NavFn全局路径规划算法详解
摘要:NavFn是ROS中的经典全局路径规划算法,通过栅格地图和代价地图,使用Dijkstra/A*算法寻找最优路径。其核心原理类似"水波纹扩散":从终点开始传播势能值,起点沿梯度下降方向回溯形成路径。输入包括代价地图、起点终点坐标和地图参数,输出为全局路径点序列。实现过程分为四步:初始化势能数组、Dijkstra波前扩散、计算梯度场、沿梯度回溯生成路径。该算法适用于规划全局最
NavFn(Navigation Function)是 ROS 中最经典、最常用的 全局路径规划算法,核心是在栅格地图上用 Dijkstra / A* 找一条 “代价最小” 的安全路径。下面用最通俗的方式讲清楚:它在干嘛、输入什么、输出什么、怎么算的。
一、一句话理解 NavFn
NavFn = 栅格地图 + 代价地图 + Dijkstra(或 A)+ 梯度回溯 = 全局最优路径*
- 作用:给机器人从 起点 A 到 目标点 B 规划一条 不撞墙、尽量短、尽量好走 的全局路线。
- 定位:全局规划器(Global Planner),只算大方向、粗路径,不管实时避障(那是局部规划器 DWA 的事)。
二、通俗原理:像 “水波纹扩散” 一样找路
你可以把 NavFn 的过程想象成:在地图上从终点往起点 “放水”,波纹(代价)扩散,最后从起点沿着 “水往低处流” 的方向走回终点。
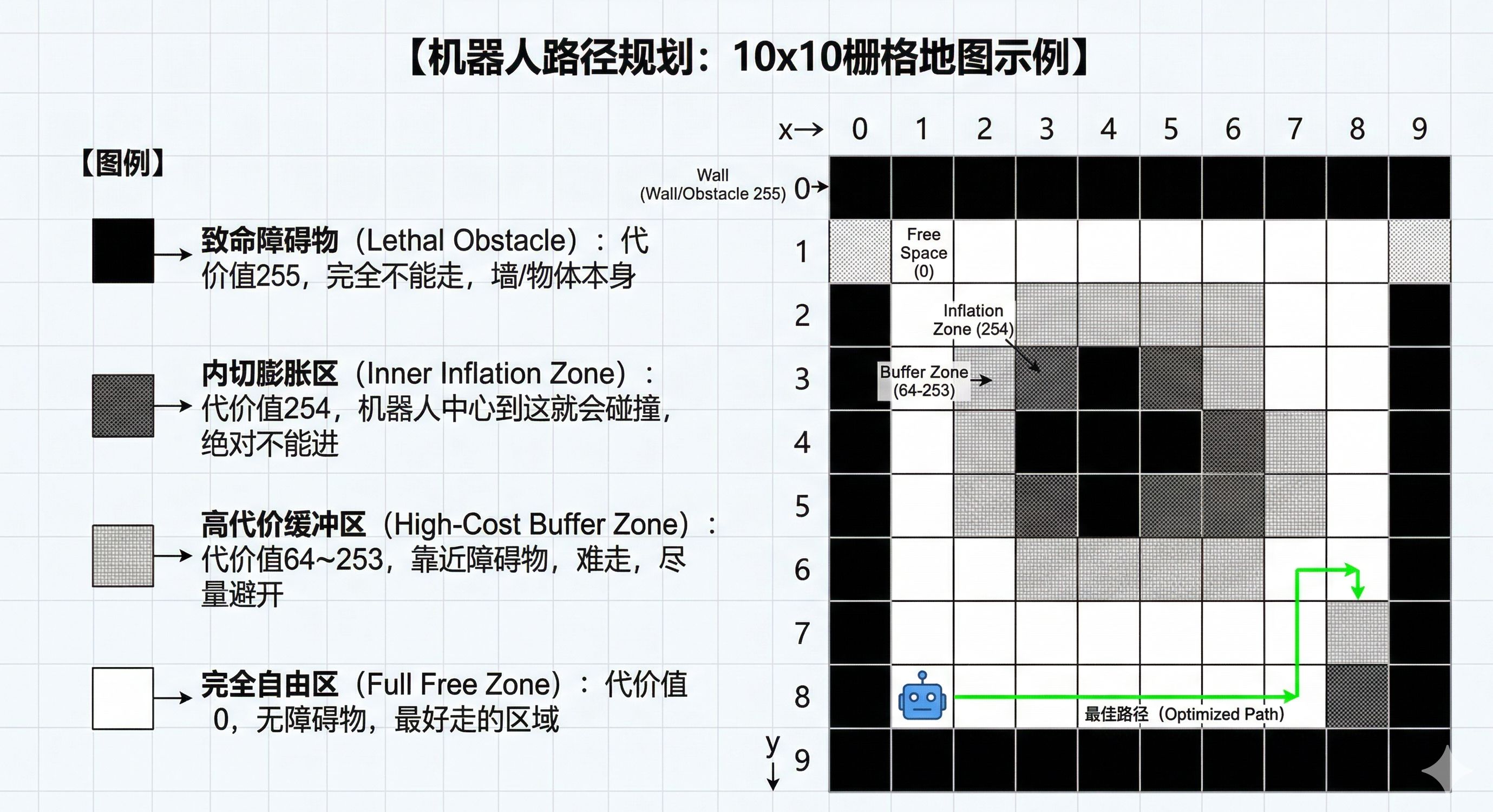
1. 地图是什么样的?(栅格 + 代价)
- 地图被切成一个个小方格(栅格 /cell)。
- 每个格子有 代价 cost:
- 0 = 完全自由(好走)
- 254/255 = 障碍物 / lethal(不能走)
- 中间值 = 代价高 / 难走 / 靠近墙
- 如图所示:
2. 核心四步
- 读入地图与代价:知道哪里能走、哪里是墙、哪里难走。
- 设置起点 & 终点。
- 波前传播(Dijkstra):
- 从 终点 开始,往外一层层扩散(像水波纹)。
- 给每个格子算一个 potential(代价 / 势能):
- 终点代价 = 0
- 离终点越远、路越难走,代价 越大
- 梯度下降找路径:
- 从 起点 出发,每一步都往代价更小的方向走
- 一直走到终点 → 这一串点就是 最优路径.
-
栅格邻居示意图,势能在格子间扩散时,主要考虑上下左右四个邻居(也可扩展到 8 邻域):
上(u)
|
左 --- 当前格(n) --- 右
|
下(d)势能从目标点向外扩散,像水波一样;格子势能 = 邻居最小势能 + 通行代价。
三、输入与输出
1. 输入
必备输入
- 代价地图(Costmap):二维栅格 + 每个栅格的代价值(最核心输入)。
- 起点坐标(x, y):机器人当前位置。
- 目标点坐标(x, y):要去的地方。
- 地图参数:宽、高、分辨率(每个栅格对应现实多少米)。
常用参数
allow_unknown:是否允许穿过 “未知区域”。use_astar:用 A*(更快)还是默认 Dijkstra(更稳、保证最优)。- 机器人半径:算法默认假设是 圆形机器人,自动膨胀障碍物。
2. 输出
主输出:全局路径
- 一串连续的 世界坐标点 (x, y) 序列。
- 从 起点 → ... → 目标点,机器人按顺序走这些点。
- 格式:ROS 中是
nav_msgs/Path消息(含PoseStamped数组)。
内部输出(调试 / 可视化)
- potential 数组:每个栅格的代价值(波纹高度图)。
- 梯度数组:每个点往哪走代价下降(方向场)。
四、核心流程与代码解析
NavFn 的实现可分为 初始化 → 势能扩散 → 梯度计算 → 路径回溯 四步,下面结合 代码逐段解析。
流程 1:初始化与设置(setupNavFn)
这一步负责初始化势能数组、设置边界、将目标点加入待处理队列。
核心代码
Dijkstra 算法入口
bool NavFn::calcNavFnDijkstra(bool atStart)
{
setupNavFn(true); // 初始化势能数组
return propNavFnDijkstra(std::max(nx * ny / 20, nx + ny), atStart);
}
void NavFn::setupNavFn(bool keepit)
{
// 1. 初始化势能数组为高值(表示未访问)
for (int i = 0; i < ns; i++) {
potarr[i] = POT_HIGH; // POT_HIGH 近似无穷大
}
// 2. 设置边界为障碍物(防止机器人走出地图)
// ... 省略边界设置代码,核心是将四周边界设为 COST_OBS
// 3. 初始化优先级缓冲区(用于 Dijkstra 波前传播)
curP = pb1; curPe = 0; // 当前优先级队列
nextP = pb2; nextPe = 0; // 下一优先级队列
overP = pb3; overPe = 0; // 溢出缓冲区
// 4. 设置目标点势能为 0,并加入待处理队列
int k = goal[0] + goal[1] * nx; // 目标点在数组中的索引
initCost(k, 0); // 目标点势能 = 0
}对应公式(势能初始化):
所有格子初始势能为无穷大,仅目标点势能为 0。
流程 2:Dijkstra 势能扩散(propNavFnDijkstra + updateCell)
这是 NavFn 的核心:从目标点开始,像水波纹一样向外扩散,计算每个格子的最小势能。
核心代码 1:扩散循环
Dijkstra 波前传播主循环
bool NavFn::propNavFnDijkstra(int cycles, bool atStart)
{
int startCell = start[1] * nx + start[0]; // 起点格子索引
for (; cycle < cycles; cycle++) {
// 1. 检查缓冲区是否为空(无格子可扩展)
if (curPe == 0 && nextPe == 0) break;
// 2. 处理当前优先级队列中的所有格子
pb = curP;
i = curPe;
while (i-- > 0) {
updateCell(*pb++); // 核心:更新单个格子的势能
}
// 3. 交换缓冲区:当前队列处理完,切换到下一队列
curPe = nextPe;
nextPe = 0;
std::swap(curP, nextP);
// 4. 如果当前队列为空,从溢出缓冲区补充(提高优先级阈值)
if (curPe == 0) {
curT += priInc; // 提高优先级阈值
curPe = overPe;
overPe = 0;
std::swap(curP, overP);
}
// 5. 检查是否到达起点(可选优化:到达起点即停止)
if (atStart && potarr[startCell] < POT_HIGH) {
break; // 找到起点,停止传播
}
}
}核心代码 2:单个格子势能更新
更新单个格子的势能(核心计算逻辑)
inline void NavFn::updateCell(int n)
{
// 1. 获取上下左右四个邻居的势能值
float l = potarr[n - 1]; // 左邻居
float r = potarr[n + 1]; // 右邻居
float u = potarr[n - nx]; // 上邻居
float d = potarr[n + nx]; // 下邻居
// 2. 找出水平和垂直方向的最小势能
float ta, tc;
if (l < r) tc = l; else tc = r; // 水平方向最小
if (u < d) ta = u; else ta = d; // 垂直方向最小
// 3. 计算新势能值(平面波更新,考虑二次插值)
float hf = costarr[n]; // 当前格子的通行代价
float dc = fabs(tc - ta); // 两个最小邻居的势能差
float pot;
if (dc >= hf) {
// 简单情况:直接取最小邻居 + 当前代价
pot = min(ta, tc) + hf;
} else {
// 复杂情况:二次插值,更精确地估计势能
float d = dc / hf;
float v = -0.2301 * d * d + 0.5307 * d + 0.7040; // 经验系数
pot = min(ta, tc) + hf * v;
}
// 4. 如果势能值降低了,更新并传播给邻居
if (pot < potarr[n]) {
potarr[n] = pot; // 更新当前格子势能
// 将邻居加入待处理队列(根据势能大小分队列)
if (pot < curT) {
push_next(n - 1); // 左邻居
push_next(n + 1); // 右邻居
push_next(n - nx); // 上邻居
push_next(n + nx); // 下邻居
} else {
push_over(n - 1); // 势能较高,加入溢出队列
// ... 省略其他邻居的 push_over
}
}
}对应公式(势能扩散更新)
下一个格子
q的势能 = min (原值,当前格子p的势能 + 移动代价c(p,q))。
流程 3:梯度计算(gradCell)
势能扩散完成后,需要计算每个格子的梯度(即 “水往低处流” 的方向)。
核心代码
计算单个格子的梯度
float NavFn::gradCell(int n)
{
float cv = potarr[n];
float dx = 0.0, dy = 0.0;
// 梯度 = 左右/上下邻居的势能差
if (potarr[n - 1] < POT_HIGH) dx += potarr[n - 1] - cv; // 左
if (potarr[n + 1] < POT_HIGH) dx += cv - potarr[n + 1]; // 右
if (potarr[n - nx] < POT_HIGH) dy += potarr[n - nx] - cv; // 上
if (potarr[n + nx] < POT_HIGH) dy += cv - potarr[n + nx]; // 下
// 归一化梯度(得到单位方向向量)
float norm = hypot(dx, dy);
gradx[n] = dx / norm; // x 方向梯度
grady[n] = dy / norm; // y 方向梯度
}流程 4:路径回溯(calcPath)
最后从起点出发,沿梯度方向 “下坡”,一步步走到终点,生成路径。
核心代码
int NavFn::calcPath(int n, int * st)
{
int stc = start[1] * nx + start[0]; // 起点格子索引
float dx = 0.0, dy = 0.0; // 起点在格子内的偏移
for (int i = 0; i < n; i++) {
// 检查是否接近目标(势能足够小)
if (potarr[stc] < COST_NEUTRAL) {
return npath; // 到达目标
}
// 计算当前格子及相邻格子的梯度(用于双线性插值)
gradCell(stc);
gradCell(stc + 1);
gradCell(stc + nx);
gradCell(stc + nx + 1);
// 双线性插值:计算精确的连续梯度方向
float x = (1.0 - dx) * gradx[stc] + dx * gradx[stc + 1];
float y = (1.0 - dy) * grady[stc] + dy * grady[stc + 1];
// 沿梯度方向移动一步(步长为 pathStep)
float ss = pathStep / hypot(x, y);
dx += x * ss;
dy += y * ss;
// 处理格子边界:如果偏移超出当前格子,切换到相邻格子
while (dx >= 1.0) { dx -= 1.0; stc += 1; }
while (dx < 0.0) { dx += 1.0; stc -= 1; }
while (dy >= 1.0) { dy -= 1.0; stc += nx; }
while (dy < 0.0) { dy += 1.0; stc -= nx; }
// 记录路径点(转换为世界坐标)
pathx[npath] = stc % nx + dx;
pathy[npath] = stc / nx + dy;
npath++;
}
return npath;
}
立足具身智能前沿赛道,致力于搭建全球化、开源化、全栈式技术交流与实践共创平台。
更多推荐
 11
11 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)