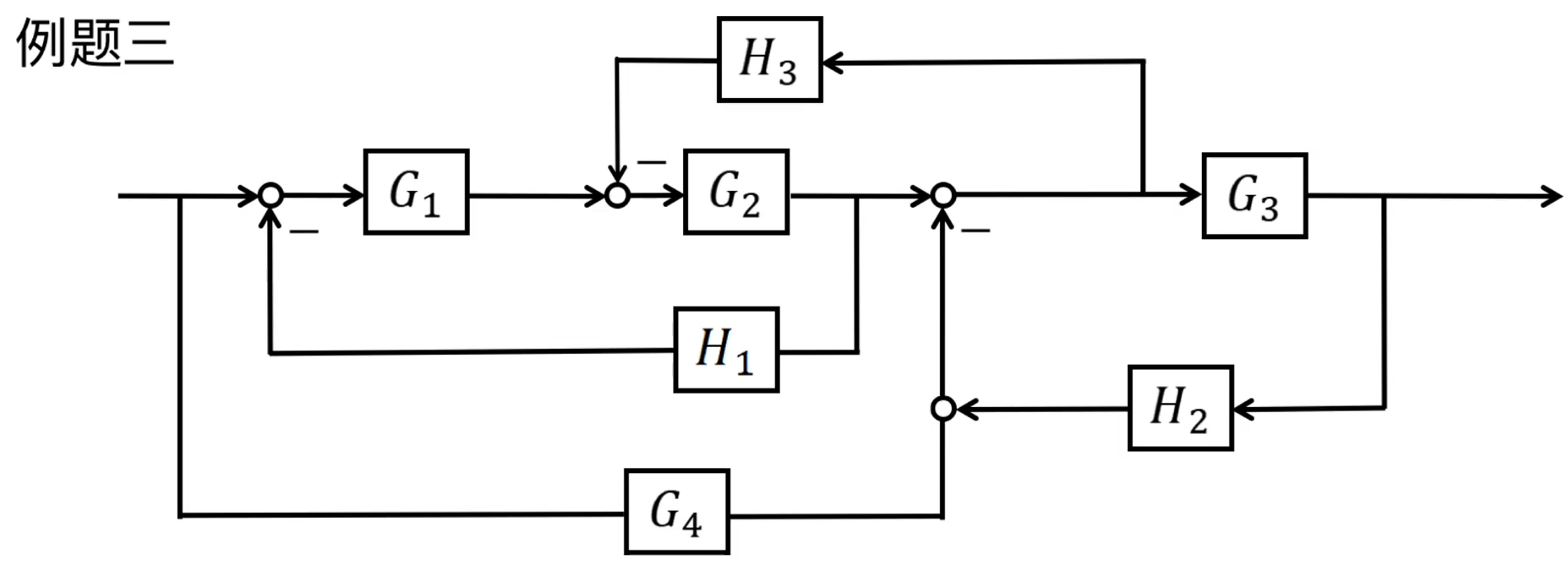
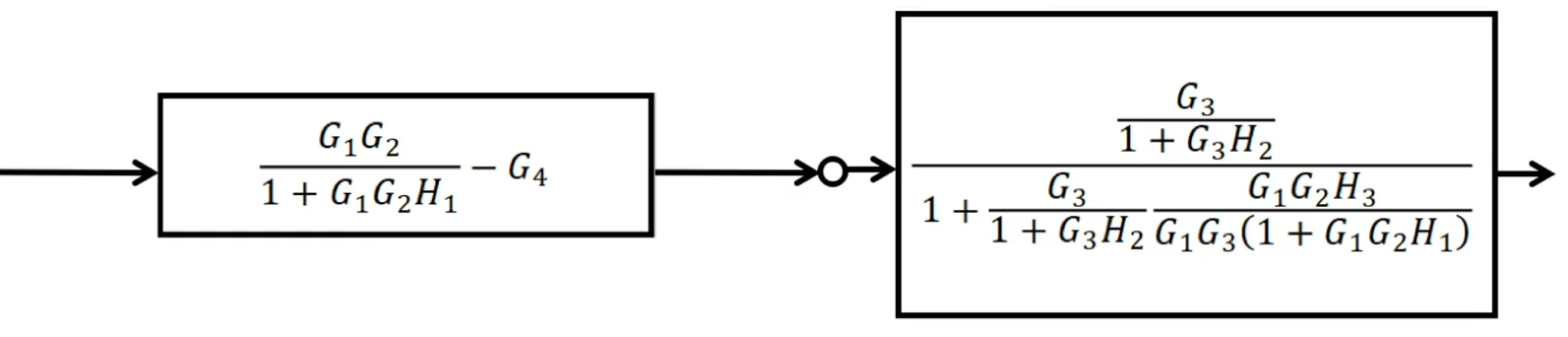
例三:
例三答案:

小结
一开始为什么要讲三个基本公式,是希望能在复杂的动态结构图中识别出能化简的部分,直接写出传递函数。
然后并非所有结构图都可以一眼得到基本形式,有些需要通过移动法则来化简,移动法则分为四种情况,总的来说:
相邻的点不论类型可以直接移动。
点与方框的移动遵循“多退少补”原则。
不同类型的点禁止直接移动。
有了这些技巧,我们就可以讲复杂的动态结构图转化为传递函数了!
至此,将系统传递函数拆分为典型环节再转化为动态结构图,以及反向将动态结构图转化为系统传递函数我们都掌握了!
写在后面:
很开心你能耐着性子读到这里,很荣幸能将我的三脚猫知识分享给大家。
星马也是小白,因此更懂小白的心思。这篇文章也还有很多不足之处,或是纰漏,希望你发现了及时在评论区提醒我呀~
(人工智能学院就是每周四五天满课的啦,最近期中考试,更新基本随缘~)
别丢收藏夹吃灰啦好嘛~
星马是刚入门的大菜比,有错望指正,有项目可以带带我。

立足具身智能前沿赛道,致力于搭建全球化、开源化、全栈式技术交流与实践共创平台。
更多推荐

 22
22 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)