机器人路径规划算法之PRM算法详解+MATLAB代码实现
PRM(概率路线图方法)是一种基于采样的运动规划算法,适用于高维空间路径规划问题。该算法分为两个阶段:学习阶段通过随机采样构建无碰撞的图结构(节点为自由点,边为无碰撞连接);查询阶段利用图搜索算法(如A*)在图中寻找起点到终点的路径。PRM具有概率完备性,适合多查询场景,但对狭窄通道采样效率低。文章详细介绍了算法步骤、参数设置、MATLAB实现及可视化方法,包括采样策略、碰撞检测和路径优化等关键环
目录
PRM(Probabilistic Roadmap Method,概率路线图方法)是一种经典的基于采样的运动规划算法,主要用于解决高维空间(如机械臂、多关节机器人)的路径规划问题。它的核心思想是“先建图,后查询”,通过随机采样在构型空间(C-Space)中构建一个无碰撞的图结构(Roadmap),然后利用图搜索算法(如A*、Dijkstra)在图上寻找起点到终点的路径。
一、 算法核心步骤
PRM算法通常分为两个阶段:学习阶段(Learning Phase) 和 查询阶段(Query Phase)。
阶段一:学习阶段(构建路线图)
这一阶段不关心具体的起点和终点,只负责构建一张覆盖自由空间(Free Space)的“地图”。
采样(Sampling):在机器人的构型空间中随机生成大量的样本点(Configurations)。例如,对于一个6自由度机械臂,每个样本点就是6个关节角度的组合。
碰撞检测(Collision Checking):对每个采样点进行碰撞检测,剔除那些与障碍物发生碰撞的点,只保留“自由点”。
邻域连接(Local Planning):对于每个自由点,在其一定半径范围内(或最近的K个点)寻找邻居。尝试用一条简单的局部路径(通常是直线)连接该点与邻居点。
边验证(Edge Validation):对尝试连接的局部路径进行密集的碰撞检测(或插值检测)。如果整条路径都无碰撞,则在图中添加一条边(Edge)。
最终,我们得到一个由节点(自由点)和边(无碰撞连接)组成的图 G=(V,E)。
阶段二:查询阶段(路径搜索)
当给定具体的起点 qstart和终点 qgoal时:
连接起终点:尝试将 qstart和 qgoal连接到已有的路线图 G上。即找到图中离它们最近的无碰撞节点,并验证连接路径是否可行。
图搜索:如果连接成功,起点和终点都成为了图的一部分。使用图搜索算法在 G中寻找从起点节点到终点节点的最短路径。
二、 关键参数与特性
采样策略:纯随机采样(Uniform Sampling)是基础,但可能导致在狭窄通道处采样困难。改进版使用高斯采样、桥测试采样或障碍物边界采样来提高在狭窄区域的采样密度。
邻域选择:通常使用 K-最近邻(K-NN) 或 固定半径(R-disc)。K太小图可能不连通,K太大会增加计算量。
概率完备性(Probabilistic Completeness):如果解存在,当采样点数 N→∞时,算法找到解的概率趋近于 1。但它不是完备的(Complete),因为有限的采样点可能永远错过某个关键通道。
多查询效率:PRM最大的优势在于,对于同一张地图(环境不变),只需要构建一次路线图,之后对于任意新的起终点组合,查询速度都非常快(仅需毫秒级)。
三、优缺点分析
|
优点 |
缺点 |
|---|---|
|
适用于高维空间,计算复杂度与维度呈多项式关系(优于栅格法) |
对于狭窄通道(Narrow Passage)问题,采样效率极低,难以生成连接 |
|
多查询场景下效率极高(一次建图,多次查询) |
路径质量可能不高(由于随机采样,路径可能不是最优的) |
|
实现相对简单 |
建图阶段耗时较长,且对于动态环境不适用 |
四、 应用场景
PRM及其变种(如PRM*,Lazy PRM)广泛应用于:
机械臂轨迹规划:在6-DoF或更高维的关节空间中进行规划。
虚拟原型验证:在CAD软件中验证装配序列或运动可行性。
动画角色运动生成:规划复杂环境中角色的运动。
五、MATLAB实现
%% PRM算法主程序
clear; clc; close all;
%% 1. 参数设置
params.N = 500; % 采样点数量
params.K = 10; % 每个点连接的最近邻数量
params.radius = 1.0; % 用于局部规划的半径(或使用KNN)
params.stepSize = 0.05; % 边验证时的插值步长
params.mapSize = [0, 10, 0, 10]; % 地图边界 [xmin, xmax, ymin, ymax]
%% 2. 创建环境(障碍物)
% 障碍物用凸多边形表示:[x1,y1; x2,y2; ...]
obstacles = cell(3, 1);
obstacles{1} = [2, 2; 2, 4; 4, 4; 4, 2]; % 矩形障碍物1
obstacles{2} = [6, 6; 6, 8; 8, 8; 8, 6]; % 矩形障碍物2
obstacles{3} = [1, 7; 3, 8; 5, 7; 3, 6]; % 不规则四边形障碍物
%% 3. 定义起点和终点
q_start = [0.5, 0.5];
q_goal = [9.5, 9.5];
%% 4. 构建PRM路线图
fprintf('开始构建PRM路线图...\n');
[V, E, G] = buildPRM(obstacles, params);
fprintf('路线图构建完成!\n');
fprintf('有效节点数: %d, 有效边数: %d\n', size(V, 1), size(E, 1));
%% 5. 查询路径
fprintf('\n开始查询路径...\n');
[path, success] = queryPRM(q_start, q_goal, V, E, obstacles, params);
%% 6. 可视化结果
if success
fprintf('找到路径!路径长度: %.2f\n', pathLength(path));
visualizePRM(q_start, q_goal, obstacles, V, E, path, params);
else
fprintf('未找到路径!\n');
visualizePRM(q_start, q_goal, obstacles, V, E, [], params);
end
%% 7. 辅助函数定义
function [V, E, G] = buildPRM(obstacles, params)
% 构建PRM路线图
V = []; % 节点集合
E = []; % 边集合
attempts = 0;
maxAttempts = params.N * 5; % 最大尝试次数,避免无限循环
while size(V, 1) < params.N && attempts < maxAttempts
attempts = attempts + 1;
% 1. 随机采样
q_rand = randomSample(params);
% 2. 碰撞检测
if isCollisionFree(q_rand, obstacles)
V = [V; q_rand];
% 3. 寻找邻居(K最近邻)
if size(V, 1) > 1
[neighbors, dists] = findNeighbors(q_rand, V, params.K);
% 4. 尝试连接邻居
for i = 1:length(neighbors)
q_near = V(neighbors(i), :);
% 检查是否已存在边(修复:处理E为空的情况)
edgeExists = false;
if ~isempty(E)
% 检查两个方向的边
if any(ismember(E, [size(V,1), neighbors(i)], 'rows')) || ...
any(ismember(E, [neighbors(i), size(V,1)], 'rows'))
edgeExists = true;
end
end
if ~edgeExists && dists(i) < params.radius * 3
% 局部规划(直线连接)
if localPlanner(q_rand, q_near, obstacles, params.stepSize)
E = [E; size(V,1), neighbors(i)];
end
end
end
end
end
end
% 构建邻接矩阵表示的图
n = size(V, 1);
G = zeros(n, n);
for i = 1:size(E, 1)
p1 = E(i, 1);
p2 = E(i, 2);
dist = norm(V(p1,:) - V(p2,:));
G(p1, p2) = dist;
G(p2, p1) = dist;
end
fprintf('总采样尝试次数: %d\n', attempts);
end
function q_rand = randomSample(params)
% 在构型空间中随机采样
x = params.mapSize(1) + rand() * (params.mapSize(2) - params.mapSize(1));
y = params.mapSize(3) + rand() * (params.mapSize(4) - params.mapSize(3));
q_rand = [x, y];
end
function collision = isCollisionFree(q, obstacles)
% 检查点是否与障碍物碰撞
collision = true;
for i = 1:length(obstacles)
obs = obstacles{i};
if inpolygon(q(1), q(2), obs(:,1), obs(:,2))
collision = false;
return;
end
end
end
function [neighbors, dists] = findNeighbors(q, V, K)
% 寻找K个最近邻
n = size(V, 1);
distances = zeros(n, 1);
for i = 1:n
distances(i) = norm(q - V(i,:));
end
[sortedDist, sortedIdx] = sort(distances);
% 排除自身(新点本身在V的最后)
K = min(K, n-1); % 确保K不超过节点数-1
if K <= 0
neighbors = [];
dists = [];
return;
end
% 如果新点是最后添加的,从排序中排除它
if sortedIdx(1) == n
startIdx = 2;
else
startIdx = 1;
end
endIdx = min(K + startIdx - 1, length(sortedIdx));
neighbors = sortedIdx(startIdx:endIdx);
dists = sortedDist(startIdx:endIdx);
end
function feasible = localPlanner(q1, q2, obstacles, stepSize)
% 检查两点之间的直线路径是否可行
feasible = true;
dist = norm(q2 - q1);
if dist == 0
return;
end
steps = max(1, ceil(dist / stepSize));
for s = 0:steps
t = s / steps;
q = q1 + t * (q2 - q1);
if ~isCollisionFree(q, obstacles)
feasible = false;
return;
end
end
end
function [path, success] = queryPRM(q_start, q_goal, V, E, obstacles, params)
% 查询路径
success = false;
path = [];
% 检查V和E是否为空
if isempty(V) || isempty(E)
fprintf('路线图为空,无法查询路径!\n');
return;
end
% 1. 连接起点和终点到路线图
[V, E, startIdx, goalIdx] = connectToRoadmap(q_start, q_goal, V, E, obstacles, params);
if isempty(startIdx) || isempty(goalIdx)
fprintf('起点或终点无法连接到路线图!\n');
return;
end
% 2. 构建图数据结构用于搜索
n = size(V, 1);
adjMatrix = zeros(n, n);
for i = 1:size(E, 1)
p1 = E(i, 1);
p2 = E(i, 2);
dist = norm(V(p1,:) - V(p2,:));
adjMatrix(p1, p2) = dist;
adjMatrix(p2, p1) = dist;
end
% 3. 使用A*算法搜索路径
[pathNodes, found] = astar(startIdx, goalIdx, V, adjMatrix);
if found
% 4. 转换为连续路径
path = V(pathNodes, :);
success = true;
end
end
function [V_new, E_new, startIdx, goalIdx] = connectToRoadmap(q_start, q_goal, V, E, obstacles, params)
% 连接起点和终点到现有路线图
V_new = V;
E_new = E;
% 检查起点是否在自由空间
if ~isCollisionFree(q_start, obstacles)
fprintf('起点在障碍物内!\n');
startIdx = [];
goalIdx = [];
return;
end
% 检查终点是否在自由空间
if ~isCollisionFree(q_goal, obstacles)
fprintf('终点在障碍物内!\n');
startIdx = [];
goalIdx = [];
return;
end
% 添加起点
V_new = [V_new; q_start];
startIdx = size(V_new, 1);
% 连接起点到最近的K个邻居
if ~isempty(V)
[neighbors, dists] = findNeighbors(q_start, V, min(params.K, size(V,1)));
for i = 1:length(neighbors)
if dists(i) < params.radius * 2
if localPlanner(q_start, V_new(neighbors(i),:), obstacles, params.stepSize)
E_new = [E_new; startIdx, neighbors(i)];
end
end
end
end
% 添加终点
V_new = [V_new; q_goal];
goalIdx = size(V_new, 1);
% 连接终点到最近的K个邻居
[neighbors, dists] = findNeighbors(q_goal, V_new(1:end-1,:), min(params.K, size(V_new,1)-1));
for i = 1:length(neighbors)
if neighbors(i) ~= startIdx && dists(i) < params.radius * 2
if localPlanner(q_goal, V_new(neighbors(i),:), obstacles, params.stepSize)
E_new = [E_new; goalIdx, neighbors(i)];
end
end
end
end
function [path, found] = astar(startIdx, goalIdx, V, adjMatrix)
% A*算法实现
n = size(V, 1);
gScore = inf(n, 1);
fScore = inf(n, 1);
cameFrom = zeros(n, 1);
gScore(startIdx) = 0;
fScore(startIdx) = heuristic(V(startIdx,:), V(goalIdx,:));
openSet = startIdx;
found = false;
while ~isempty(openSet)
[~, currentIdx] = min(fScore(openSet));
current = openSet(currentIdx);
if current == goalIdx
% 重构路径
path = reconstructPath(cameFrom, current);
found = true;
return;
end
openSet(currentIdx) = [];
% 获取所有邻居
neighbors = find(adjMatrix(current, :) > 0);
for i = 1:length(neighbors)
neighbor = neighbors(i);
tentative_gScore = gScore(current) + adjMatrix(current, neighbor);
if tentative_gScore < gScore(neighbor)
cameFrom(neighbor) = current;
gScore(neighbor) = tentative_gScore;
fScore(neighbor) = gScore(neighbor) + heuristic(V(neighbor,:), V(goalIdx,:));
if ~ismember(neighbor, openSet)
openSet = [openSet; neighbor];
end
end
end
end
path = [];
found = false;
end
function h = heuristic(q1, q2)
% 启发函数(欧氏距离)
h = norm(q1 - q2);
end
function path = reconstructPath(cameFrom, current)
% 重构路径
path = current;
while cameFrom(current) ~= 0
current = cameFrom(current);
path = [current; path];
end
end
function length = pathLength(path)
% 计算路径长度
length = 0;
for i = 1:size(path,1)-1
length = length + norm(path(i+1,:) - path(i,:));
end
end
function visualizePRM(q_start, q_goal, obstacles, V, E, path, params)
% 可视化PRM结果
figure('Position', [100, 100, 1200, 500]);
% 子图1: 路线图
subplot(1,2,1);
hold on; grid on; axis equal;
xlim([params.mapSize(1), params.mapSize(2)]);
ylim([params.mapSize(3), params.mapSize(4)]);
title('PRM路线图');
xlabel('X'); ylabel('Y');
% 绘制障碍物
for i = 1:length(obstacles)
obs = obstacles{i};
fill(obs(:,1), obs(:,2), [0.8, 0.2, 0.2], 'FaceAlpha', 0.7, 'EdgeColor', 'k', 'LineWidth', 1.5);
end
% 绘制边
if ~isempty(E)
for i = 1:size(E, 1)
p1 = V(E(i,1), :);
p2 = V(E(i,2), :);
plot([p1(1), p2(1)], [p1(2), p2(2)], 'b-', 'LineWidth', 0.5, 'Color', [0.7, 0.7, 1]);
end
end
% 绘制节点
if ~isempty(V)
scatter(V(:,1), V(:,2), 20, 'b', 'filled');
end
% 绘制起点和终点
scatter(q_start(1), q_start(2), 100, 'g', 'filled', 'MarkerEdgeColor', 'k', 'LineWidth', 2);
scatter(q_goal(1), q_goal(2), 100, 'r', 'filled', 'MarkerEdgeColor', 'k', 'LineWidth', 2);
text(q_start(1), q_start(2), '起点', 'VerticalAlignment', 'bottom', 'HorizontalAlignment', 'center', 'FontSize', 10, 'FontWeight', 'bold');
text(q_goal(1), q_goal(2), '终点', 'VerticalAlignment', 'bottom', 'HorizontalAlignment', 'center', 'FontSize', 10, 'FontWeight', 'bold');
% 子图2: 最终路径
subplot(1,2,2);
hold on; grid on; axis equal;
xlim([params.mapSize(1), params.mapSize(2)]);
ylim([params.mapSize(3), params.mapSize(4)]);
title('最终路径');
xlabel('X'); ylabel('Y');
% 绘制障碍物
for i = 1:length(obstacles)
obs = obstacles{i};
fill(obs(:,1), obs(:,2), [0.8, 0.2, 0.2], 'FaceAlpha', 0.7, 'EdgeColor', 'k', 'LineWidth', 1.5);
end
% 绘制路线图(可选)
if ~isempty(V)
scatter(V(:,1), V(:,2), 20, 'b', 'filled', 'MarkerFaceAlpha', 0.3);
end
% 绘制起点和终点
scatter(q_start(1), q_start(2), 100, 'g', 'filled', 'MarkerEdgeColor', 'k', 'LineWidth', 2);
scatter(q_goal(1), q_goal(2), 100, 'r', 'filled', 'MarkerEdgeColor', 'k', 'LineWidth', 2);
text(q_start(1), q_start(2), '起点', 'VerticalAlignment', 'bottom', 'HorizontalAlignment', 'center', 'FontSize', 10, 'FontWeight', 'bold');
text(q_goal(1), q_goal(2), '终点', 'VerticalAlignment', 'bottom', 'HorizontalAlignment', 'center', 'FontSize', 10, 'FontWeight', 'bold');
% 绘制路径
if ~isempty(path)
plot(path(:,1), path(:,2), 'r-', 'LineWidth', 3);
scatter(path(:,1), path(:,2), 40, 'r', 'filled');
legend('障碍物', '路线图节点', '起点', '终点', '路径', 'Location', 'best');
else
legend('障碍物', '路线图节点', '起点', '终点', 'Location', 'best');
end
hold off;
end5.1 整体架构
主程序 (Main Script)
├── 参数设置
├── 环境创建
├── 起点终点定义
├── 路线图构建
├── 路径查询
├── 可视化
└── 辅助函数集合5.2 详细模块说明
1. 主程序流程
%% 主程序 (Main Script)
1. 参数设置 (Parameters) % 定义算法参数
2. 创建环境 (Environment) % 定义障碍物多边形
3. 定义起点/终点 % 设置规划任务
4. 构建PRM路线图 (buildPRM) % 核心建图过程
5. 查询路径 (queryPRM) % 路径搜索过程
6. 可视化结果 (visualizePRM) % 结果展示2. 核心功能函数
路线图构建模块
function [V, E, G] = buildPRM(obstacles, params)
├── 输入: obstacles(障碍物), params(参数)
├── 输出: V(节点坐标), E(边列表), G(邻接矩阵)
└── 流程:
1. 初始化节点集V和边集E
2. While 节点数 < N
├── 随机采样 randomSample()
├── 碰撞检测 isCollisionFree()
└── If 无碰撞
├── 添加节点到V
├── 寻找最近邻 findNeighbors()
└── For 每个邻居
├── 检查边是否已存在
└── 局部规划 localPlanner()路径查询模块
function [path, success] = queryPRM(q_start, q_goal, V, E, obstacles, params)
├── 输入: 起终点, 路线图, 障碍物, 参数
├── 输出: path(路径), success(是否成功)
└── 流程:
1. 连接起终点 connectToRoadmap()
2. 构建邻接矩阵
3. A*搜索 astar()
4. 返回路径3. 辅助工具函数
几何与碰撞检测
randomSample() % 在构型空间内均匀随机采样
isCollisionFree() % 点与障碍物的碰撞检测(基于inpolygon)
localPlanner() % 直线路径碰撞检测(插值法)图结构操作
findNeighbors() % K最近邻搜索(欧氏距离)
connectToRoadmap() % 将起终点连接到现有路线图
astar() % A*图搜索算法
heuristic() % 启发函数(欧氏距离)
reconstructPath() % 从cameFrom重建路径工具函数
pathLength() % 计算路径长度(欧氏距离和)
visualizePRM() % 双子图可视化4. 数据结构设计
节点集 V
V = [x1, y1; % 节点1坐标
x2, y2; % 节点2坐标
...] % N×2矩阵边集 E
E = [node1, node2; % 边1连接节点1和2
node3, node4; % 边2连接节点3和4
...] % M×2矩阵邻接矩阵 G
G(i,j) = distance % 节点i到j的距离
G(j,i) = distance % 对称矩阵
G(i,j)=0 % 无边连接障碍物 obstacles
obstacles = {poly1, poly2, ...} % 单元格数组
poly1 = [x1,y1; x2,y2; ...] % 多边形顶点5. 关键参数说明
|
参数 |
变量名 |
作用 |
推荐值 |
|---|---|---|---|
|
采样点数 |
N |
控制路线图密度 |
300-1000 |
|
最近邻数 |
K |
每个点连接的邻居数 |
8-15 |
|
连接半径 |
radius |
限制连接距离 |
0.5-2.0 |
|
插值步长 |
stepSize |
碰撞检测精度 |
0.05-0.2 |
6. 算法流程图
开始
↓
初始化参数和环境
↓
构建PRM路线图
├── 随机采样N个点
├── 保留无碰撞点
├── 连接K个最近邻
└── 验证边无碰撞
↓
连接起点和终点
↓
A*图搜索
↓
输出路径
↓
可视化结果5.3 结果
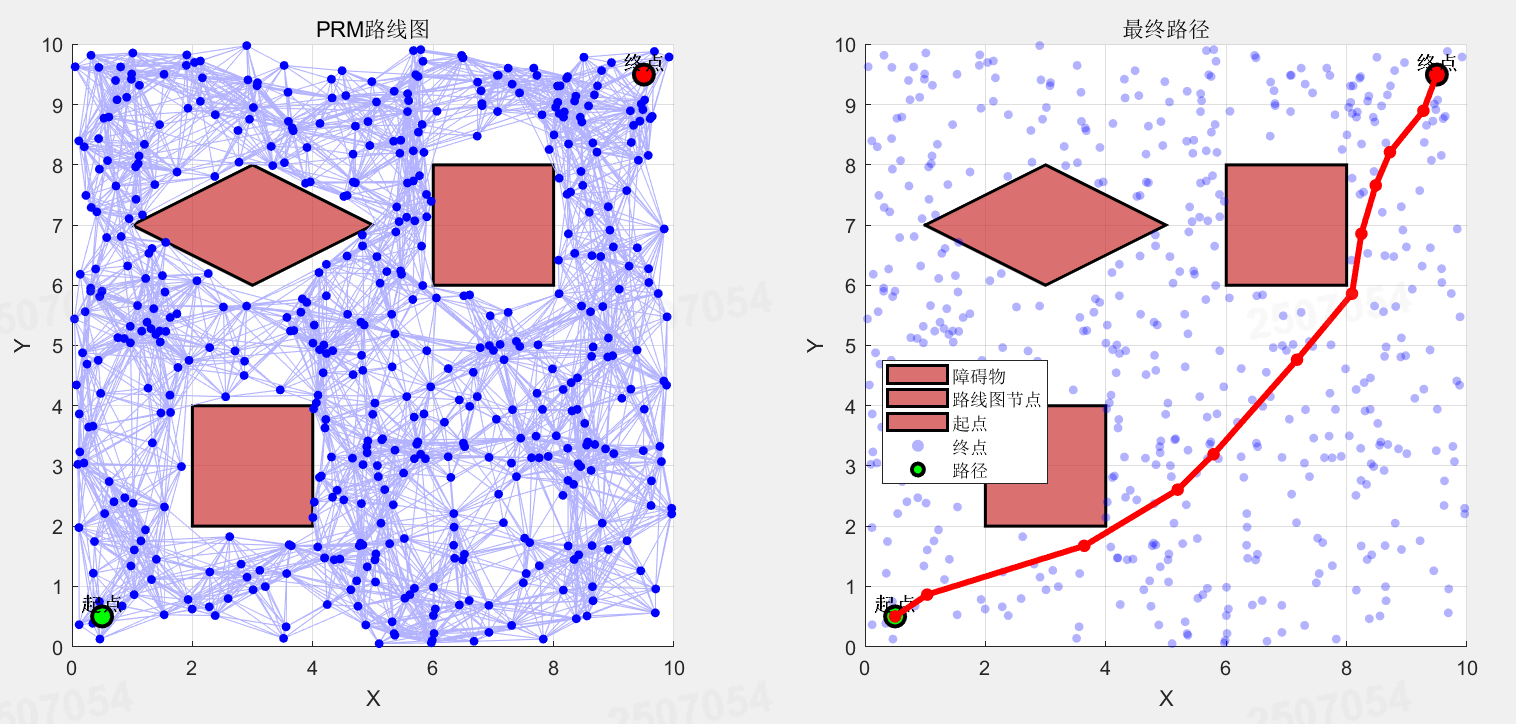
命令行窗口:
开始构建PRM路线图...
总采样尝试次数: 562
路线图构建完成!
有效节点数: 500, 有效边数: 4617
开始查询路径...
找到路径!路径长度: 13.52可视化:
会显示两个子图:
左图: 完整的PRM路线图,包含所有采样点和连接边
右图: 最终找到的路径(如果存在)

立足具身智能前沿赛道,致力于搭建全球化、开源化、全栈式技术交流与实践共创平台。
更多推荐

 18
18 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)