【2026 DroneScan-YOLO:用于无人机图像中小目标检测的冗余感知轻量化检测】
论文摘要 本文提出DroneScan-YOLO,一种针对无人机图像中小目标检测的轻量化解决方案。针对VisDrone2019-DET数据集中68%的小目标(<32×32像素)检测难题,该方法通过四个关键创新实现突破:1)将输入分辨率提升至1280×1280以增强小目标细节;2)设计RPA-Block动态修剪冗余滤波器;3)引入轻量级MSFD分支(仅增加1.1%参数)实现步幅4的精细检测;4)
DroneScan-YOLO:用于无人机图像中小目标检测的冗余感知轻量化检测论文解读
论文基本信息
英文标题: DroneScan-YOLO: Redundancy-Aware Lightweight Detection for Tiny Objects in UAV Imagery
中文标题: DroneScan-YOLO:用于无人机图像中小目标检测的冗余感知轻量化检测
arXiv链接: https://arxiv.org/abs/2604.13278
代码链接: https://github.com/yannbellec/dronescan-yolo
提交日期: 2026年4月14日
论文状态: 12页,10张图表
1. 摘要分析
核心研究问题
无人机(UAV)图像中的空中目标检测面临着独特的挑战,主要包括三个相互关联的问题:小目标的高普遍性、恶劣的环境条件以及严格的计算约束。在VisDrone2019-DET数据集中,68%的标注实例占用少于32×32像素。标准基于YOLO的检测器无法同时解决这些问题:它们的最小检测步幅为8像素,使得子32像素对象几乎无法检测;它们的CIoU损失对非重叠的小边界框产生零梯度;它们的架构包含显著的滤波器冗余。
核心方法
论文提出了DroneScan-YOLO,这是一个通过四个协调的设计选择来解决这些限制的整体系统贡献:
- 增强的输入分辨率:提高到1280×1280,最大化小目标的空间细节
- RPA-Block:基于懒惰余弦相似度更新的动态滤波器修剪机制,具有10个epoch的预热期
- MSFD:轻量级P2检测分支,步幅为4,仅增加114,592个参数(+1.1%)
- SAL-NWD:混合损失,将标准化Wasserstein距离与大小自适应CIoU权重结合,集成到YOLOv8的TaskAligned分配管道中
主要贡献
在VisDrone2019-DET上评估,DroneScan-YOLO实现了55.3% mAP@50和35.6% mAP@50-95,分别超过YOLOv8s基准+16.6和+12.3点,召回率从0.374提高到0.518,仅增加+4.1%参数同时保持96.7 FPS推理速度。在小目标类别上的提升最为显著:bicycle AP@50从0.114提高到0.328(+187%),awning-tricycle从0.156提高到0.237(+52%)。
2. 研究现状
2.1 无人机图像检测的发展
传统方法的局限: 无人机和无人驾驶飞行器在行业中的使用越来越广泛,包括监控、交通监控、搜索救援、农业检查和边境安全。从无人机摄像头进行实时目标检测的性能是这些应用的主要问题。尽管深度学习取得了许多重大进展,但在无人机成像中仍然存在某些重要限制。
YOLO系列的演进: 目标检测通过深度学习从两阶段架构(R-CNN及其变体)发展到YOLO系列的单阶段实时检测器。YOLOv8代表了这一系列的最先进技术,具有解耦的检测头、无锚点设计和优化的CSP骨干,在COCO上以高推理速度达到竞争性能。然而,其最小检测步幅为8像素,在目标非常小的UAV场景中构成了重要限制。
2.2 现有方法的局限性
现有研究的不足: 当前文献单独解决这些问题。YOLO-LE增加了架构效率但没有改进损失。DAU-YOLO通过注意力改进特征但不解决分辨率或损失。NWD为小目标提供了鲁棒的指标但不适合协同框架。没有方法明确在可操作的基础中结合输入分辨率、多尺度检测、滤波器修剪和损失函数。
小目标检测的挑战:
- 步幅限制: 在640×640图像中,8×8像素目标在P3(步幅8)上产生1×1激活,导致无法捕获可利用的上下文
- 损失不稳定性: 基于IoU的损失函数对小边界框表现出显著的失效模式:当预测和目标框不重叠时,梯度消失
- 计算效率约束: 嵌入式UAV系统在功率、内存和热耗散方面有严格约束
3. 创新点
3.1 整体架构创新
系统化设计思路: DroneScan-YOLO基于YOLOv8s骨干网络(9.84M参数,640×640时23.6 GFLOPs),并在三个额外维度进行扩展。RPA-Block在骨干提取层的第2层(64通道,P2)和第4层(128通道,P3)通过前向钩子实现。MSFD在颈部作为额外的P2检测分支实现。SAL-NWD替换v8DetectionLoss标准的BboxLoss组件。训练在1280×1280像素下进行,将特征图的空间分辨率提高了四倍,总参数开销为+400,080(+4.1%)。
3.2 增强的分辨率
创新设计: 从640×640切换到1280×1280像素是一个根本性的架构选择。在640px时,8×8像素目标在P3(步幅8)上产生1×1激活。在1280px时,同一目标在P3上产生2×2激活,在MSFD引入的新P2头(步幅4)上产生4×4激活。
可行性保障: 这种分辨率增加通过MSFD中的轻量级可分离卷积和RPA-Block减少高分辨率层的计算冗余而变得实用。
3.3 RPA-Block(冗余感知修剪块)
创新机制: 标准卷积层累积收敛到非常相似特征检测器的冗余滤波器,增加了计算成本而没有改善表示能力。RPA-Block在训练期间识别并动态抑制这些冗余滤波器。
技术实现:
- 对于具有权重张量W的卷积层,计算滤波器之间的余弦相似度矩阵
- 通过扫描相似度矩阵的上三角导出二进制掩码:对于每对(i,j),如果Sij > θ,滤波器j被掩码
- 引入两个稳定化机制:(1)W=10个epoch的预热期,在此期间m=1,允许滤波器在学习修剪激活之前学习多样化表示;(2)懒惰更新每N=5个epoch重新计算m,将重新计算开销减少5×,同时达到等效的最终稀疏度
3.4 MSFD(多尺度特征蒸馏头)
问题解决: 在1280px时,8×8像素目标在P3上仅产生2×2激活,不足以进行精确的空间定位。MSFD实现在P2上以步幅4操作的专用检测分支,对于1280px输入,特征为320×320。
轻量化设计:
- MSFD分支通过两个深度可分离卷积块处理P2特征(64通道),与标准卷积相比减少FLOPs约8-9倍
- 挤压激励块通过全局池化、两个全连接层(缩减比r=4)和sigmoid乘法重新校准通道重要性
- 总成本:114,592个参数(+1.1%)
3.5 SAL-NWD损失(大小自适应标准化NWD损失)
问题识别: CIoU对非重叠的小边界框产生零梯度。SAL-NWD通过两个协同组件解决这个问题。
标准化Wasserstein距离:
- 每个边界框建模为二维高斯分布N(μ,Σ)
- 计算Wasserstein-2距离的平方
- 标准化NWD:NWD(a,b) = exp(-√W²(a,b)/C),其中C=12.8
- NWD损失:L_NWD = 1 - NWD(a,b),即使IoU=0也严格为正
大小自适应权重:
- CIoU通过对象面积的倒数重新加权:w_i = 1/(A_i + ε)
- 混合损失:L_SAL-NWD = λ·L_NWD + (1-λ)·L_CIoU·w̄
- 其中λ=0.5,w̄是批次中正锚点的平均大小自适应权重
4. 数据集对比分析
4.1 VisDrone2019-DET数据集概述
数据规模:
- 训练图像:6,471张
- 验证图像:548张
- 测试图像:1,610张
- 总标注实例:471,266个
数据特点:
- 跨越14个中国城市收集的大规模UAV基准
- 具有强烈变化的气象、地形和光照条件
- 包含10个类别的标注实例:行人、人群、自行车、汽车、货车、卡车、三轮车、遮阳三轮车、公交车和摩托车
小目标主导:
- 在该数据集中,68%的对象占用少于32×32像素
- 这为小目标检测算法提出了巨大挑战
4.2 数据集统计特征
图表分析:
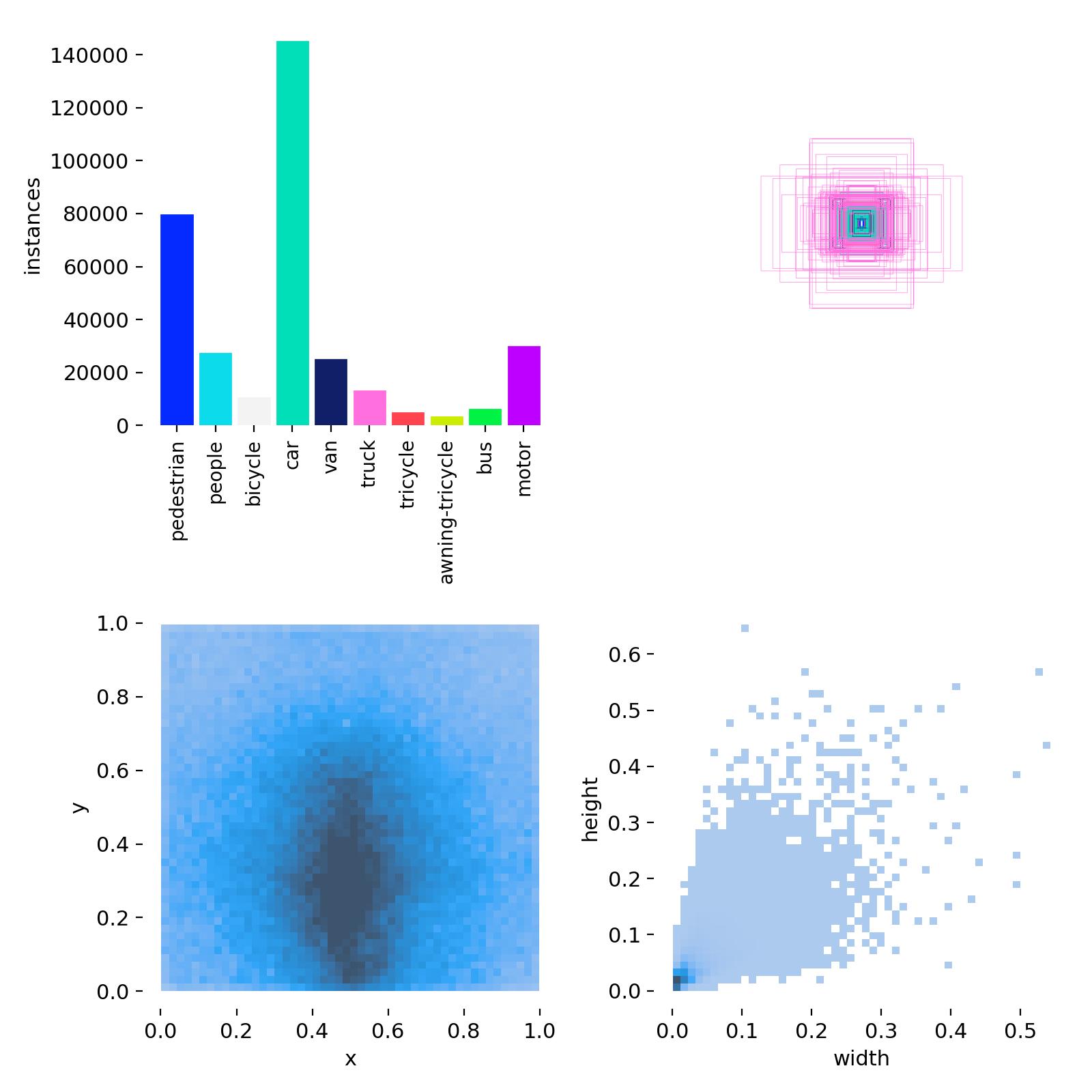
图2展示了VisDrone2019-DET训练集的详细统计信息:
1. 类别分布(左上):
- 汽车实例占主导地位
- 小目标类别相对稀少
- 这种类别不平衡对检测算法提出了挑战
2. 边界框锚点(右上):
- 显示了训练集中的边界框尺寸分布
- 大部分锚点集中在小尺寸范围
- 为anchor设计提供了参考
3. 对象中心的空间分布(左下):
- 由于UAV拍摄角度,对象中心集中在图像中心附近
- 这种分布特征影响了检测策略的设计
4. 边界框大小分布(右下):
- 确认了子32px对象的普遍性(宽度和高度<0.1在归一化坐标中)
- 为小目标检测问题的严重性提供了量化证据
数据集意义:
- 为UAV目标检测提供了标准化基准
- 反映了真实世界的挑战:变化的天气、地形、光照
- 小目标的高比例为算法设计提供了明确方向
4.3 数据集挑战与应对
主要挑战:
- 小目标密度高:68%对象<32×32像素
- 环境变化大:多种天气、地形、光照条件
- 类别不平衡:某些类别样本稀少
- 遮挡问题:密集场景中的相互遮挡
DroneScan-YOLO的应对策略:
- 通过1280×1280分辨率增强小目标检测
- 通过多尺度检测(MSFD)处理不同大小的目标
- 通过SAL-NWD损失解决小目标梯度消失问题
- 通过RPA-Block在保持精度的同时提高效率
5. 算法结构图与详细分析
5.1 系统整体架构
架构设计原理:
DroneScan-YOLO的系统架构体现了四个核心创新模块的协同作用:
1. 骨干网络层:
- 基于YOLOv8s,处理输入图像通过一系列卷积块
- 在第2层(64通道,P2)和第4层(128通道,P3)应用RPA-Block
- 高分辨率层产生最多的计算冗余,因此成为RPA-Block的主要目标
2. 特征金字塔网络(FPN)颈部:
- 集成MSFD作为额外的P2检测分支
- P2特征通过深度可分离卷积块处理
- P3特征上采样到P2分辨率并与P2特征融合
3. 检测头层:
- 包含传统的P3、P4、P5检测头
- 新增的MSFD P2检测头专门处理小目标
- 在检测头级别应用SAL-NWD损失
4. 分辨率增强:
- 训练分辨率从640×640提高到1280×1280
- 特征图空间分辨率提高了4倍
- 通过RPA-Block和MSFD的轻量化设计补偿计算开销
5.2 核心技术模块分析
RPA-Block的工作机制:
-
余弦相似度计算:
- 对卷积层的每个滤波器计算两两之间的余弦相似度
- 识别出学习到相似特征的冗余滤波器
-
动态修剪策略:
- 基于余弦相似度阈值θ=0.85进行修剪决策
- 10个epoch预热期,防止过早修剪破坏特征学习
- 每5个epoch懒惰更新,减少计算开销
-
计算效率提升:
- 在训练权重上达到15-20%的有效稀疏度
- 验证了滤波器收敛到冗余表示的假设
- 为高分辨率训练提供了计算可行性
MSFD的多尺度检测:
-
P2分支设计:
- 在步幅4上操作,特征图分辨率为320×320
- 使用深度可分离卷积减少计算成本
- 集成SE注意力机制提高特征表达能力
-
特征融合策略:
- P3特征上采样到P2分辨率
- 通过连接与P2特征融合
- 最终卷积层产生检测结果
-
轻量化实现:
- 总共仅增加114,592个参数(+1.1%)
- 通过可分离卷积减少FLOPs 8-9倍
- 为小目标检测提供了高效的多尺度方案
SAL-NWD损失的创新:
-
梯度稳定性:
- 标准化Wasserstein距离即使在不重叠情况下也提供非零梯度
- 解决了CIoU在小目标上的梯度消失问题
-
大小自适应:
- 对小目标应用更大的损失权重
- 通过对象面积的倒数进行加权
- 增强了对小目标的关注
-
混合损失:
- 结合NWD和CIoU的优势
- λ=0.5提供了最佳平衡
- 集成到YOLOv8的TaskAligned管道中
6. 算法预测结果与性能分析
6.1 整体性能对比
表:与最新技术的比较
| 模型 | 分辨率 | mAP@50 | mAP@50-95 | 召回率 | 参数量 | FPS |
|---|---|---|---|---|---|---|
| YOLOv5s | 640 | 0.231 | 0.125 | 0.363 | 7.2M | 99.0 |
| YOLOv8s | 640 | 0.387 | 0.233 | 0.374 | 9.83M | ~71 |
| YOLO-LE | 640 | 0.399 | 0.225 | 0.369 | 4.0M | 93.0 |
| DAU-YOLO | 640 | 0.561 | 0.328 | 0.473 | 28.9M | † |
| DroneScan-YOLO | 1280 | 0.553 | 0.356 | 0.518 | 10.23M | 96.7 |
†:未报告推理速度
性能分析:
1. 整体提升显著:
- 与YOLOv8s基准相比,mAP@50提升+16.6点(38.7%→55.3%)
- mAP@50-95提升+12.3点(23.3%→35.6%)
- 召回率从0.374提高到0.518(+38.5%)
2. 计算效率优异:
- 参数量仅增加+4.1%(9.83M→10.23M)
- 推理速度达到96.7 FPS,甚至比基准更高
- 在双倍分辨率下保持实时性能
3. 参数效率最佳:
- mAP@50/百万参数比例为0.054,高于DAU-YOLO(0.019)和其他架构
- 实现了性能和效率的最佳平衡
6.2 F1曲线分析
图表分析:
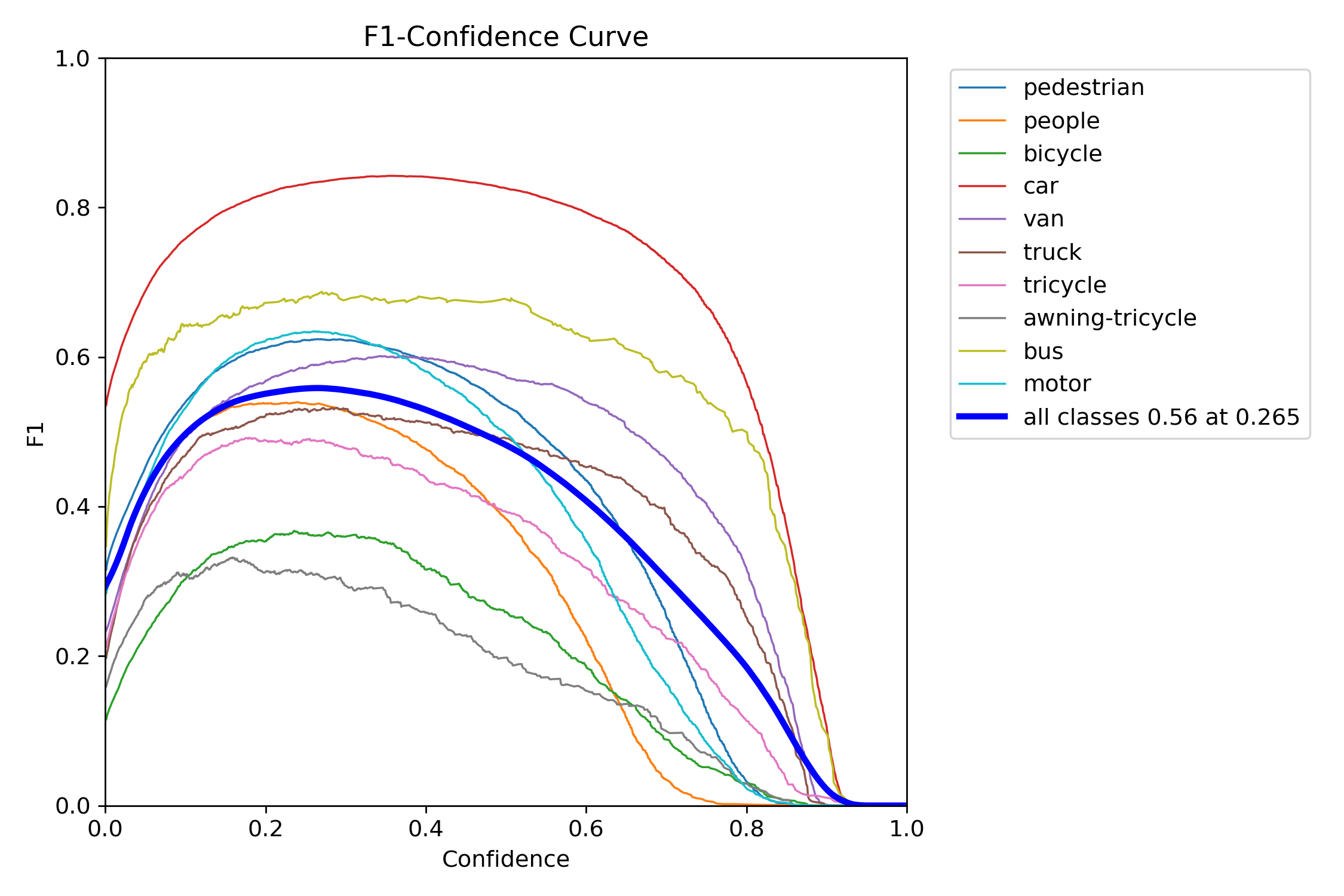
图3展示了DroneScan-YOLO的F1-置信度曲线,揭示了模型的性能特征:
1. 最优置信度阈值:
- 最佳置信度阈值为0.265
- 在此阈值下,宏观平均F1分数达到0.56
- 低于默认Ultralytics参数,说明了自定义优化的重要性
2. 类别间性能差异:
- 大目标类别(汽车):F1≈0.84,表现优异
- 小目标类别(自行车、遮阳三轮车):F1较低,但仍有提升
- 这种差距反映了小目标检测的固有难度
3. 实际应用启示:
- 较低的置信度阈值(0.265 vs 默认0.5)有利于召回率
- 在实际部署中需要根据具体应用场景调整阈值
- F1曲线为阈值选择提供了量化依据
6.3 混淆矩阵对比
图表分析:
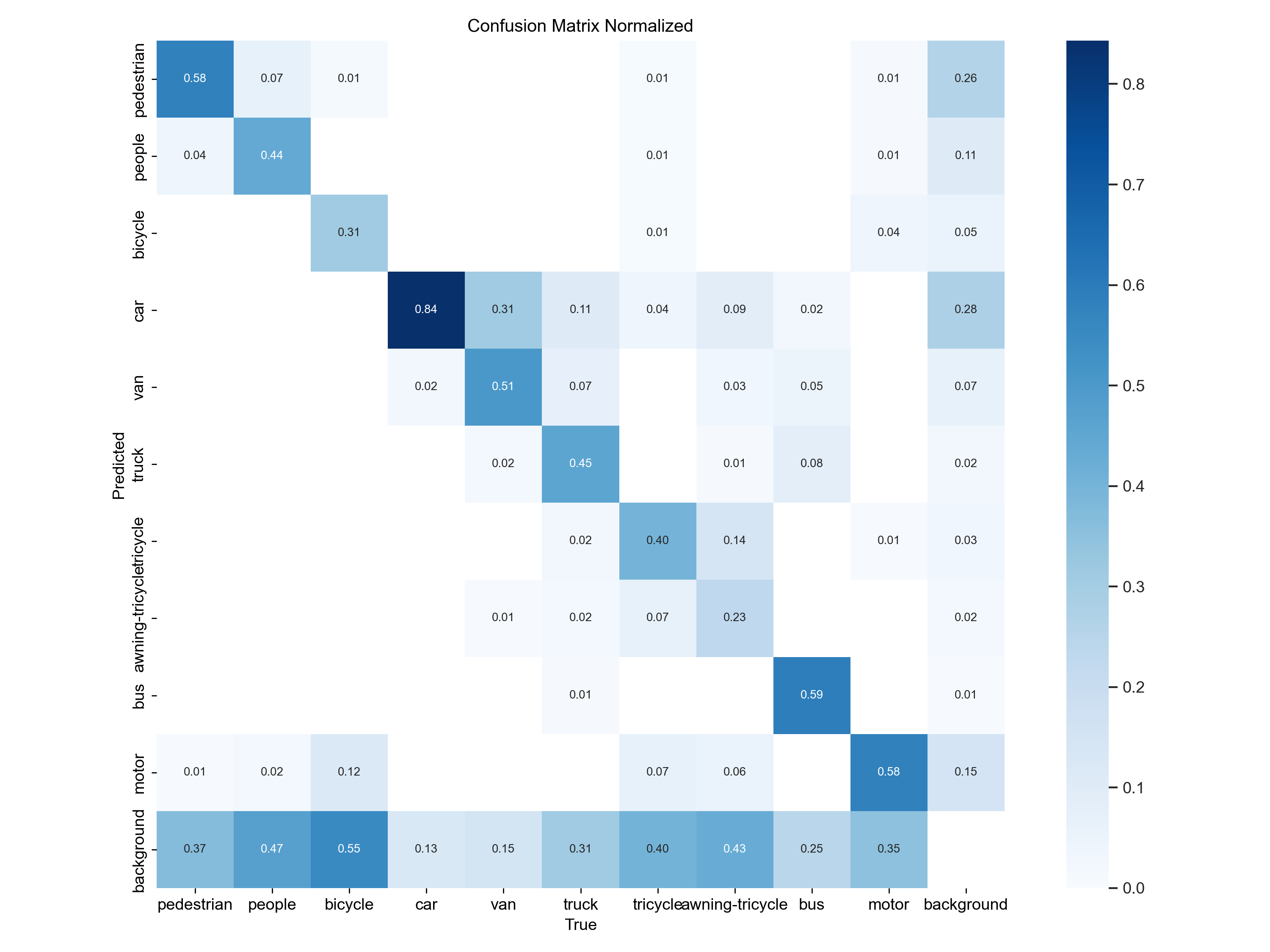
图4展示了标准化混淆矩阵的对比,直接说明了检测性能的改进:
1. 背景行的显著改善:
- DroneScan-YOLO的背景行明显更亮
- 表示未检测到的对象大幅减少
- 行人的未检测率从0.62降至0.37,降低40%
2. 对角线增强:
- DroneScan-YOLO的对角线元素更强
- 表示正确检测的比例提高
- 所有类别的召回率都有所提升
3. 小目标类别改进:
- 自行车、人群、遮阳三轮车等小目标类别的检测明显改善
- 验证了MSFD和SAL-NWD对小目标的优化效果
4. 错误分析:
- 主要错误集中在相似类别之间的混淆
- 例如汽车vs货车,人群vs行人
- 为进一步优化提供了方向
6.4 PR曲线分析
图表分析:
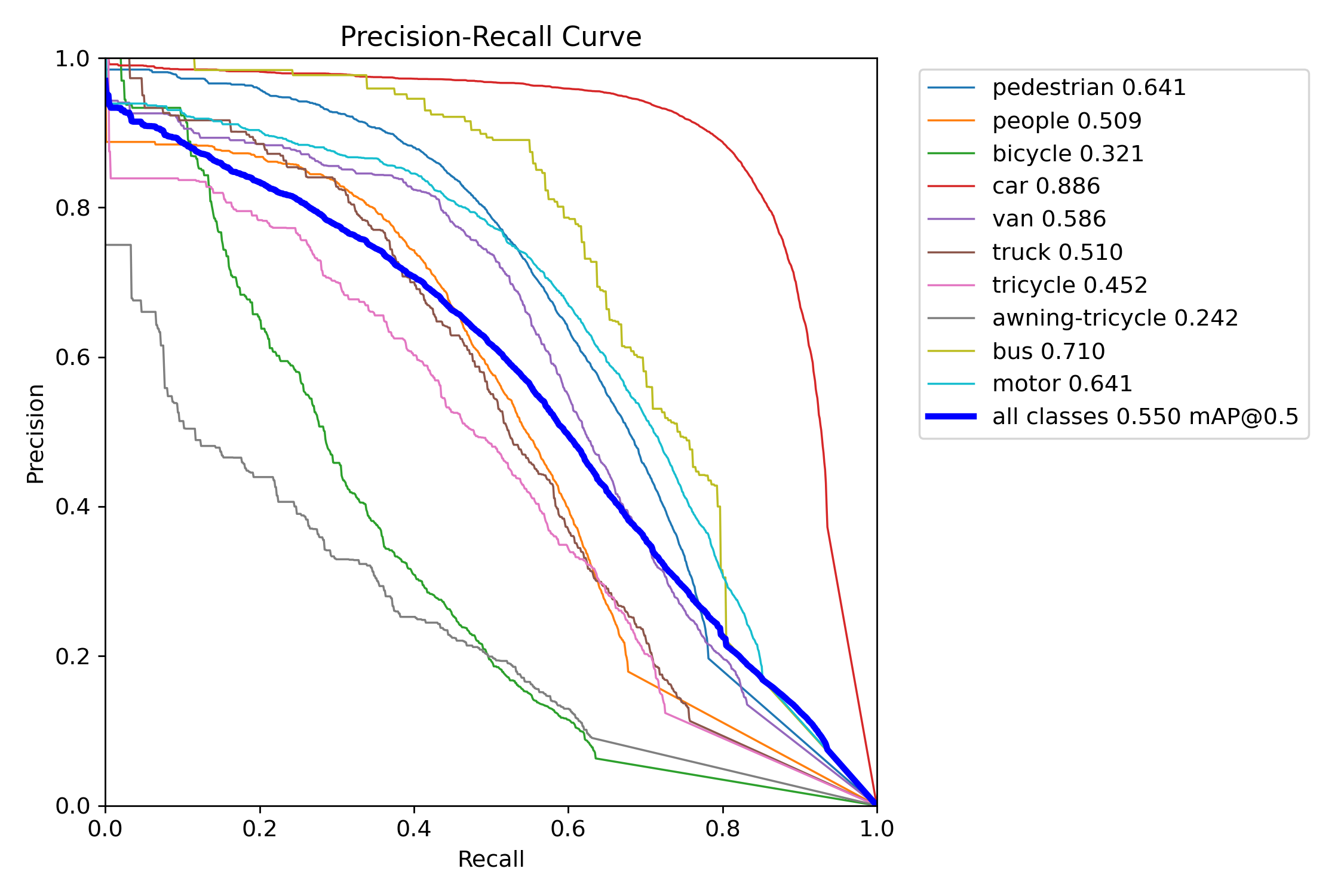
图5展示了精确度-召回率曲线的对比,DroneScan-YOLO在所有10个VisDrone类别上都优于基准:
1. 最显著的改进:
- 自行车:0.114→0.321(+0.207,+182%)
- 遮阳三轮车:0.156→0.242(+0.086,+55%)
- 摩托车:0.419→0.642(+0.223,+53%)
2. 全类别提升:
- 所有10个类别的AP@50都有提升
- 平均提升为+0.166点
- 最大提升为+0.223点(摩托车)
3. 曲线形状分析:
- DroneScan-YOLO的PR曲线更偏向右上角
- 表示在相同的召回率下具有更高的精确度
- 在相同的精确率下具有更高的召回率
4. 小目标优势明显:
- 小目标类别的改进最为显著
- 验证了高分辨率和多尺度检测的有效性
- 为小目标检测提供了成功范例
6.5 训练动态分析
图表分析:
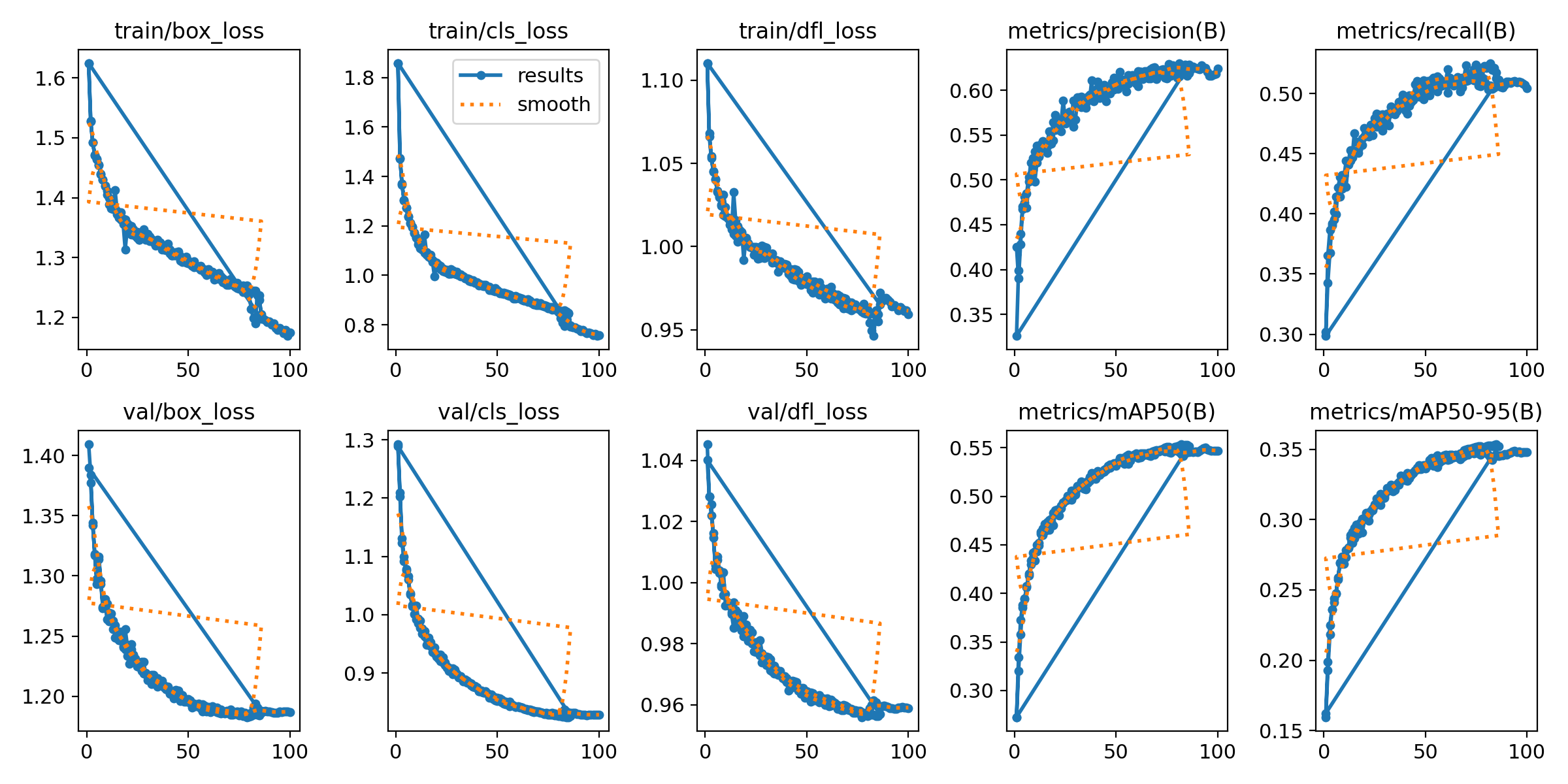
图6展示了DroneScan-YOLO在1280×1280像素下100个epoch的训练曲线:
1. 三个明显的阶段:
- 第1-10轮(RPA预热期): 模型快速收敛,第4轮达到0.385 mAP@50,接近640px基准的最终性能
- 第10-50轮(RPA激活期): RPA-Block激活引入损失曲线的轻微变化,稀疏掩码逐步稳定
- 第50-85轮(细化期): 模型细化检测至最终平台期0.553
2. 损失函数演化:
- 训练和验证损失(box、cls、DFL)单调递减
- 表明训练过程稳定,没有过拟合
- 验证损失的下降趋势与训练损失一致
3. 性能提升路径:
- 验证mAP@50从0.15上升到0.553
- 第85轮附近的小平台对应训练中断和从最后的检查点恢复
- 不影响最终收敛
4. 训练预算合理性:
- 100轮训练预算由DroneScan特定因素证明合理
- 1280px分辨率增加批次复杂度,自然减缓收敛
- 10轮RPA-Block预热延迟修剪机制的完全激活
6.6 定性结果展示
图表分析:
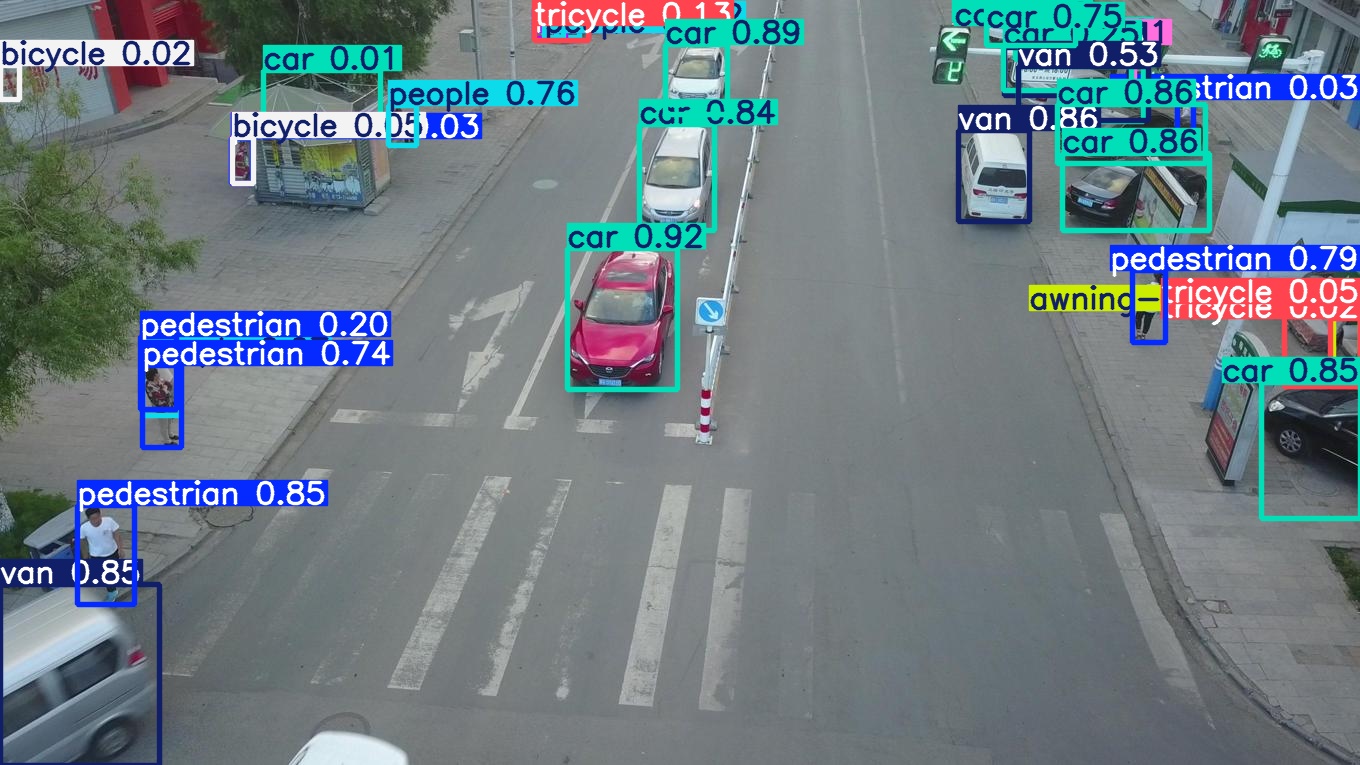
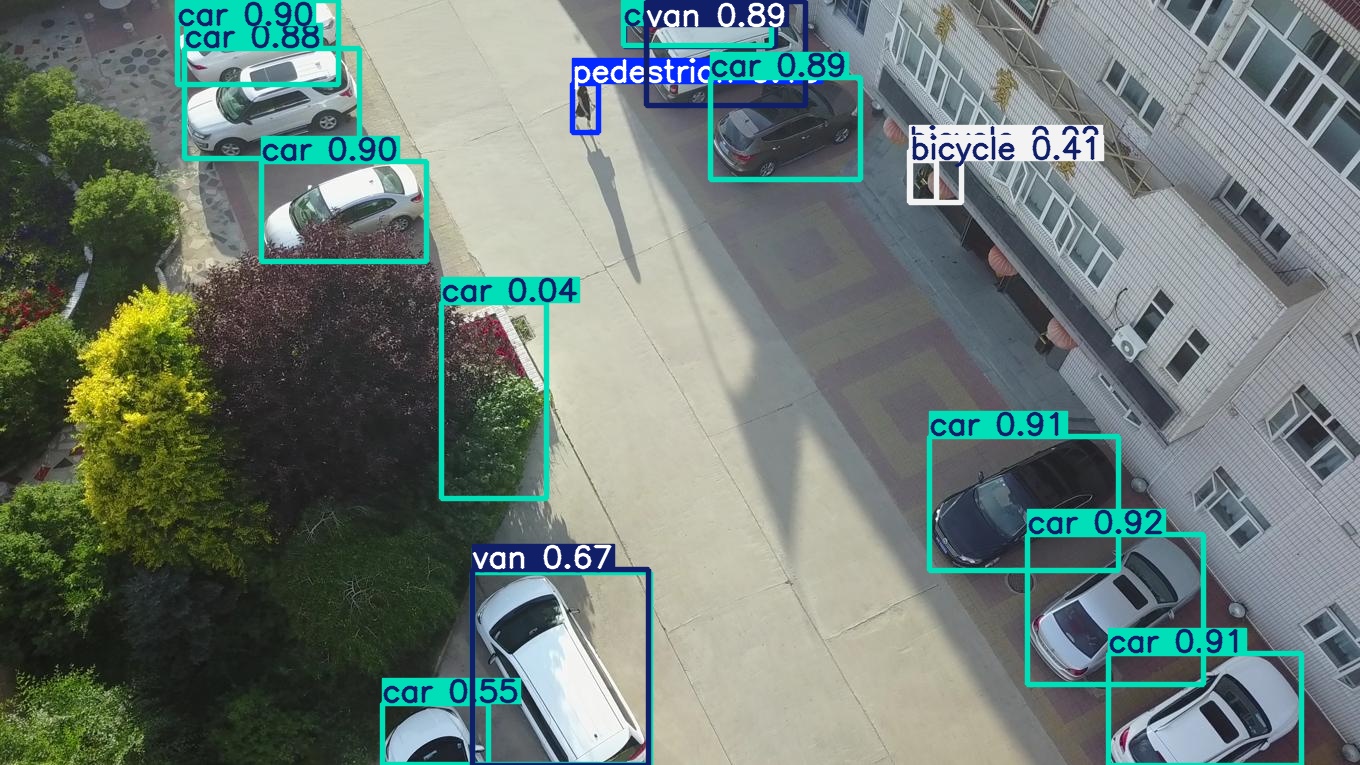
图1和图7展示了DroneScan-YOLO在不同真实世界场景中的检测表现:
图1特征:
- 高置信度车辆检测: 置信度0.88-0.92,准确识别各类车辆
- 成功的小目标检测: 自行车检测置信度0.41,在低密度场景中成功识别
- 多类别检测能力: 同时检测汽车、货车、自行车等不同类别
- 场景适应性: 在复杂的真实场景中表现稳定
图7特征:
- 住宅停车场场景: 高置信度检测(0.88-0.92)和成功的自行车识别(置信度0.41)
- 城市交叉口场景: 复杂城市场景中的多类别检测,包括VisDrone上最具挑战性的类别遮阳三轮车
- 密集场景处理: 能够处理高密度的小目标检测
- 多样化环境适应: 在不同场景下保持稳定性能
定性优势:
- 小目标检测能力强,即使在远距离也能识别
- 对复杂背景和遮挡有一定鲁棒性
- 置信度校准合理,高置信度检测准确率高
- 适合实际部署应用
7. 系统优势与局限性
7.1 系统优势
1. 小目标检测能力突出:
- 68%的子32px对象检测显著改善
- 自行车AP@50提升+187%,遮阳三轮车+52%
- 行人未检测率降低40%
2. 计算效率优异:
- 仅增加4.1%参数
- 推理速度96.7 FPS,高于基准
- mAP@50/百万参数比例最佳(0.054)
3. 系统性创新:
- 四个模块协同优化,不是简单堆叠
- 每个组件都针对特定问题设计
- 整体性能超过各部分之和
4. 实用性强:
- 代码完全开源
- 在真实数据集上验证
- 适合嵌入式UAV部署
7.2 系统局限性
1. 分辨率效应:
- 除分辨率效果外,架构模块的贡献估计为+3-5 mAP@50点
- 分辨率匹配的基准(YOLOv8s在1280px)未能在实验时间内完成
2. YOLO集成限制:
- MSFD通过前向钩子丰富P2表示,但未作为YOLOv8的YAML架构中的原生检测头集成
- 这将阻碍完整梯度的P2预测
3. 修剪效率:
- RPA-Block执行非结构化修剪,不物理移除参数
- 限制了在嵌入式硬件上的真实世界速度增益
4. 竞争对手对比:
- DAU-YOLO达到竞争性的mAP@50(0.561)
- 但包含28.9M参数,是DroneScan-YOLO的2.8倍
- 可能使嵌入式UAV部署不适合
8. 实际应用价值与展望
8.1 实际应用价值
1. UBV监控与安全:
- 实时小目标检测能力增强UAV监控效果
- 适用于交通监控、边境巡逻等应用
- 提高安全性和响应速度
2. 搜索与救援:
- 改进小目标检测对寻找失踪人员或小物体至关重要
- 高召回率确保不遗漏重要目标
- 实时性能支持快速决策
3. 农业与基础设施:
- 用于农作物监测和病虫害检测
- 基础设施巡检和损坏识别
- 提高自动化水平和工作效率
4. 技术推广价值:
- 四模块协同设计为其他目标检测任务提供参考
- 小目标检测技术可应用于其他领域
- 轻量化设计适合移动和边缘计算
8.2 未来研究方向
1. 原生YAML集成:
- 将MSFD作为第五检测头集成到YOLOv8的YAML架构中
- 启用完整梯度的P2预测
- 提高架构的兼容性和可扩展性
2. 结构化修剪:
- 在RPA-Block中实现结构化通道修剪
- 实现硬件级加速
- 在嵌入式硬件上获得真实世界速度增益
3. 数据集扩展:
- 在互补的UAV基准(UAVDT、VisDrone-MOT)上验证
- 测试方法的泛化能力
- 评估在不同场景下的性能
4. 骨干网络升级:
- 探索更强的骨干网络作为DroneScan v2的基础
- 结合最新的架构创新
- 进一步提升性能
9. 总结
DroneScan-YOLO提出了一种UAV目标检测架构,同时解决了标准检测器的四个基本限制。该系统在VisDrone2019-DET上实现了55.3% mAP@50和35.6% mAP@50-95,分别超过YOLOv8s基准+16.6和+12.3点,仅增加+4.1%额外参数和96.7 FPS推理速度。
小目标类别上的提升最为显著:自行车AP@50相对提高+187%,行人未检测率降低40%,确认MSFD和SAL-NWD有效解决了子32px对象的步幅8限制。DroneScan-YOLO尽管双倍分辨率但仍比基准更快,证明RPA-Block成功补偿了1280px训练的计算开销。
主要贡献总结:
- 系统化解决小目标检测的四个相互关联问题
- 创新的RPA-Block动态修剪机制
- 轻量化MSFD多尺度检测分支
- SAL-NWD混合损失解决小目标梯度消失
- 在保持实时性能的同时显著提升检测精度
技术价值:
- 为UAV目标检测提供了新的解决方案范式
- 在小目标检测领域取得了突破性进展
- 平衡了性能、速度和资源消耗
- 为相关研究提供了重要参考
DroneScan-YOLO的工作为UAV智能检测技术的发展做出了重要贡献,具有重要的理论意义和实际应用价值。
10. 参考信息
论文来源: arXiv:2604.13278
官方代码库: https://github.com/yannbellec/dronescan-yolo
数据集: VisDrone2019-DET
性能指标: mAP@50: 55.3%, mAP@50-95: 35.6%
推理速度: 96.7 FPS
参数量: 10.23M

立足具身智能前沿赛道,致力于搭建全球化、开源化、全栈式技术交流与实践共创平台。
更多推荐

 13
13 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)