三相逆变器控制器设计:02基于DQ轴解耦的三相离网逆变器的电压电流双闭环控制器参数设计(附MATLAB代码)
本文针对T型三电平逆变器的电流闭环参数设计进行了详细分析。首先基于dq轴解耦控制模型,讨论了数字PWM延时和采样电路零阶保持延迟环节的建模方法,推导了其传递函数表达式。在电流内环设计中,通过PI控制器对消大惯性环节,将系统转化为典型Ⅰ型系统,并计算出Kpi=20、Kii=533.3的参数。电压外环采用典型Ⅱ型系统设计,得到Kpu=0.04、Kiu=53.3的参数。最后通过添加低通滤波器有效抑制了系
参考视频:【T型三电平逆变器5】电流闭环参数计算_哔哩哔哩_bilibili
上文根据三相逆变器的本体模型,给出了基于dq轴解耦的控制器框图。同时,由于d轴分量与q轴分量的模型零极点完全相同,因此只需要设计出d轴分量的控制器参数,q轴分量保持一致即可。本文将按照上文得出的逆变器d轴分量控制器模型进行进一步的分析与讨论,并给出控制器的设计过程。
目录
1. 关于电力电子数字控制内容的补充
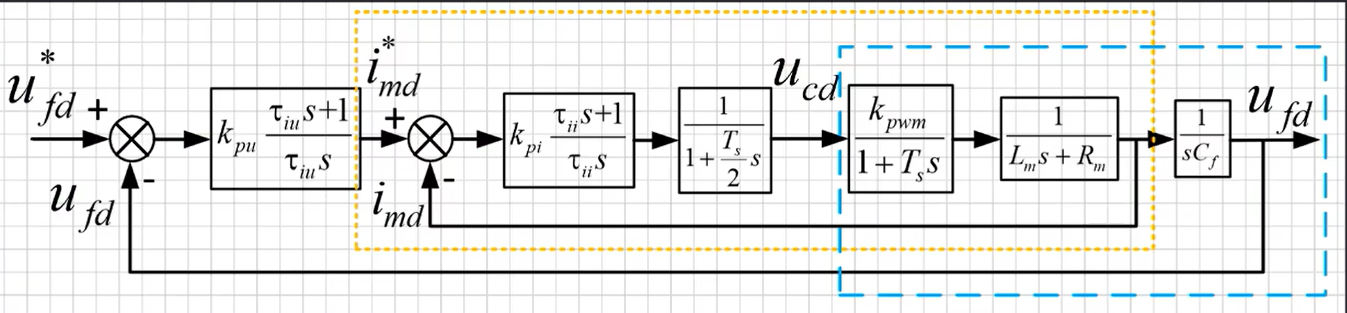
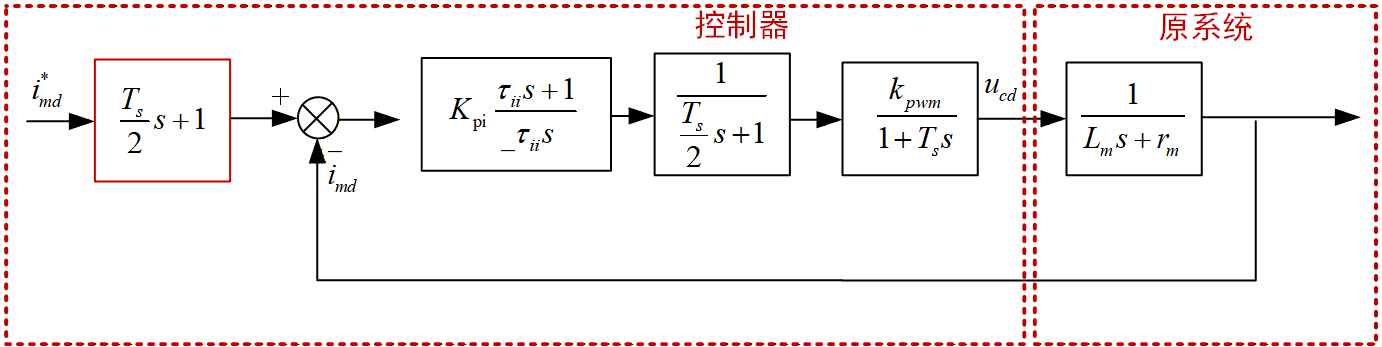
下图给出了上文的得到的dq轴解耦后的d轴分量电压电流双闭环控制框图,下面对其中出现的数字控制器造成的延时环节进行推导补充。
1.1 数字PWM延时过程
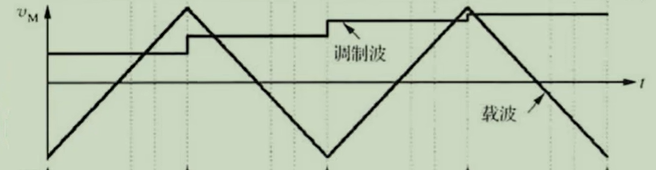
下图给出了数字PWM的发波过程,假设epwm中断在三角载波ZERO/PRD两个状态触发,并在中断中进行adc采样以及pid/pr等控制器的运算。其造成延时的关键点在于:在本周期运算出的占空比结果并不会立刻于计算周期内更新,而是由于shadow寄存器的作用在下一周期进行更新。由此可以得出:数字PWM会带来一个中断周期Ts的延时。
推导其传递函数可以得出,在s域下的延时环节表示为,再由泰勒级数展开后省略高阶部分,则可以得到
这样的一阶小惯性环节。由此可以得到上图中的pwm部分表达式,此处的Kpwm取为1,其原因在下一章对于SVPWM学习的过程中会给出。
1.2 采样电路零阶保持延迟过程
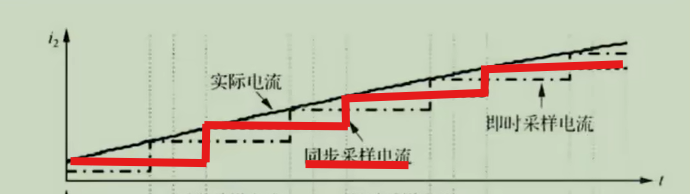
下图给出了数字adc采样转换的过程,如图所示,红色部分即为实际adc采集到的电流,将每个红色部分的中点连接,就可以得到等效得到的电流,可以看出等效电流比实际电流之后1/2拍,也即是Ts/2。由上述泰勒展开过程,即可得到控制框图中的结果。
此处需要讨论的是,视频中的采样延时环节直接加在了前项通路中,然而根据实际分析,其过程加在反馈通路更为合适。
在此,也可以通过简单的近似变换得到上述的结果。
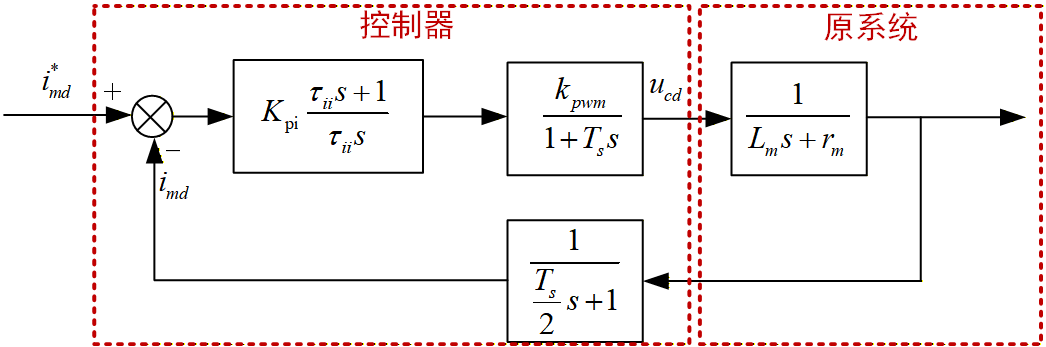
上图给出了实际的电流环控制框图,将采样延时环节提到整个环路外部,得下图:
由于Ts/2是一个很小的值,对应信后的频段极高,因此,可以直接化简掉,便得到了本文一开始的控制框图。
2. 控制器参数
本次的控制器参数如下:(关于参数设计这里沿用视频:【T型三电平逆变器5】电流闭环参数计算_哔哩哔哩_bilibili,后续将单独学习)
| 滤波电容Cf/uF | 10 |
| 滤波电感Lm/mH | 3 |
| 电感等效内阻r/Ω | 0.08 |
| 控制频率fs/kHz | 20 |
| 输入电压Uin/V | 750 |
| 输出相电压有效值Uorms/V | 220 |
3. 电流内环参数设计
3.1 控制对象分析
下图给出了电流内环的控制框图,如图所示,电流环PI控制器的主要目的便是对蓝色框内的部分进行补偿,因此这里需要先得出蓝色框内系统的开环传递函数,再结合PI控制器的传递函数进行补偿操作。
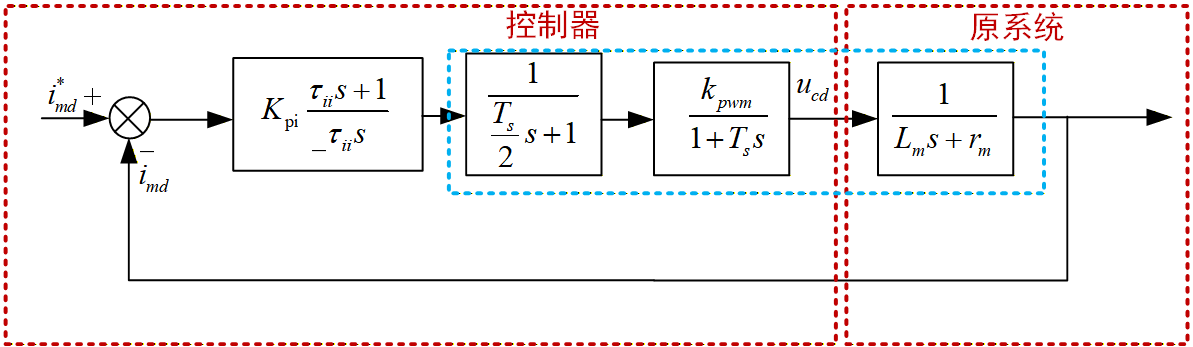
首先,对于pwm延时以及adc采样延时,由于二者分别通过与
泰勒展开化简而来,因此可以合并。经合并后蓝色框内部的传递函数为:
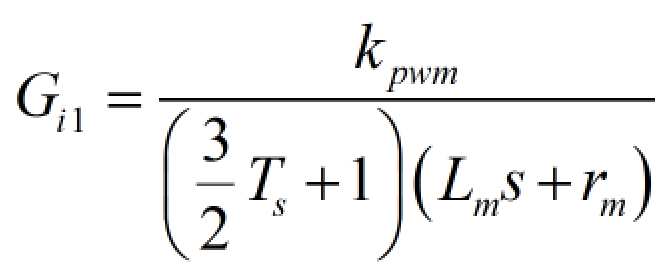
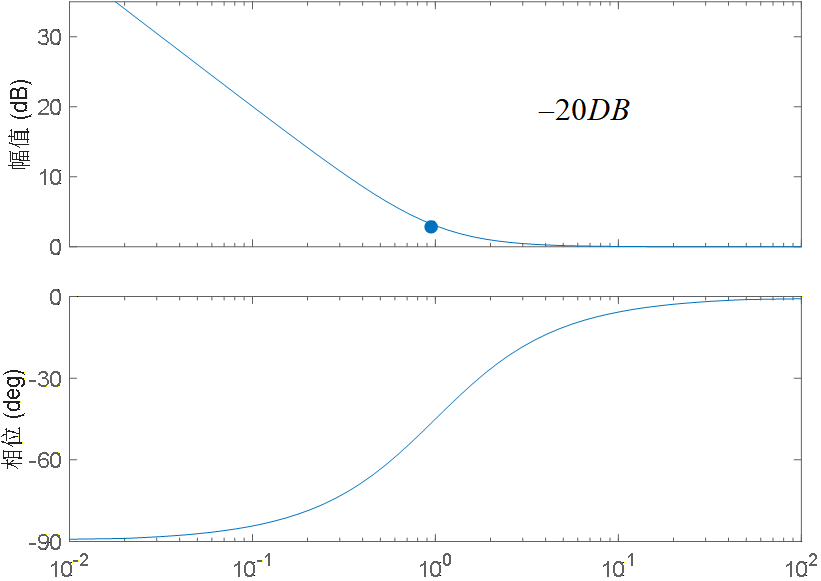
取kpwm为1,则可以绘制出Gi1的bode图:
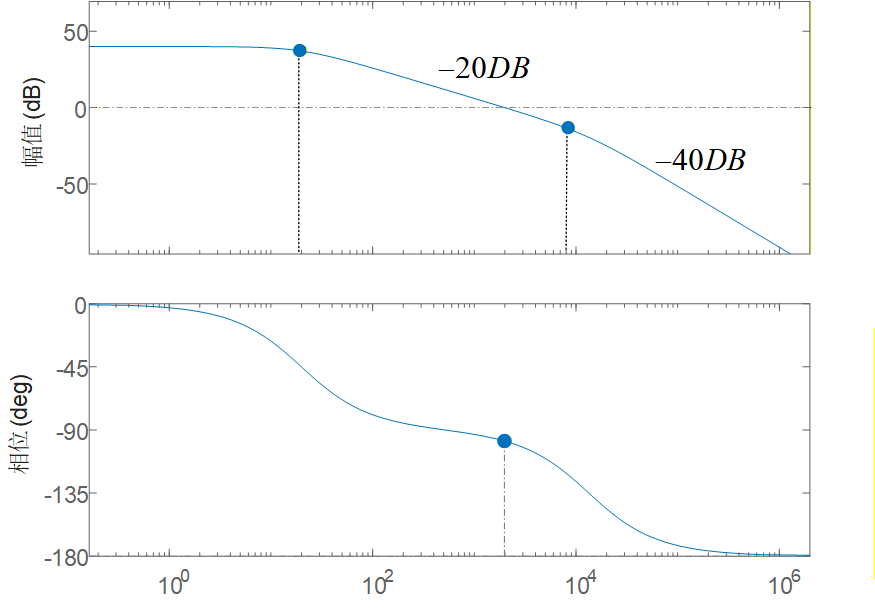
从传递函数与bode图均可以看出,Gi1具有一个大惯性环节与一个小惯性环节,如果用PI控制器消去一个惯性环节,把整个电流环开环传递函数变成典型Ⅰ型系统,便可以大大简化参数设计的难度。
一般的,可以用PI控制器的分子消去其后项部分的大惯性环节分母,即可得到典型Ⅰ型环节。至于为何消去大惯性环节而不消去小惯性环节,主要有以下几点原因:
首先,小惯性环节的时间常数并不是一个固定值。小惯性环节时间常数往往与系统的寄生参数以及数字控制器延时有关,在本设计示例中,小惯性环节的时间常数取决于DSP的控制周期Ts。然而,此处的pwm与adc延时只是简单取的可能延时的最大值,因此其值并不固定,这对于补偿器设计而言显然是不利的。
其次,为了保证系统的稳定性。下面给出了PI控制器的bode图,如图所示,如果PI控制器与小惯性环节对消,则会造成系统直接在中频段以40dB的斜率穿越0dB线。这会造成系统不稳定或及其容易不稳定,因此在设计上是必须避免的。
3.2 设计电流环参数
电流环的开环传递函数如下:
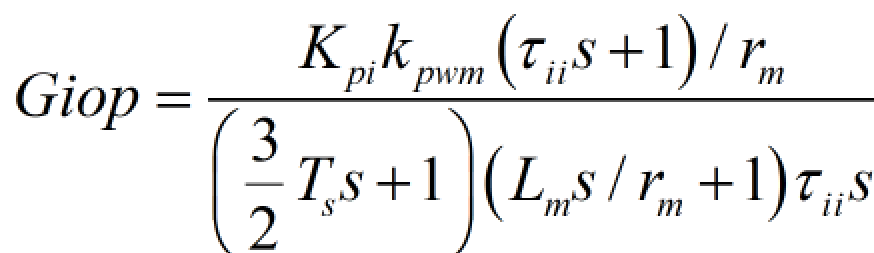
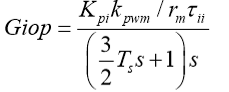
使用PI补偿对消掉大惯性环节,则tii = Lm/rm,得到如下传递函数:
已知一阶典型惯性环节为:
![]()
且当KT=0.5时,得到最佳性能,则有:
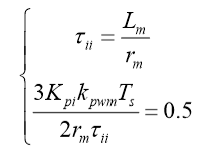
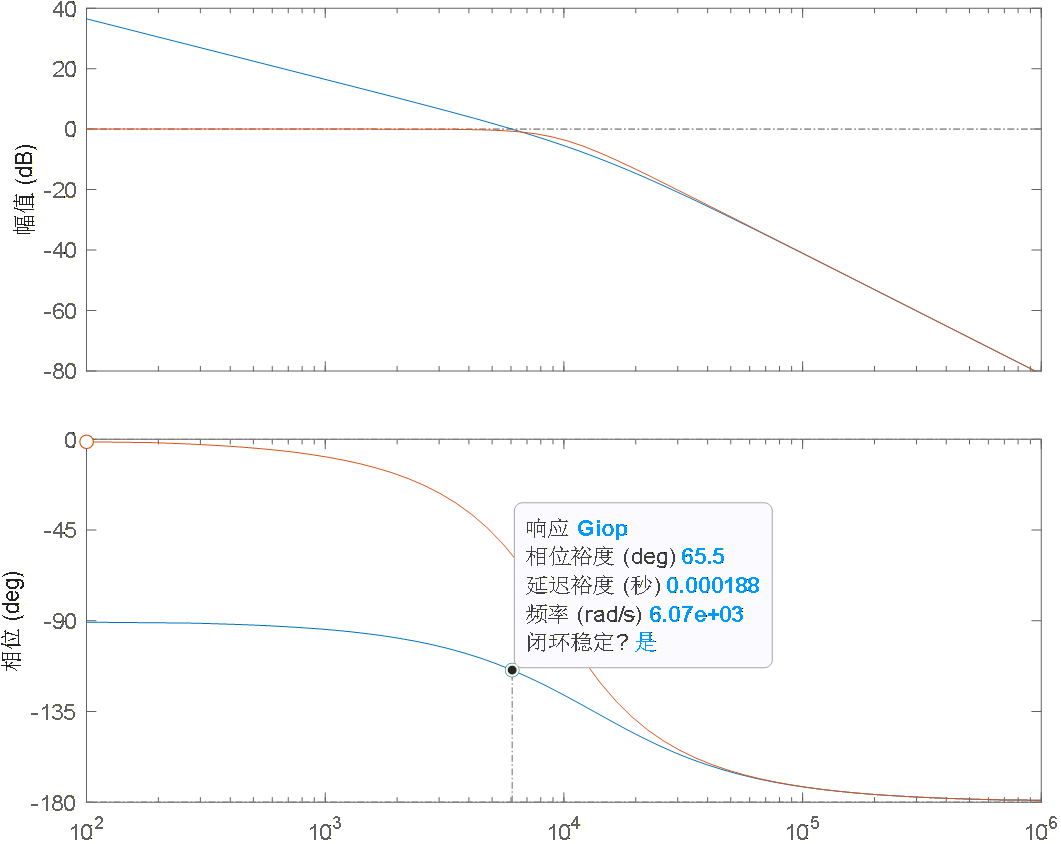
可以解出Kpi = 20,Kii = 533.3。下面给出了电流内环的bode图,如图所示可以得出,电流内环的截止频率为6070rad/s,即996hz,相位裕度为65.5°。对于三相离网逆变器,其电流环带宽有如下要求:1、通常选择基波频率的10-30倍。2、不超过开关频率的1/5 ~ 1/10。
4. 设计电流环参数
4.1 简化电流环
电流环设计完成之后,可以得到其闭环传递函数:
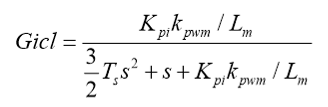
由于Ts极小,对应频段为高频段,且频率极高,因此可以直接将其对应的高阶项忽略掉,此时的电流环传递函数就变为:
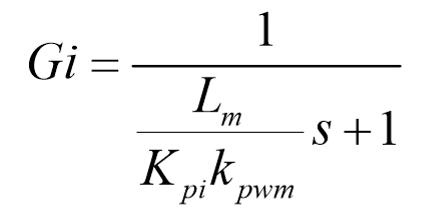
4.2 设计电压环参数
至此,整个控制框图可以化简为:
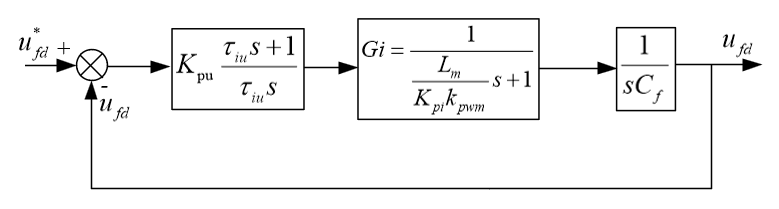
由此可以得出,在设计电压环PI补偿器时,可以将整个系统简化成一个典型Ⅱ阶系统,同样利用经验公式整定PI控制器的参数。
至此可以得到整个系统的开环传递函数为:
对应典型Ⅱ阶系统,其传递函数为:
其中定义h=t/T,K=(h+1)/2h^2T^2,根据经验,h=5时,系统获得最优性能。将该关系代入到开环传递函数中,可以得到:
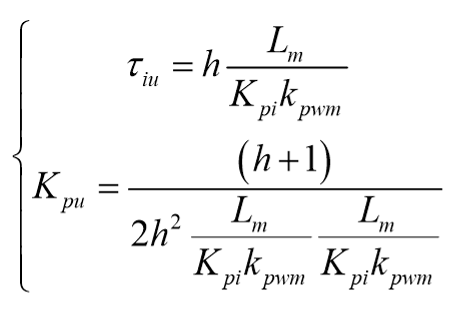
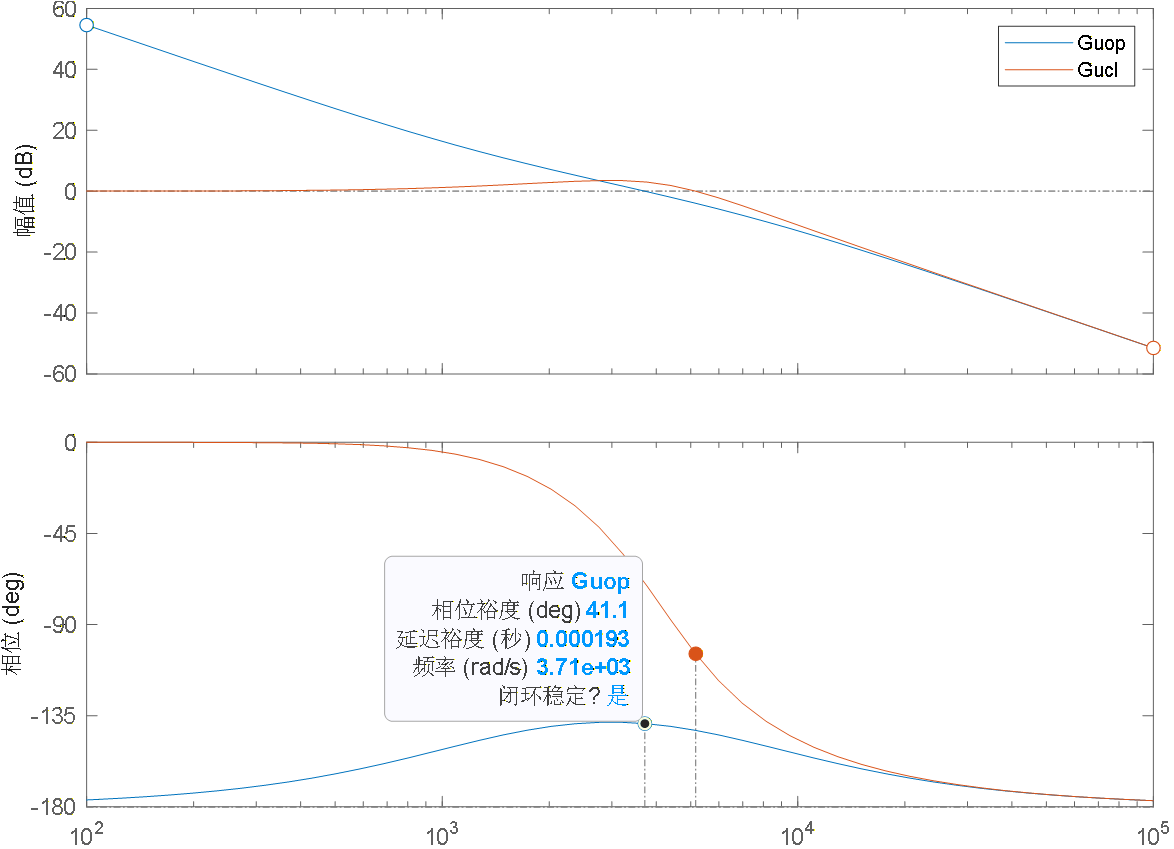
代入h=5,可以解出:Kpu = 0.04,Kiu = 53.3。下面给出了加入电压外环后整个系统的bode图,如图所示,外环系统具有较小的带宽,其目的是获得更好的抗扰动性能。
同时,由于电压环具有较小的带宽,在设计电压环时忽略了由于电压采样而带来的小惯性环节延时。
4.3 超调抑制
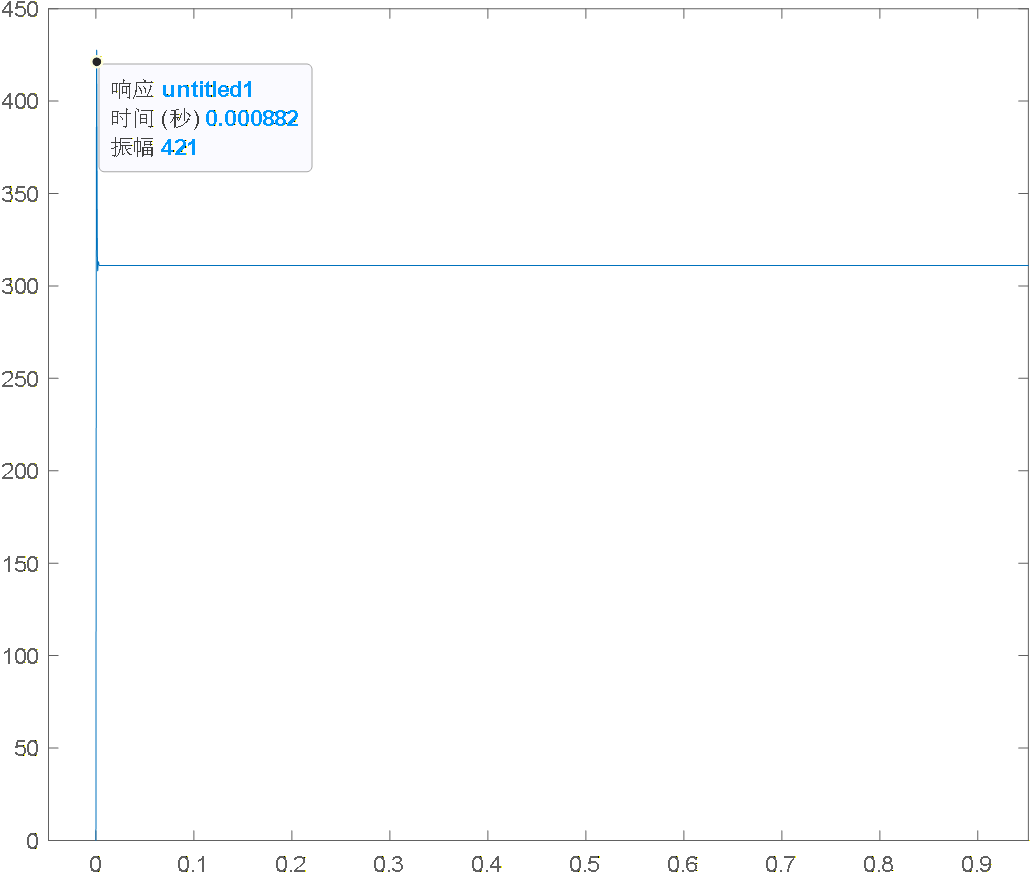
下面给出了整个系统给定输出Uf为311V时的阶跃响应,如图所示,该阶跃响应具有较大的超调量。为了解决此问题,工程上一般会在整个系统的输入端添加一个低通滤波器,滤波器的时间常数一般取控制周期的4倍。
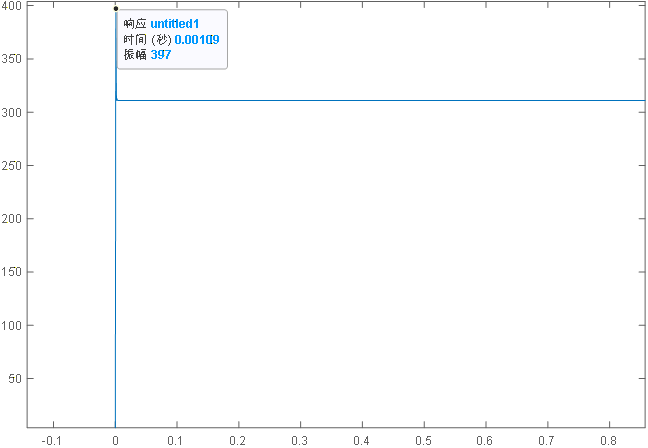
下图为加入低通滤波器后的系统阶跃响应图,如图所示,整个系统超调得到了一定改善。
5. 附:MATLAB计算代码
clc;
clear;
close all;
%参数设计
kpwm = 1;
Cf = 0.000010;
Lm = 0.003;
rm = 0.08;
Uin = 750;
Uorms = 220;
fs = 20000;
Ts = 1/fs;
s = tf('s');
%电流环参数设计
Gi1 = kpwm/((1.5*Ts*s+1)*(Lm*s+rm));
bode(Gi1)
title("Gi1伯德图")
tii = Lm/rm;
Kpi = Lm/(3*Ts*kpwm);
Kii = Kpi/tii;
Kpi
Kii
tii
Giop = (Kpi*kpwm/Lm)/s/(1.5*Ts*s+1);
Gicl = Giop/(1+Giop);
figure;
bode(Giop,Gicl)
title("电流环伯德图")
figure;
step(20*Gicl,1);
title("电流环阶跃响应")
Gicl
%电压环参数设计
h=5;
tiu=h*Lm/(Kpi*kpwm);
Kpu=Cf*tiu*(h+1)/(2*h^2*(Lm/(Kpi*kpwm))^2);
Kiu=Kpu/tiu;
tiu
Kpu
Kiu
Guop=Kpu/(Cf*tiu)*(tiu*s+1)/(s^2*(Lm/(Kpi*kpwm)*s+1));
Gucl=Guop/(1+Guop);
figure;
bode(Guop,Gucl)
title("电压电流双闭环伯德图")
figure;
step(311*Gucl,1);
title("加低通滤波器前系统最终阶跃响应")
%加入低通滤波器
LPF=1/(4*Ts*s+1);
Gcl = LPF*Gucl;
figure;
bode(Gucl,Gcl)
title("加低通滤波前后的闭环伯德图")
figure;
step(311*Gcl,1)
title("加入低通滤波器后系统最终阶跃响应")
立足具身智能前沿赛道,致力于搭建全球化、开源化、全栈式技术交流与实践共创平台。
更多推荐

 14
14 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)