实测分享 | RK3588+Ubuntu20.04 环境下 Fast-LIO SLAM 结合 Livox MID360 部署与验证
本文分享RK3588+Ubuntu20.04环境下,Fast-LIO SLAM与Livox MID360激光雷达的部署流程,含节点启动、数据录制与回放步骤,实测建图效果完整无漂移,满足实时性需求,为同类硬件适配提供参考。
在机器人与自动驾驶领域,激光 SLAM 的实时性和精度直接决定系统性能,Fast-LIO 凭借轻量、高效的特性成为热门选择,而 Livox MID360 激光雷达则以高帧率、大视场角优势适配各类场景。本文基于 RK3588 开发板 + Ubuntu20.04 环境,实测 Fast-LIO 结合 MID360 的 SLAM 部署流程,完整还原从启动节点到数据录制、回放的全流程,为同类硬件适配提供参考。
一、环境基础
硬件平台:RK3588 开发板(Ubuntu20.04 系统)核心组件:Fast-LIO(激光 SLAM 算法)、Livox ROS Driver2(MID360 驱动)、ROS Noetic传感器:Livox MID360 激光雷达
二、核心操作流程
步骤 1:启动 Fast-LIO 建图节点(终端 1)
首先需加载 ROS 工作空间环境变量,启动 Fast-LIO 针对 MID360 的建图 launch 文件,该文件已适配 MID360 的点云格式与参数配置:
source devel/setup.bash
roslaunch fast_lio mapping_mid360.launch步骤 2:启动 Livox MID360 驱动节点(终端 2)
单独启动雷达驱动节点,确保 MID360 的点云数据能通过 ROS 话题正常发布,与 Fast-LIO 节点完成数据通信:
source devel/setup.bash
roslaunch livox_ros_driver2 msg_MID360.launch
步骤 3:录制 ROS 话题数据(终端 3)
为留存实测数据、便于后续复现与分析,启动 rosbag 全量录制所有话题(也可指定话题以减小文件体积):
rosbag record -a三、实测效果展示
完成上述节点启动后,Fast-LIO 可实时接收 MID360 的点云数据并完成建图,实测建图效果如下:
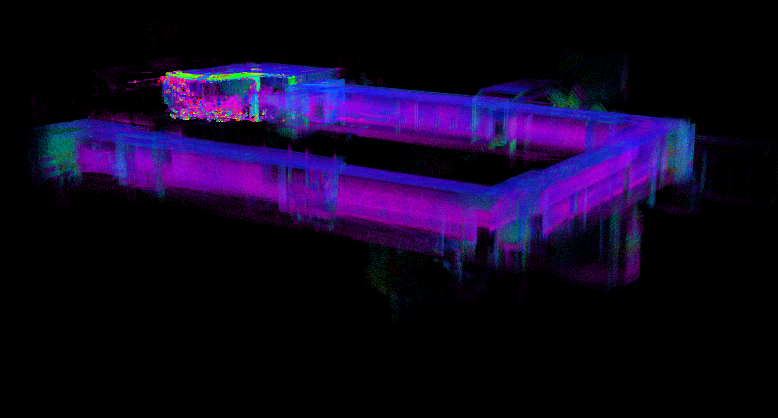
从建图结果可见,场景特征还原完整,点云拼接无明显漂移,在 RK3588 平台下满足实时性要求。
四、数据回放验证
实测完成后,可通过 rosbag 回放录制的数据包,复现建图过程或验证算法鲁棒性,指令如下:
rosbag play xx.bag # 替换xx.bag为实际录制的数据包名称五、小结
本次在 RK3588+Ubuntu20.04 环境下,完成了 Fast-LIO 与 Livox MID360 的端到端部署验证,核心流程简洁且可复现。需注意的是,实际部署时需根据硬件场景微调 launch 文件中的雷达参数、算法帧率阈值等,以适配不同应用场景的精度与实时性需求。

立足具身智能前沿赛道,致力于搭建全球化、开源化、全栈式技术交流与实践共创平台。
更多推荐

 6
6 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)