gazebo中相机标定和手眼标定——ROS2焊接机械臂(五)
本文介绍了相机标定和手眼标定的核心概念与实现方法。相机标定主要获取内参(焦距、像素中心点)及临时外参,而手眼标定则确定相机与机器人坐标系间的变换关系。在Gazebo仿真环境中,可直接获取模拟内参和URDF文件中的标定参数,避免了真实环境中的硬件差异问题。文章详细说明了如何通过ROS2话题获取Gazebo中的相机内参矩阵,并解释了两种标定在机器人视觉系统中的关键作用。
·
这次,我们根据配置好相机的工作空间,进行相机标定的手眼标定,如果需要上次配置的工作空间,可以后台私信我。
一,相机标定
相机标定的核心目标是获取真实相机的内参(包括焦距和像素中心点),以实现二维图像到三维相机坐标系的转换。需要注意的是:在标定过程中,外参表示的是相机坐标系相对于临时标定板坐标系的变换矩阵,这是求解内参时附带得到的参数。而实际应用中,我们需要的外参是通过手眼标定获得的真实世界坐标系转换参数,而非相机标定过程中得到的外参。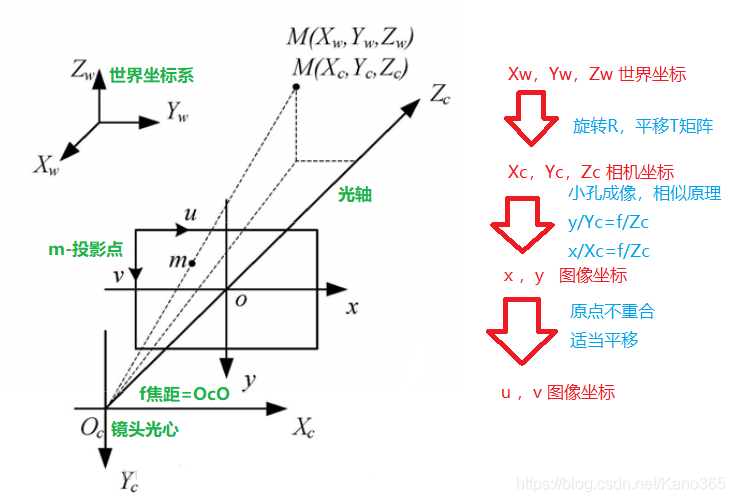
1.1Gazebo环境获取相机内参
由于采用Gazebo进行机械臂仿真,可直接使用模拟内参替代Gazebo环境的内参。而在真实环境中,由于相机硬件存在个体差异,则需要进行相机标定。
直接从话题中获取
ros2 launch luck_gazebo gazebo_moveit.launch.py
ros2 topic list
ros2 topic echo /camera/camera_sensor/camera_info
下图就代表内参矩阵
二,手眼标定
手眼标定核心目的是获取相机坐标系与机器人坐标系之间的精确变换关系。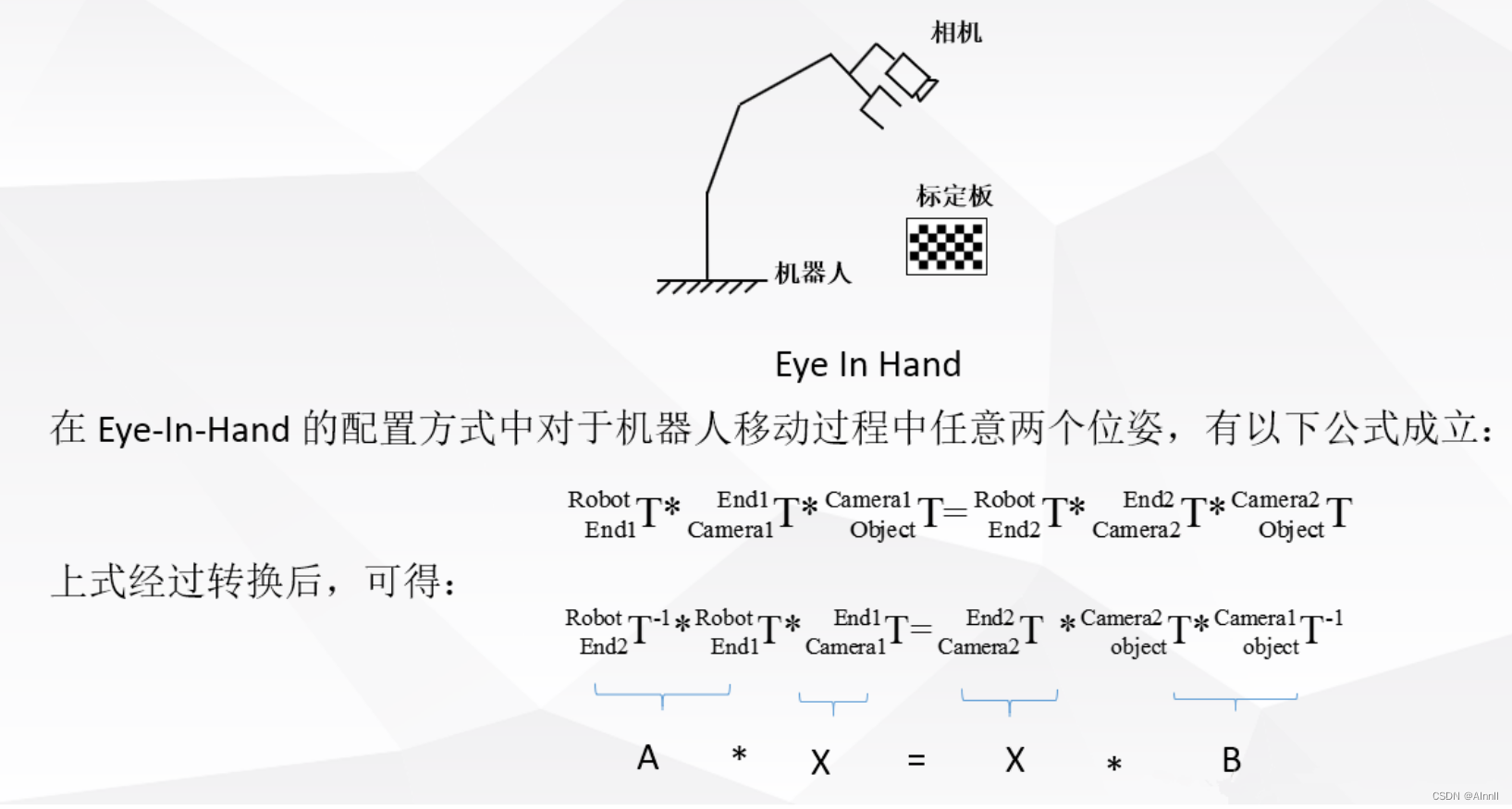
2.1Gazebo环境获取手眼标定参数
因为是在gazebo环境,所以参数不用标定,可以直接使用urdf文件中,相机和末端joint关系表述。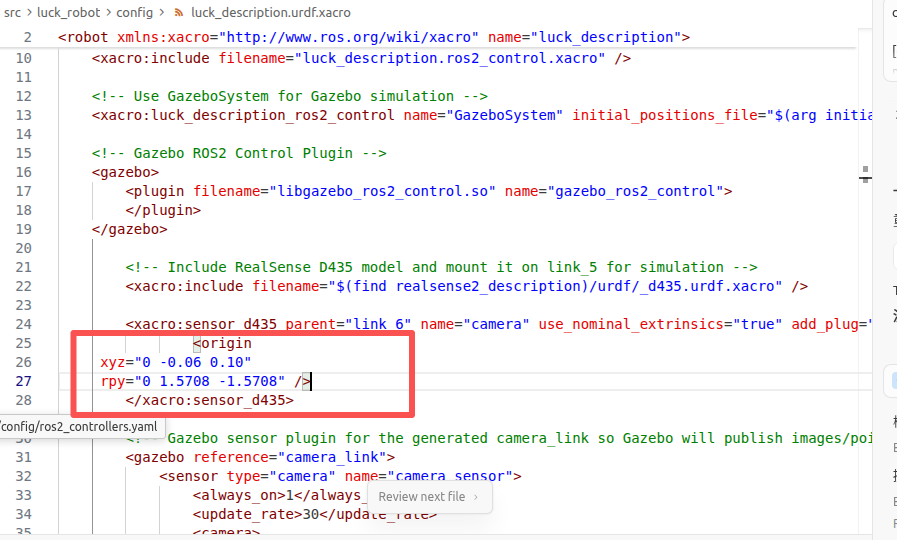

立足具身智能前沿赛道,致力于搭建全球化、开源化、全栈式技术交流与实践共创平台。
更多推荐

 19
19 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)