ROS2学习Gazebo+RVIZ2仿真实例
本文介绍了ROS2机器人仿真项目FishBot的创建和配置过程。主要内容包括:1)创建功能包和URDF文件,定义机器人模型结构;2)编写Launch文件启动Gazebo仿真环境;3)配置键盘控制插件teleop_twist_keyboard;4)编译运行项目并设置RViz2可视化界面;5)使用rqt工具查看速度数据。文章详细说明了URDF文件中各部件(底盘、激光雷达、轮子等)的定义方式,以及Gaz
一、项目创建
1.1 创建功能包
(1)创建功能包
打开终端:
mkdir -p robot/robot_ws/src
cd robot/robot_ws/srcros2 pkg create fishbot_description --build-type ament_python(2)创建urdf文件
创建urdf文件夹:
cd fishbot_description && mkdir urdf 创建urdf文件:
touch urdf/fishbot_gazebo.urdfnano urdf/fishbot_gazebo.urdf<?xml version="1.0"?>
<robot name="fishbot">
<!-- Robot Footprint -->
<link name="base_footprint"/>
<joint name="base_joint" type="fixed">
<parent link="base_footprint"/>
<child link="base_link"/>
<origin xyz="0.0 0.0 0.076" rpy="0 0 0"/>
</joint>
<!-- base link -->
<link name="base_link">
<visual>
<origin xyz="0 0 0.0" rpy="0 0 0"/>
<geometry>
<cylinder length="0.12" radius="0.10"/>
</geometry>
<material name="blue">
<color rgba="0.1 0.1 1.0 0.5" />
</material>
</visual>
<collision>
<origin xyz="0 0 0.0" rpy="0 0 0"/>
<geometry>
<cylinder length="0.12" radius="0.10"/>
</geometry>
<material name="blue">
<color rgba="0.1 0.1 1.0 0.5" />
</material>
</collision>
<inertial>
<mass value="0.2"/>
<inertia ixx="0.0122666" ixy="0" ixz="0" iyy="0.0122666" iyz="0" izz="0.02"/>
</inertial>
</link>
<!-- laser link -->
<link name="laser_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<cylinder length="0.02" radius="0.02"/>
</geometry>
<material name="black">
<color rgba="0.0 0.0 0.0 0.5" />
</material>
</visual>
<collision>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<cylinder length="0.02" radius="0.02"/>
</geometry>
<material name="black">
<color rgba="0.0 0.0 0.0 0.5" />
</material>
</collision>
<inertial>
<mass value="0.1"/>
<inertia ixx="0.000190416666667" ixy="0" ixz="0" iyy="0.0001904" iyz="0" izz="0.00036"/>
</inertial>
</link>
<!-- laser joint -->
<joint name="laser_joint" type="fixed">
<parent link="base_link" />
<child link="laser_link" />
<origin xyz="0 0 0.075" />
</joint>
<link name="imu_link">
<visual>
<origin xyz="0 0 0.0" rpy="0 0 0"/>
<geometry>
<box size="0.02 0.02 0.02"/>
</geometry>
</visual>
<collision>
<origin xyz="0 0 0.0" rpy="0 0 0"/>
<geometry>
<box size="0.02 0.02 0.02"/>
</geometry>
</collision>
<inertial>
<mass value="0.1"/>
<inertia ixx="0.000190416666667" ixy="0" ixz="0" iyy="0.0001904" iyz="0" izz="0.00036"/>
</inertial>
</link>
<!-- imu joint -->
<joint name="imu_joint" type="fixed">
<parent link="base_link" />
<child link="imu_link" />
<origin xyz="0 0 0.02" />
</joint>
<link name="left_wheel_link">
<visual>
<origin xyz="0 0 0" rpy="1.57079 0 0"/>
<geometry>
<cylinder length="0.04" radius="0.032"/>
</geometry>
<material name="black">
<color rgba="0.0 0.0 0.0 0.5" />
</material>
</visual>
<collision>
<origin xyz="0 0 0" rpy="1.57079 0 0"/>
<geometry>
<cylinder length="0.04" radius="0.032"/>
</geometry>
<material name="black">
<color rgba="0.0 0.0 0.0 0.5" />
</material>
</collision>
<inertial>
<mass value="0.2"/>
<inertia ixx="0.000190416666667" ixy="0" ixz="0" iyy="0.0001904" iyz="0" izz="0.00036"/>
</inertial>
</link>
<link name="right_wheel_link">
<visual>
<origin xyz="0 0 0" rpy="1.57079 0 0"/>
<geometry>
<cylinder length="0.04" radius="0.032"/>
</geometry>
<material name="black">
<color rgba="0.0 0.0 0.0 0.5" />
</material>
</visual>
<collision>
<origin xyz="0 0 0" rpy="1.57079 0 0"/>
<geometry>
<cylinder length="0.04" radius="0.032"/>
</geometry>
<material name="black">
<color rgba="0.0 0.0 0.0 0.5" />
</material>
</collision>
<inertial>
<mass value="0.2"/>
<inertia ixx="0.000190416666667" ixy="0" ixz="0" iyy="0.0001904" iyz="0" izz="0.00036"/>
</inertial>
</link>
<joint name="left_wheel_joint" type="continuous">
<parent link="base_link" />
<child link="left_wheel_link" />
<origin xyz="-0.02 0.10 -0.06" />
<axis xyz="0 1 0" />
</joint>
<joint name="right_wheel_joint" type="continuous">
<parent link="base_link" />
<child link="right_wheel_link" />
<origin xyz="-0.02 -0.10 -0.06" />
<axis xyz="0 1 0" />
</joint>
<link name="caster_link">
<visual>
<origin xyz="0 0 0" rpy="1.57079 0 0"/>
<geometry>
<sphere radius="0.016"/>
</geometry>
<material name="black">
<color rgba="0.0 0.0 0.0 0.5" />
</material>
</visual>
<collision>
<origin xyz="0 0 0" rpy="1.57079 0 0"/>
<geometry>
<sphere radius="0.016"/>
</geometry>
<material name="black">
<color rgba="0.0 0.0 0.0 0.5" />
</material>
</collision>
<inertial>
<mass value="0.02"/>
<inertia ixx="0.000190416666667" ixy="0" ixz="0" iyy="0.0001904" iyz="0" izz="0.00036"/>
</inertial>
</link>
<joint name="caster_joint" type="fixed">
<parent link="base_link" />
<child link="caster_link" />
<origin xyz="0.06 0.0 -0.076" />
<axis xyz="0 1 0" />
</joint>
<gazebo reference="caster_link">
<material>Gazebo/Black</material>
</gazebo>
<gazebo reference="caster_link">
<mu1 value="0.0"/>
<mu2 value="0.0"/>
<kp value="1000000.0" />
<kd value="10.0" />
<!-- <fdir1 value="0 0 1"/> -->
</gazebo>
<gazebo>
<plugin name='diff_drive' filename='libgazebo_ros_diff_drive.so'>
<ros>
<namespace>/</namespace>
<remapping>cmd_vel:=cmd_vel</remapping>
<remapping>odom:=odom</remapping>
</ros>
<update_rate>30</update_rate>
<!-- wheels -->
<!-- <left_joint>left_wheel_joint</left_joint> -->
<!-- <right_joint>right_wheel_joint</right_joint> -->
<left_joint>left_wheel_joint</left_joint>
<right_joint>right_wheel_joint</right_joint>
<!-- kinematics -->
<wheel_separation>0.2</wheel_separation>
<wheel_diameter>0.065</wheel_diameter>
<!-- limits -->
<max_wheel_torque>20</max_wheel_torque>
<max_wheel_acceleration>1.0</max_wheel_acceleration>
<!-- output -->
<publish_odom>true</publish_odom>
<publish_odom_tf>true</publish_odom_tf>
<publish_wheel_tf>false</publish_wheel_tf>
<odometry_frame>odom</odometry_frame>
<robot_base_frame>base_footprint</robot_base_frame>
</plugin>
<plugin name="fishbot_joint_state" filename="libgazebo_ros_joint_state_publisher.so">
<ros>
<remapping>~/out:=joint_states</remapping>
</ros>
<update_rate>30</update_rate>
<joint_name>right_wheel_joint</joint_name>
<joint_name>left_wheel_joint</joint_name>
</plugin>
</gazebo>
<gazebo reference="laser_link">
<material>Gazebo/Black</material>
</gazebo>
<gazebo reference="imu_link">
<sensor name="imu_sensor" type="imu">
<plugin filename="libgazebo_ros_imu_sensor.so" name="imu_plugin">
<ros>
<namespace>/</namespace>
<remapping>~/out:=imu</remapping>
</ros>
<initial_orientation_as_reference>false</initial_orientation_as_reference>
</plugin>
<always_on>true</always_on>
<update_rate>100</update_rate>
<visualize>true</visualize>
<imu>
<angular_velocity>
<x>
<noise type="gaussian">
<mean>0.0</mean>
<stddev>2e-4</stddev>
<bias_mean>0.0000075</bias_mean>
<bias_stddev>0.0000008</bias_stddev>
</noise>
</x>
<y>
<noise type="gaussian">
<mean>0.0</mean>
<stddev>2e-4</stddev>
<bias_mean>0.0000075</bias_mean>
<bias_stddev>0.0000008</bias_stddev>
</noise>
</y>
<z>
<noise type="gaussian">
<mean>0.0</mean>
<stddev>2e-4</stddev>
<bias_mean>0.0000075</bias_mean>
<bias_stddev>0.0000008</bias_stddev>
</noise>
</z>
</angular_velocity>
<linear_acceleration>
<x>
<noise type="gaussian">
<mean>0.0</mean>
<stddev>1.7e-2</stddev>
<bias_mean>0.1</bias_mean>
<bias_stddev>0.001</bias_stddev>
</noise>
</x>
<y>
<noise type="gaussian">
<mean>0.0</mean>
<stddev>1.7e-2</stddev>
<bias_mean>0.1</bias_mean>
<bias_stddev>0.001</bias_stddev>
</noise>
</y>
<z>
<noise type="gaussian">
<mean>0.0</mean>
<stddev>1.7e-2</stddev>
<bias_mean>0.1</bias_mean>
<bias_stddev>0.001</bias_stddev>
</noise>
</z>
</linear_acceleration>
</imu>
</sensor>
</gazebo>
<gazebo reference="laser_link">
<sensor name="laser_sensor" type="ray">
<always_on>true</always_on>
<visualize>true</visualize>
<update_rate>5</update_rate>
<pose>0 0 0.075 0 0 0</pose>
<ray>
<scan>
<horizontal>
<samples>360</samples>
<resolution>1.000000</resolution>
<min_angle>0.000000</min_angle>
<max_angle>6.280000</max_angle>
</horizontal>
</scan>
<range>
<min>0.120000</min>
<max>3.5</max>
<resolution>0.015000</resolution>
</range>
<noise>
<type>gaussian</type>
<mean>0.0</mean>
<stddev>0.01</stddev>
</noise>
</ray>
<plugin name="laserscan" filename="libgazebo_ros_ray_sensor.so">
<ros>
<!-- <namespace>/tb3</namespace> -->
<remapping>~/out:=scan</remapping>
</ros>
<output_type>sensor_msgs/LaserScan</output_type>
<frame_name>laser_link</frame_name>
</plugin>
</sensor>
</gazebo>
</robot>(3)创建launch文件
创建launch文件夹:
mkdir launch创建launch文件:
touch launch/gazebo.launch.pynano launch/gazebo.launch.pyimport os
from launch import LaunchDescription
from launch.actions import ExecuteProcess
from launch_ros.actions import Node
from launch_ros.substitutions import FindPackageShare
def generate_launch_description():
robot_name_in_model = 'fishbot'
package_name = 'fishbot_description'
urdf_name = "fishbot_gazebo.urdf"
ld = LaunchDescription()
pkg_share = FindPackageShare(package=package_name).find(package_name)
urdf_model_path = os.path.join(pkg_share, f'urdf/{urdf_name}')
# Start Gazebo server
start_gazebo_cmd = ExecuteProcess(
# cmd=['gazebo', '--verbose','-s', 'libgazebo_ros_init.so', '-s', 'libgazebo_ros_factory.so', gazebo_world_path],
cmd=['gazebo', '--verbose','-s', 'libgazebo_ros_init.so', '-s', 'libgazebo_ros_factory.so'],
output='screen')
# Launch the robot
spawn_entity_cmd = Node(
package='gazebo_ros',
executable='spawn_entity.py',
arguments=['-entity', robot_name_in_model, '-file', urdf_model_path ], output='screen')
# Start Robot State publisher
start_robot_state_publisher_cmd = Node(
package='robot_state_publisher',
executable='robot_state_publisher',
arguments=[urdf_model_path]
)
# Launch RViz
start_rviz_cmd = Node(
package='rviz2',
executable='rviz2',
name='rviz2',
output='screen',
# arguments=['-d', default_rviz_config_path]
)
ld.add_action(start_gazebo_cmd)
ld.add_action(spawn_entity_cmd)
ld.add_action(start_robot_state_publisher_cmd)
ld.add_action(start_rviz_cmd)
return ld
1.2 修改setup.py文件
nano setup.pyfrom setuptools import setup
from glob import glob
import os
package_name = 'fishbot_description'
setup(
name=package_name,
version='0.0.0',
packages=[package_name],
data_files=[
('share/ament_index/resource_index/packages',
['resource/' + package_name]),
('share/' + package_name, ['package.xml']),
(os.path.join('share', package_name, 'launch'), glob('launch/*.launch.py')),
(os.path.join('share', package_name, 'urdf'), glob('urdf/**')),
],
install_requires=['setuptools'],
zip_safe=True,
maintainer='root',
maintainer_email='root@todo.todo',
description='TODO: Package description',
license='TODO: License declaration',
tests_require=['pytest'],
entry_points={
'console_scripts': [
],
},
)1.3 使用键盘控制fishbot
(1)安装键盘控制插件
需要一个键盘控制工具,可以用下面的指令安装:
sudo apt install ros-humble-teleop-twist-keyboard
这个功能包下有一个节点,这个节点会监听键盘的按键事件,然后发布cmd_vel话题,该话题被gazebo的两轮差速插件所订阅。所以可以通过这个节点来控制fishbot。
如果你想让这个节点不是发布cmd_vel话题,而是别的,可以采用ROS2的话题重映射功能。
eg:ros2 run teleop_twist_keyboard teleop_twist_keyboard --ros-args --remap cmd_vel:=cmd_vel1ros2 run teleop_twist_keyboard teleop_twist_keyboard --ros-args --remap cmd_vel:=cmd_vel1
(2)使用键盘控制插件
ros2 run teleop_twist_keyboard teleop_twist_keyboard
二、编译和运行
2.1 编译和运行
(1)编译
colcon build(2)运行
source instal/setup.bashros2 launch fishbot_description gazebo.launch.py
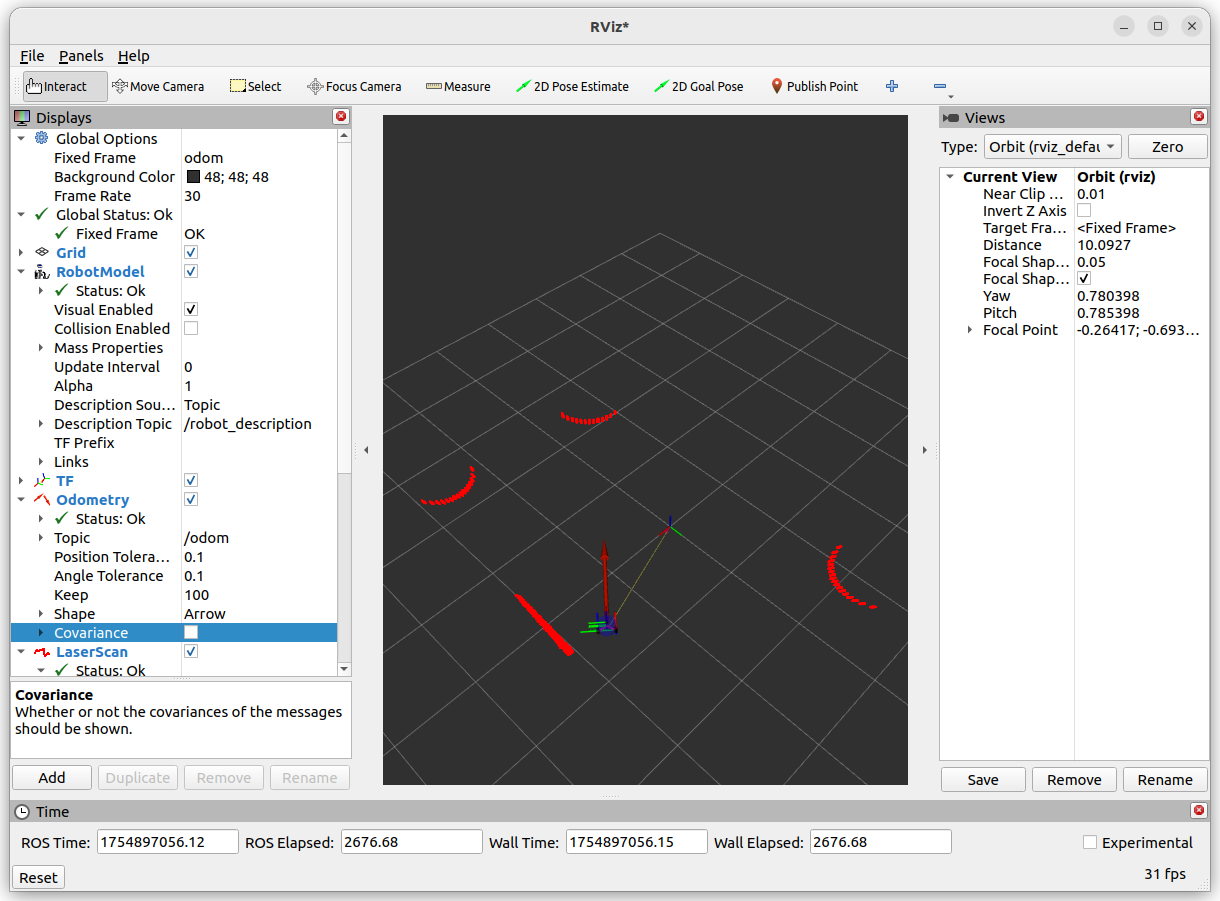
2.2 设置rviz2
(1)设置Global Options
Fixed Frame项选择 odom:
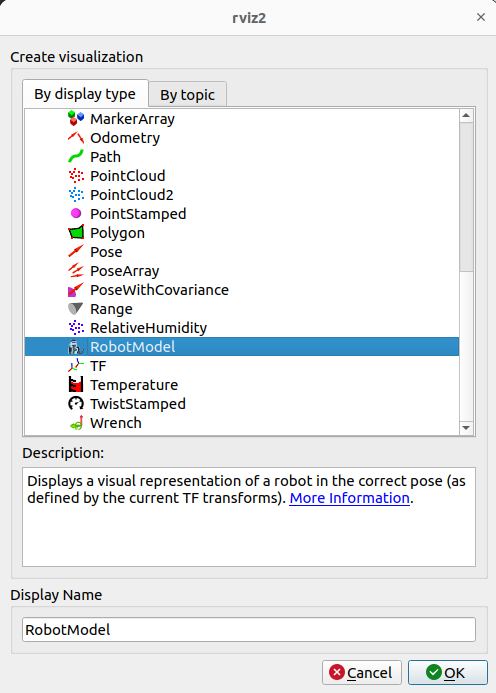
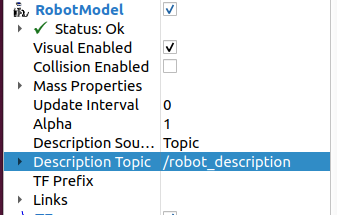
(2)设置RobotModel
点击Add,选择RobotModel:
Description Topic项选择 /robot_description:
(3)设置Odometry
点击Add,选择Odometry:
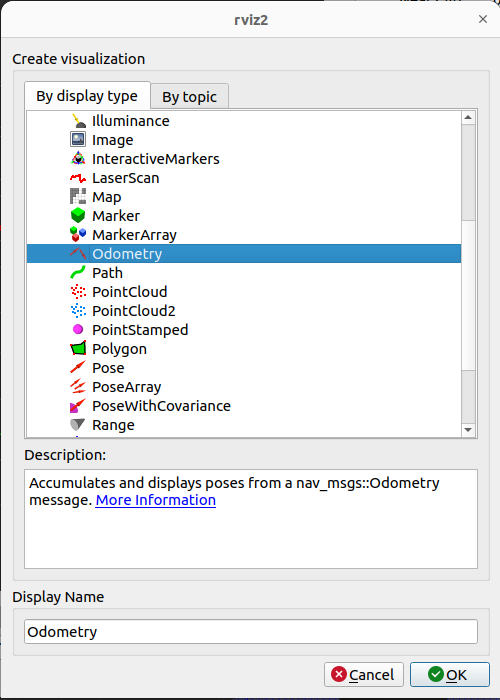
topic选择 /odom:
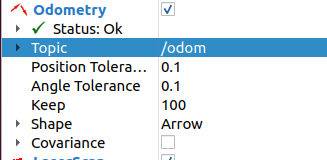
取消勾选Covariance:
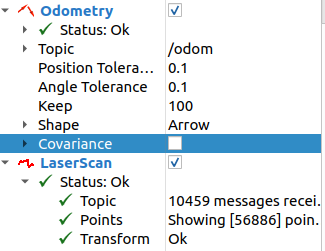
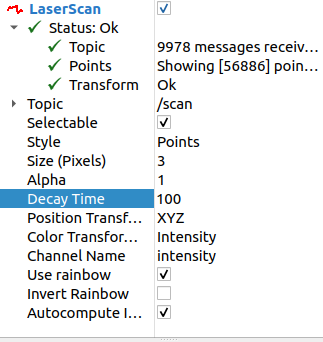
(4)设置LaserScan
点击Add,选择LaserScan:
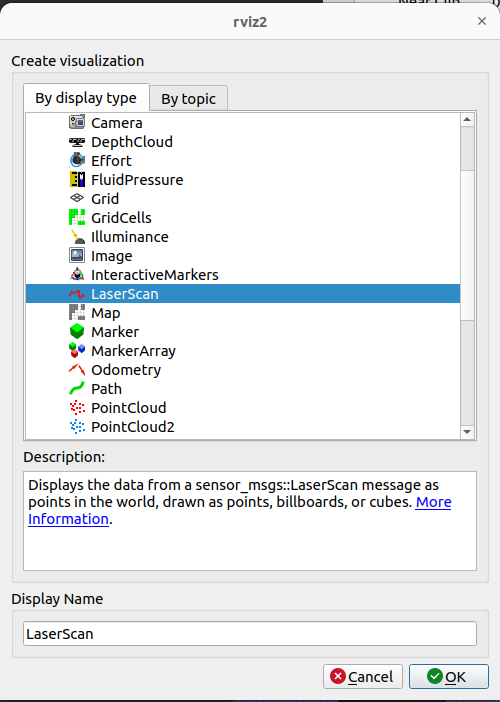
topic选择 /scan:
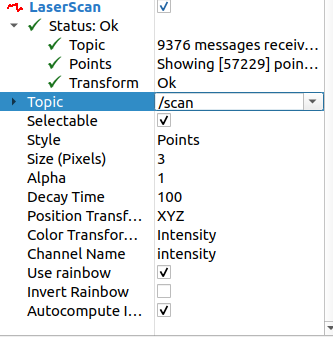
topiDecay Time设置为100(扫描延迟时间):
(5)结果显示
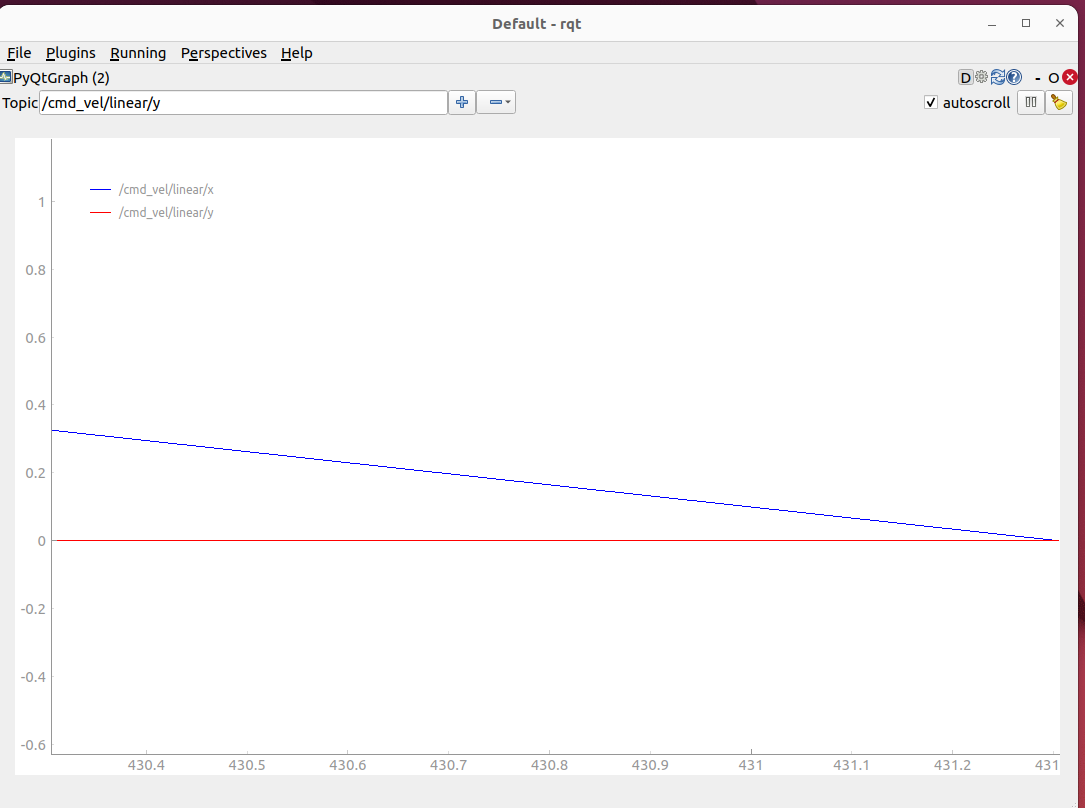
2.3 用rqt查看速度数据
启动rqt:
rqt选择Plugin->Visualization->Plot:
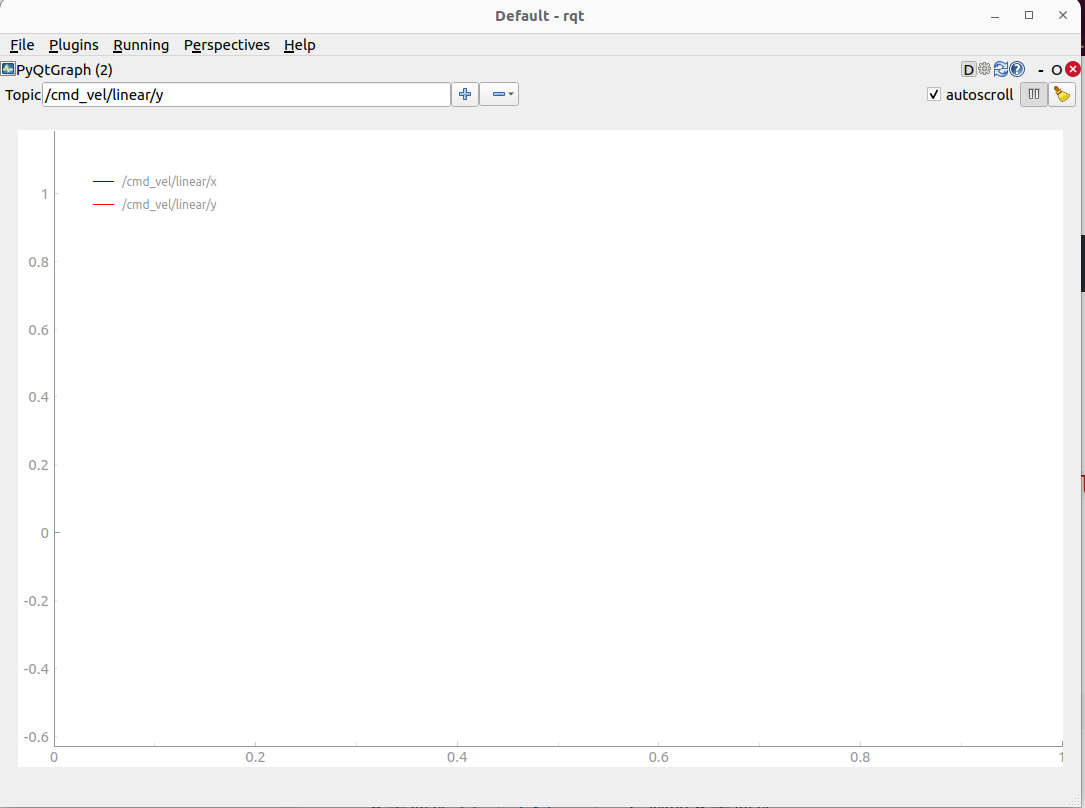
在上方Topic输入/cmd_vel/linear/x,再输入/cmd_vel/angular/z,然后用键盘控制机器人移动。

立足具身智能前沿赛道,致力于搭建全球化、开源化、全栈式技术交流与实践共创平台。
更多推荐

 15
15 0
0- 0



 已为社区贡献11条内容
已为社区贡献11条内容

所有评论(0)