PLECS学习记录19:三相逆变器输出电流的闭环控制传递函数推导及仿真
PLECS学习记录:三相逆变器输出电流的闭环控制传递函数推导及仿真
传递函数推导:
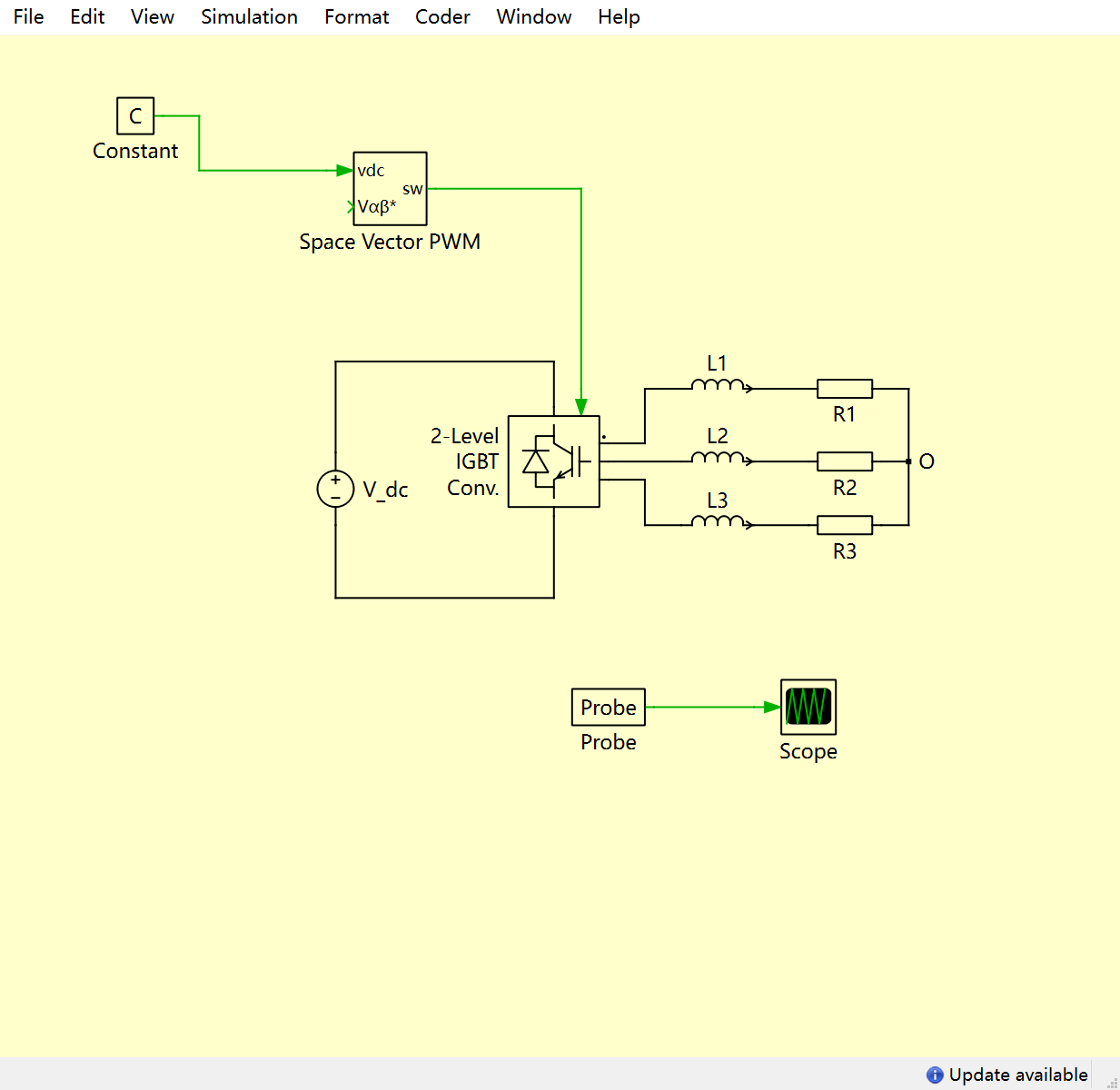
三相逆变器主电路图如下图所示:
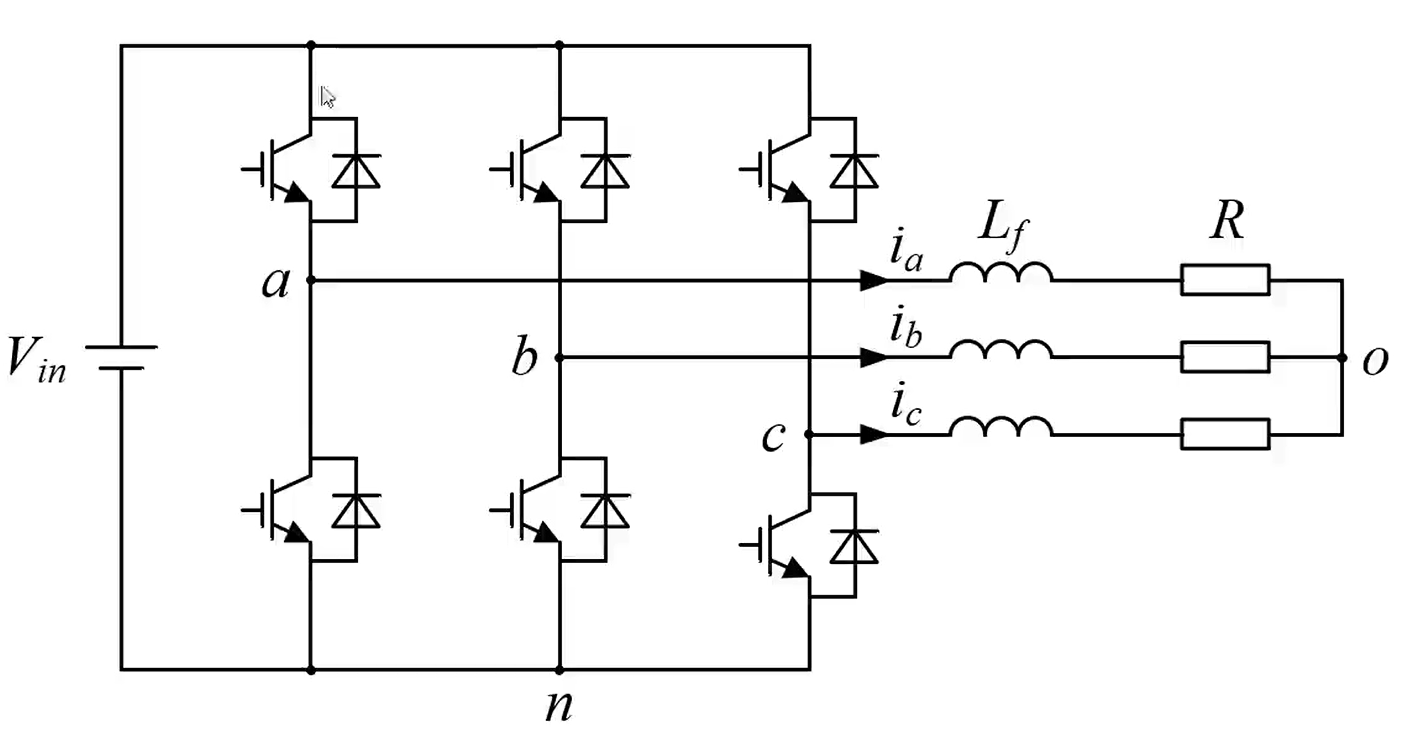
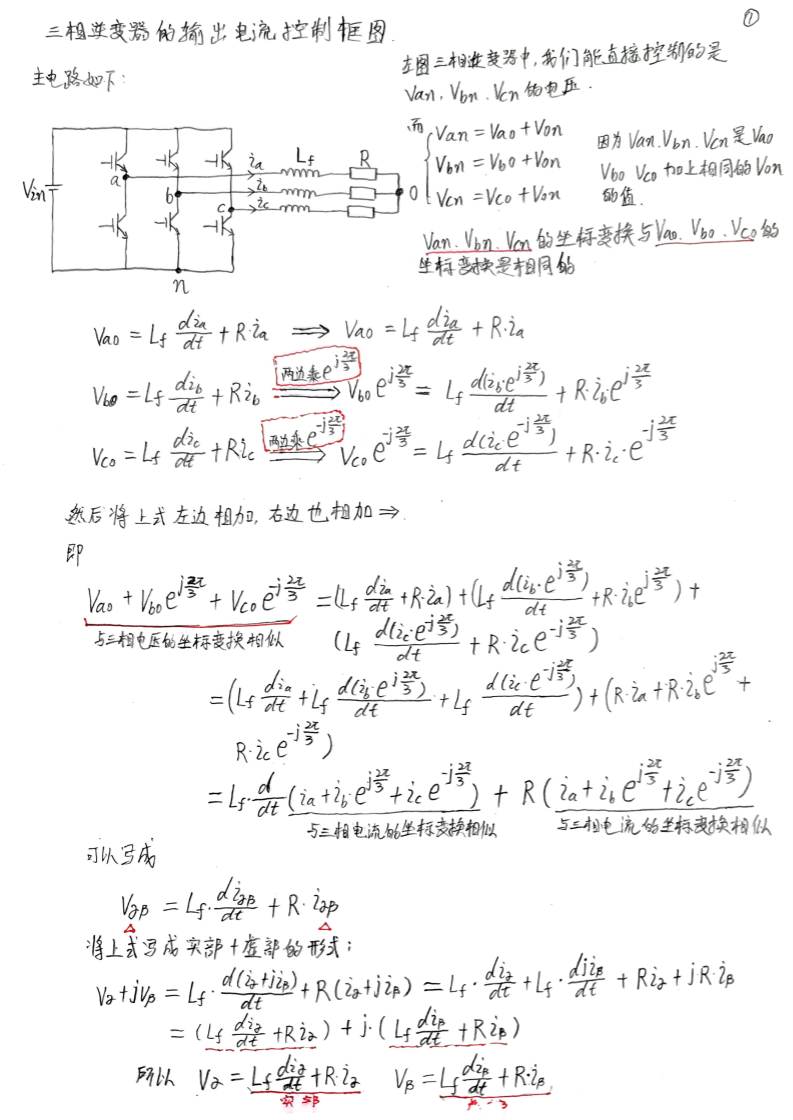
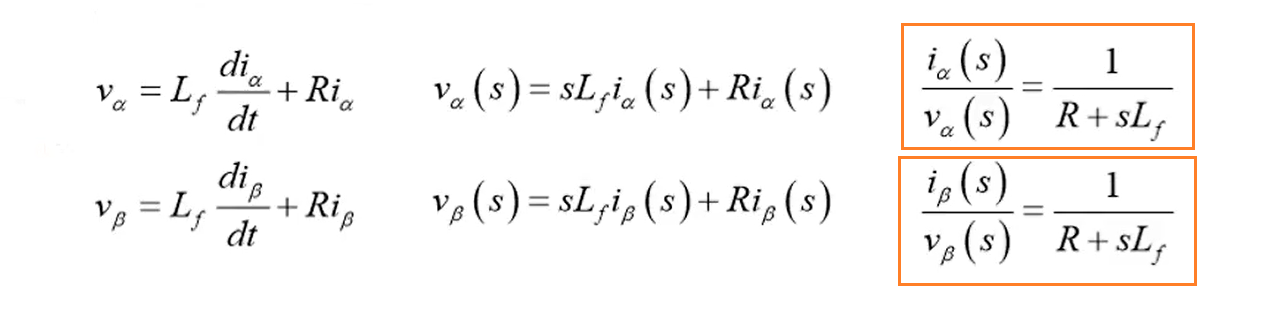
对于它的输出电流推导过程如下(手写):
仿真开始:
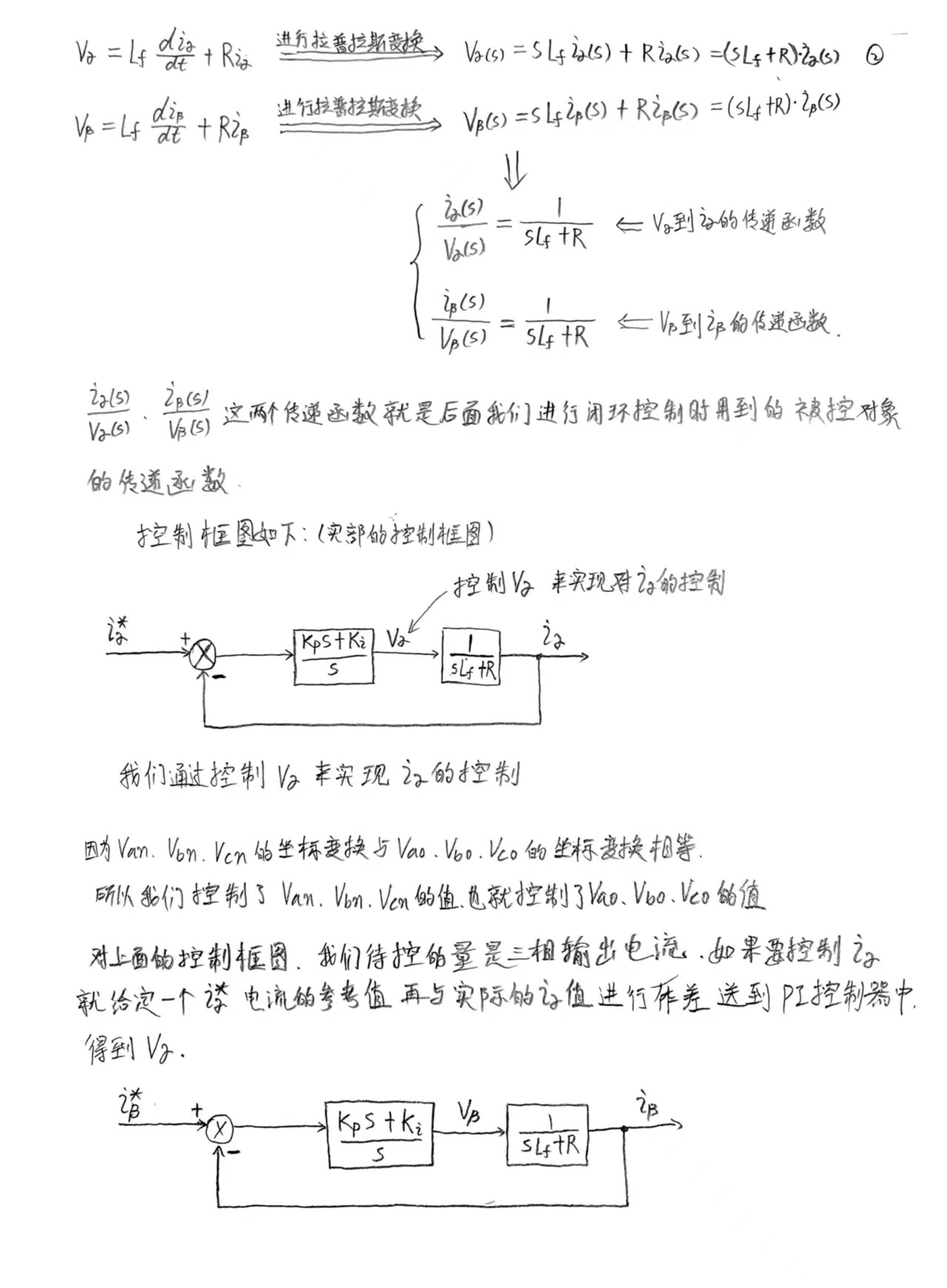
上面,推导出三相逆变器的闭环控制模型如下图所示:
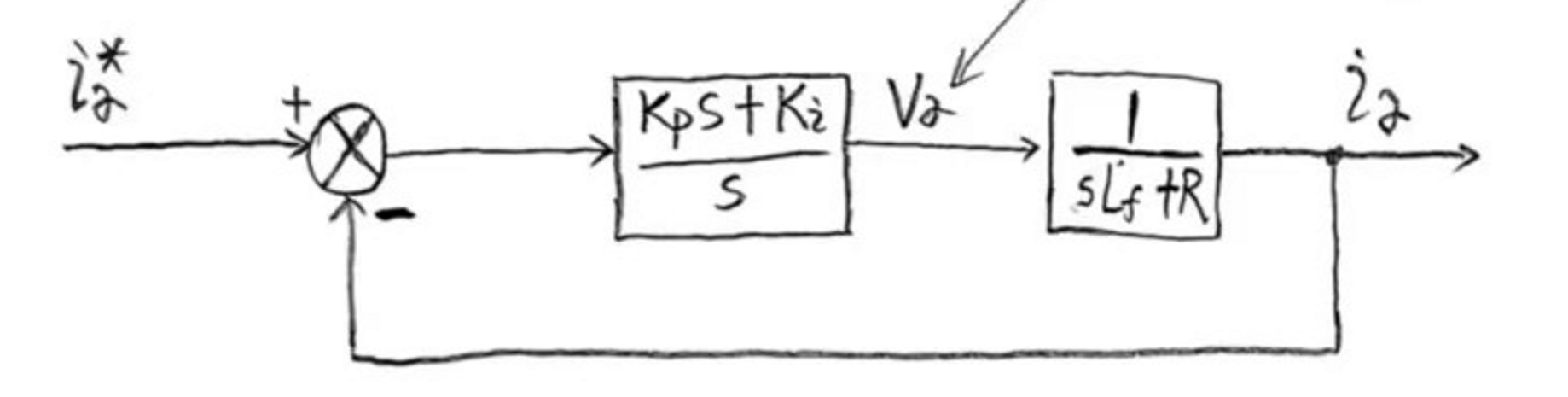
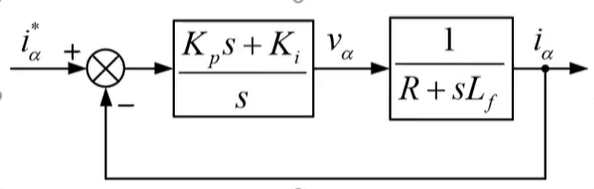
α轴的控制模型如下图:
β轴的控制模型如下图:
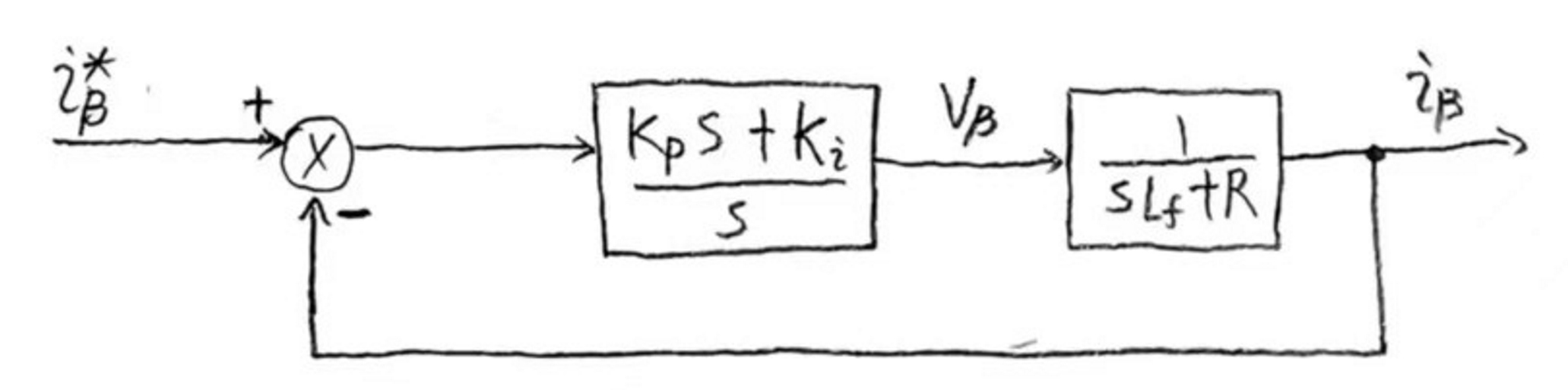
传递函数如下图:
然后就可以根据控制框图来在plecs中搭建仿真电路:
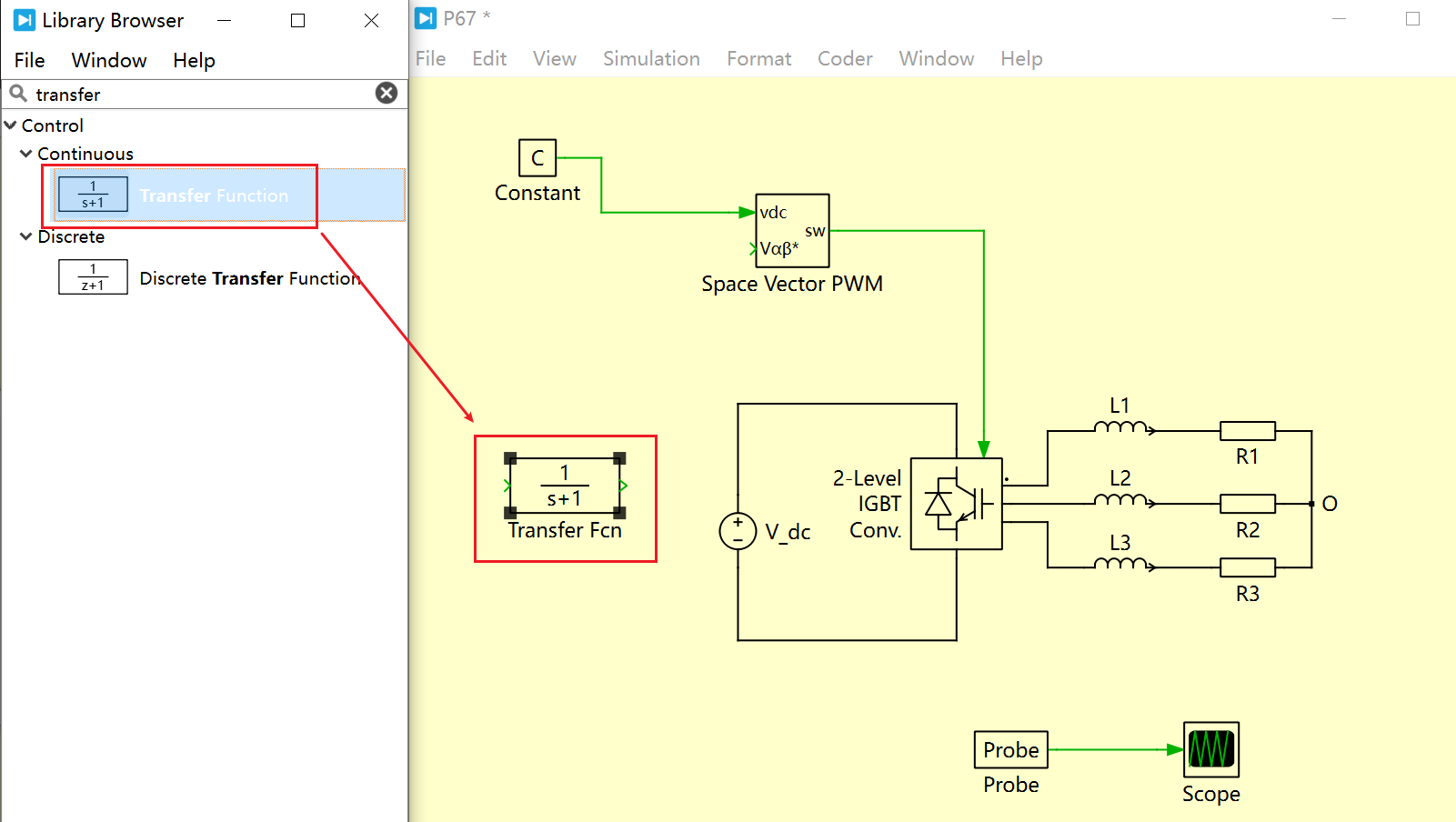
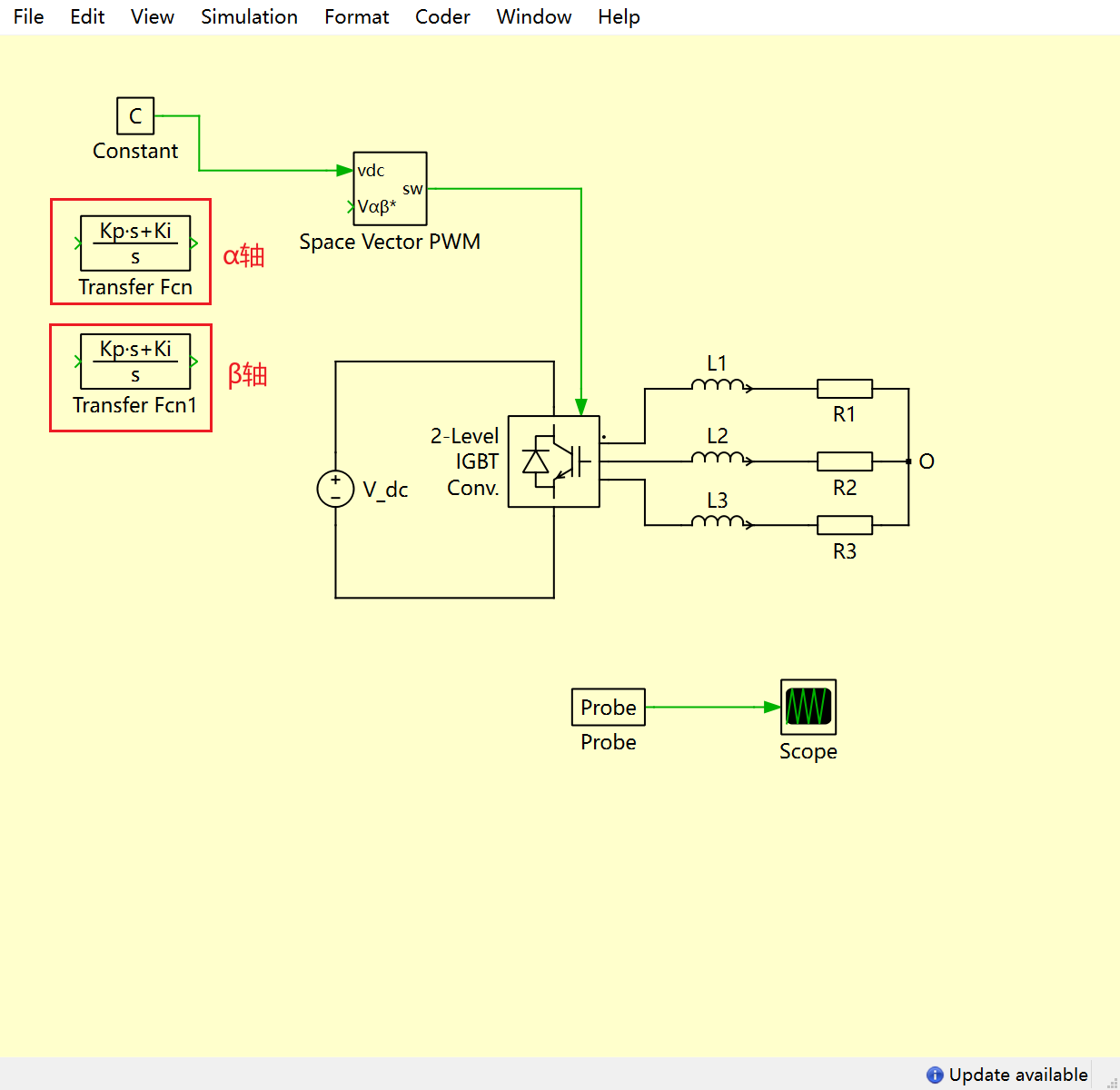
在记录18的仿真电路的基础上进行修改,删除原先的控制信号:
添加传递函数模块,并设置传递函数为PI控制:
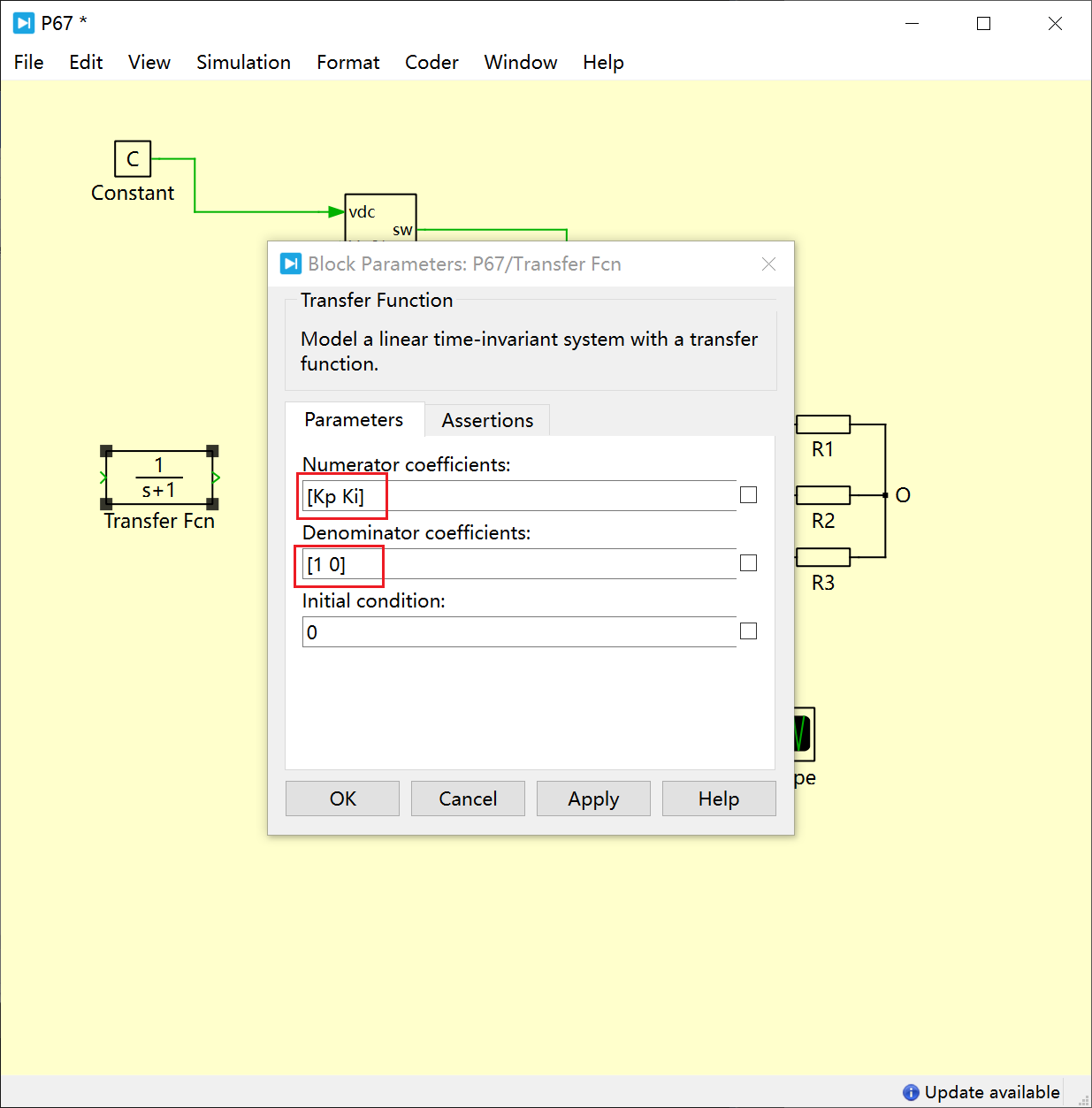
添加再复制一份传递函数,组成两个PI控制器分别用于控制α轴、β轴:
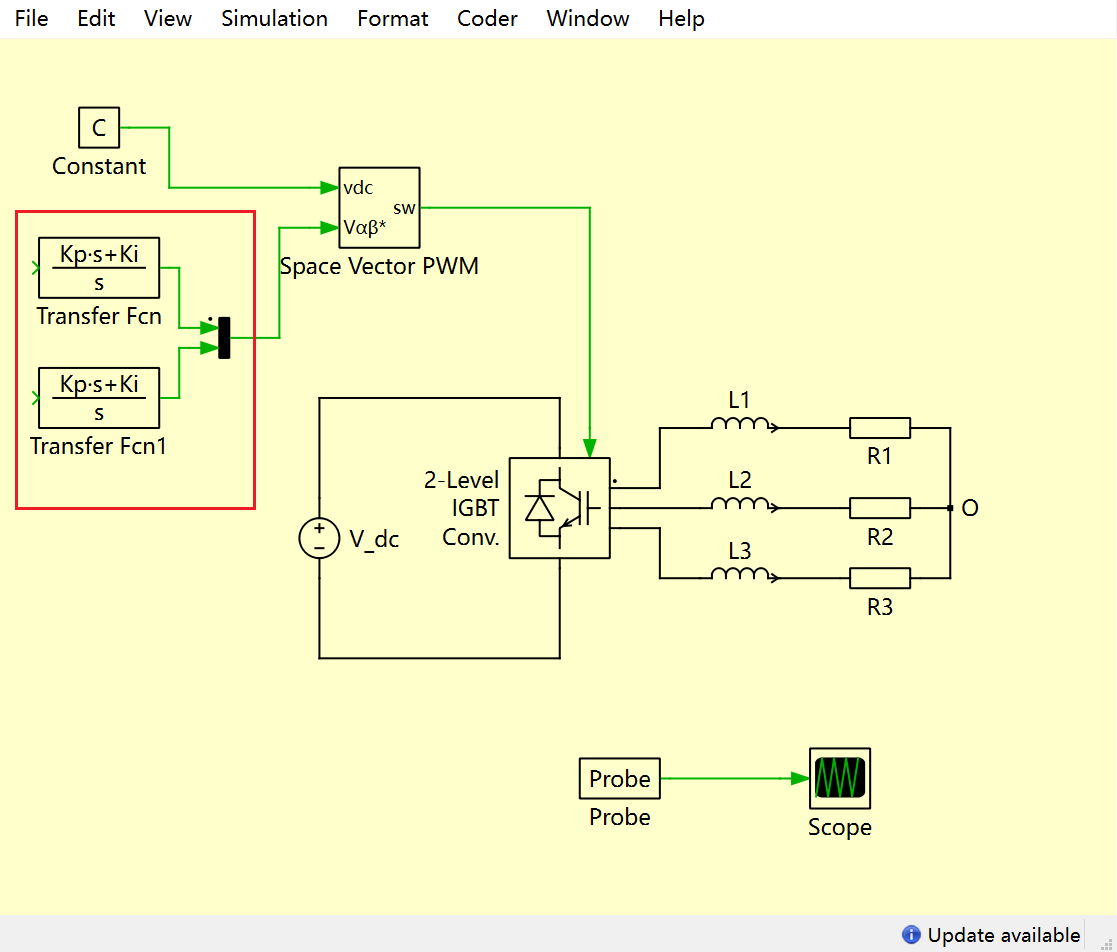
添加一个混合模块将PI输出信号混合:
添加参考信号:
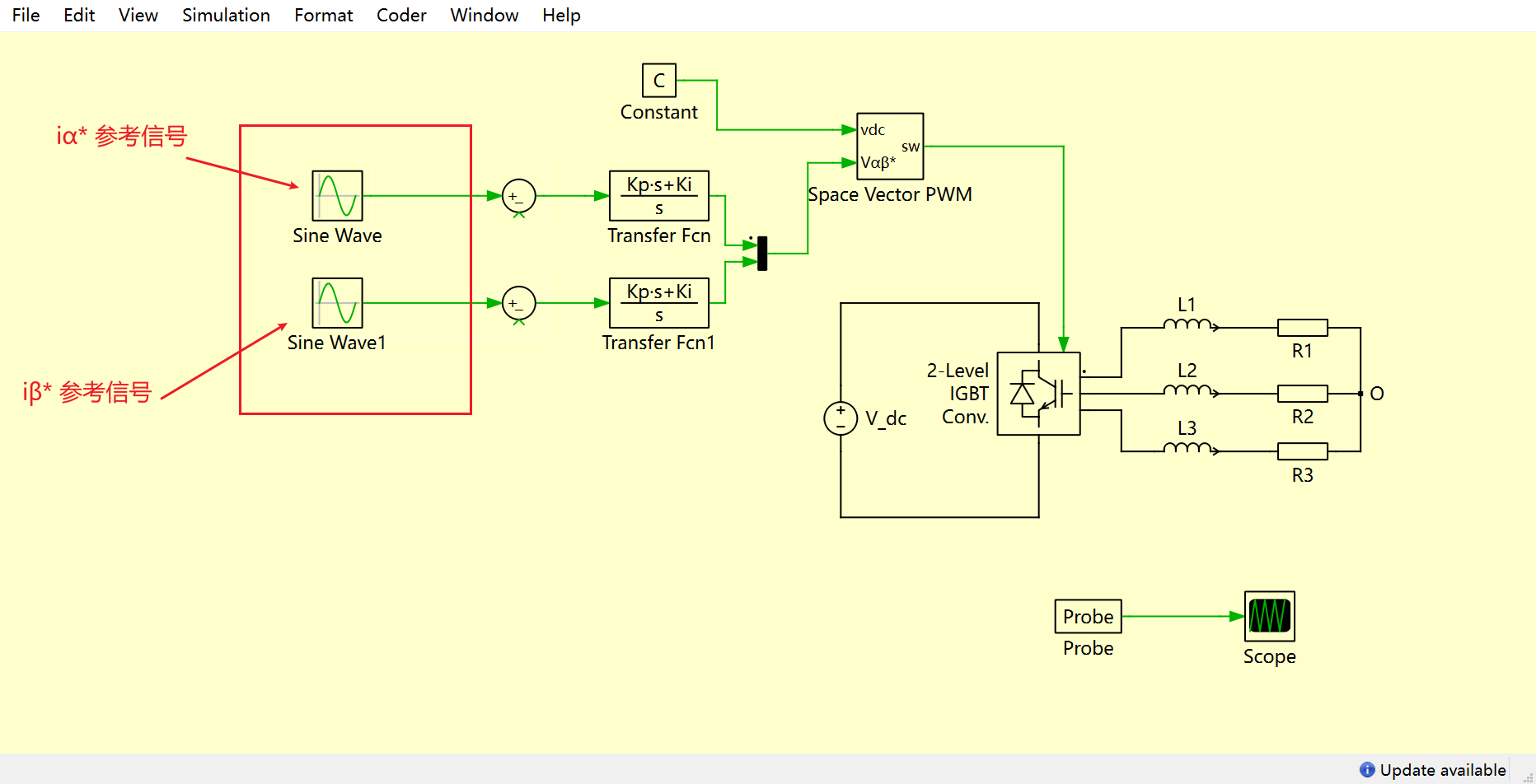
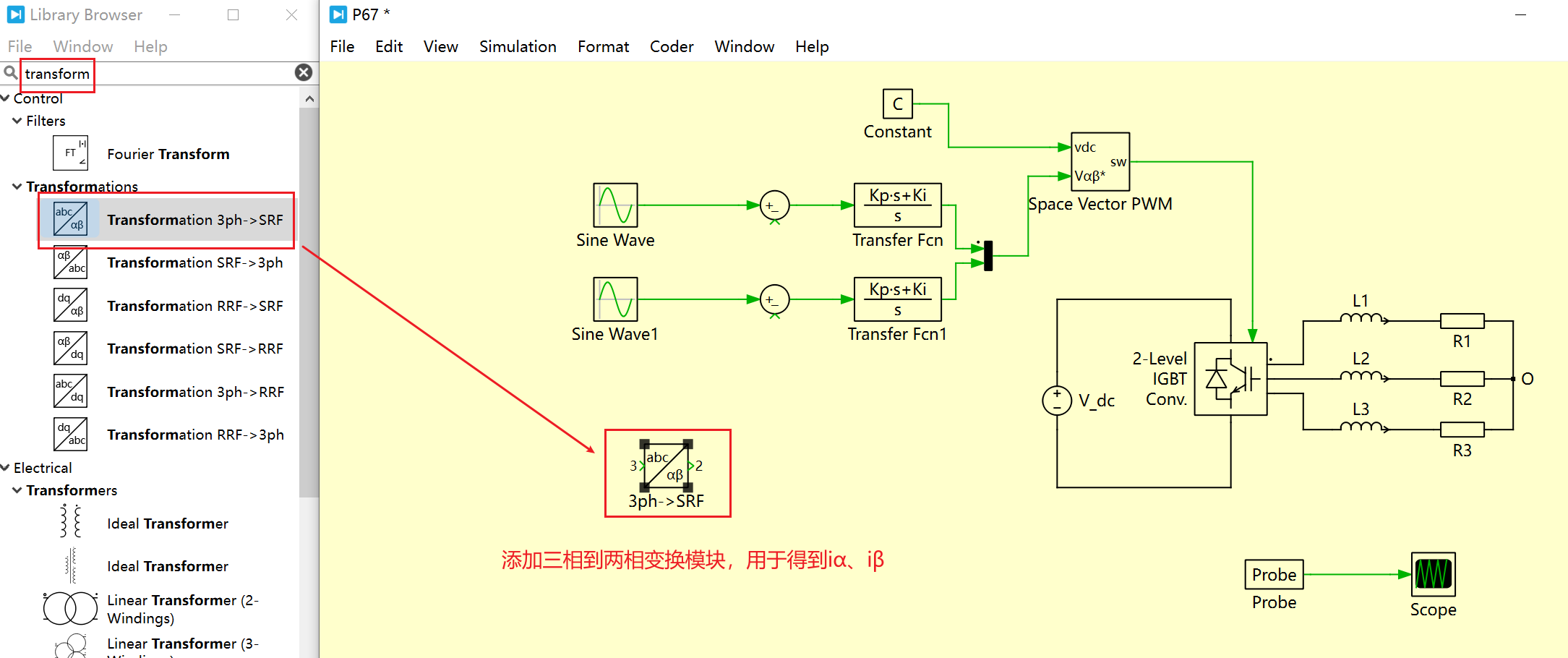
添加三相到两相模块:
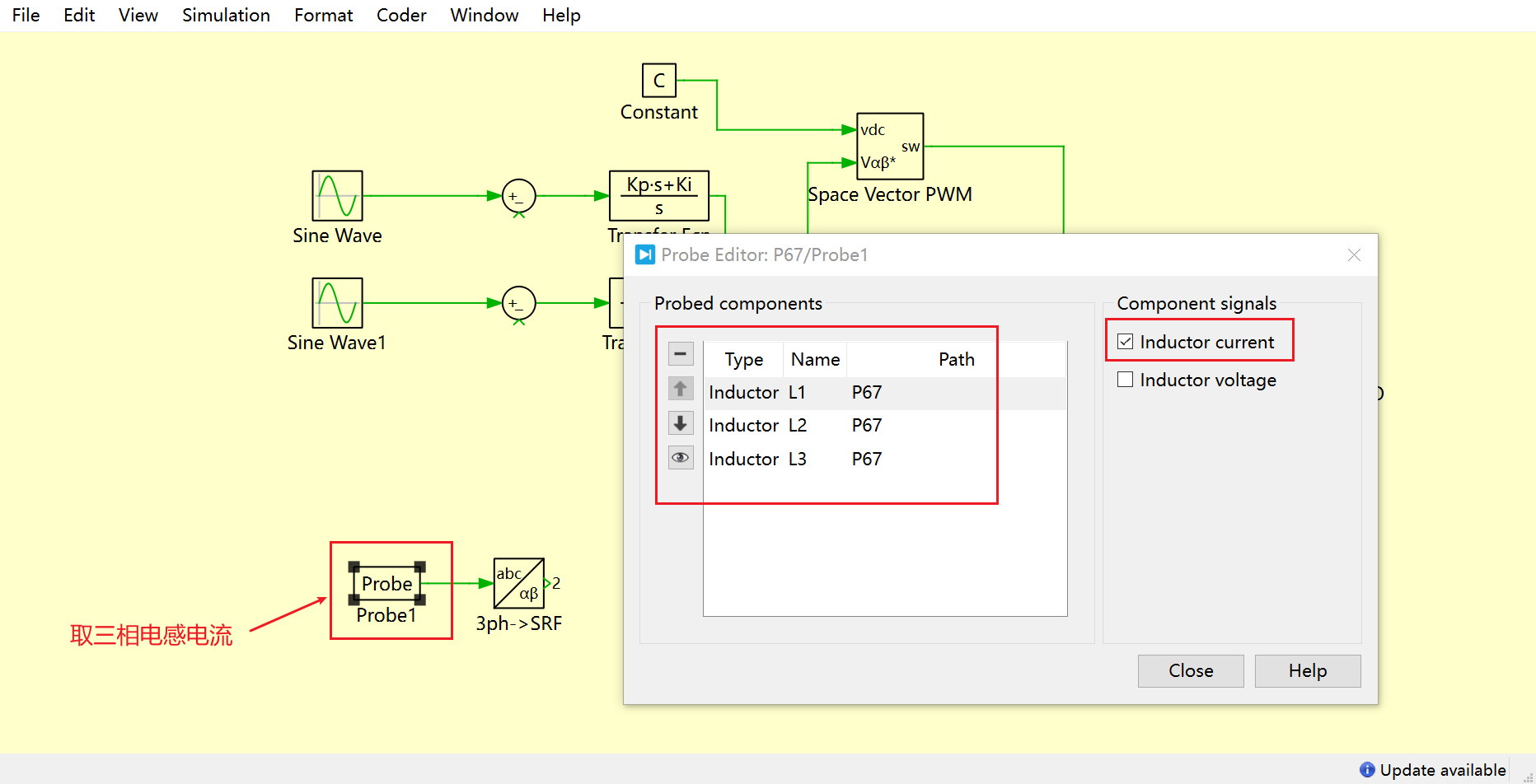
将三相电感电流输入 三相到两相模块,得到iα、iβ:
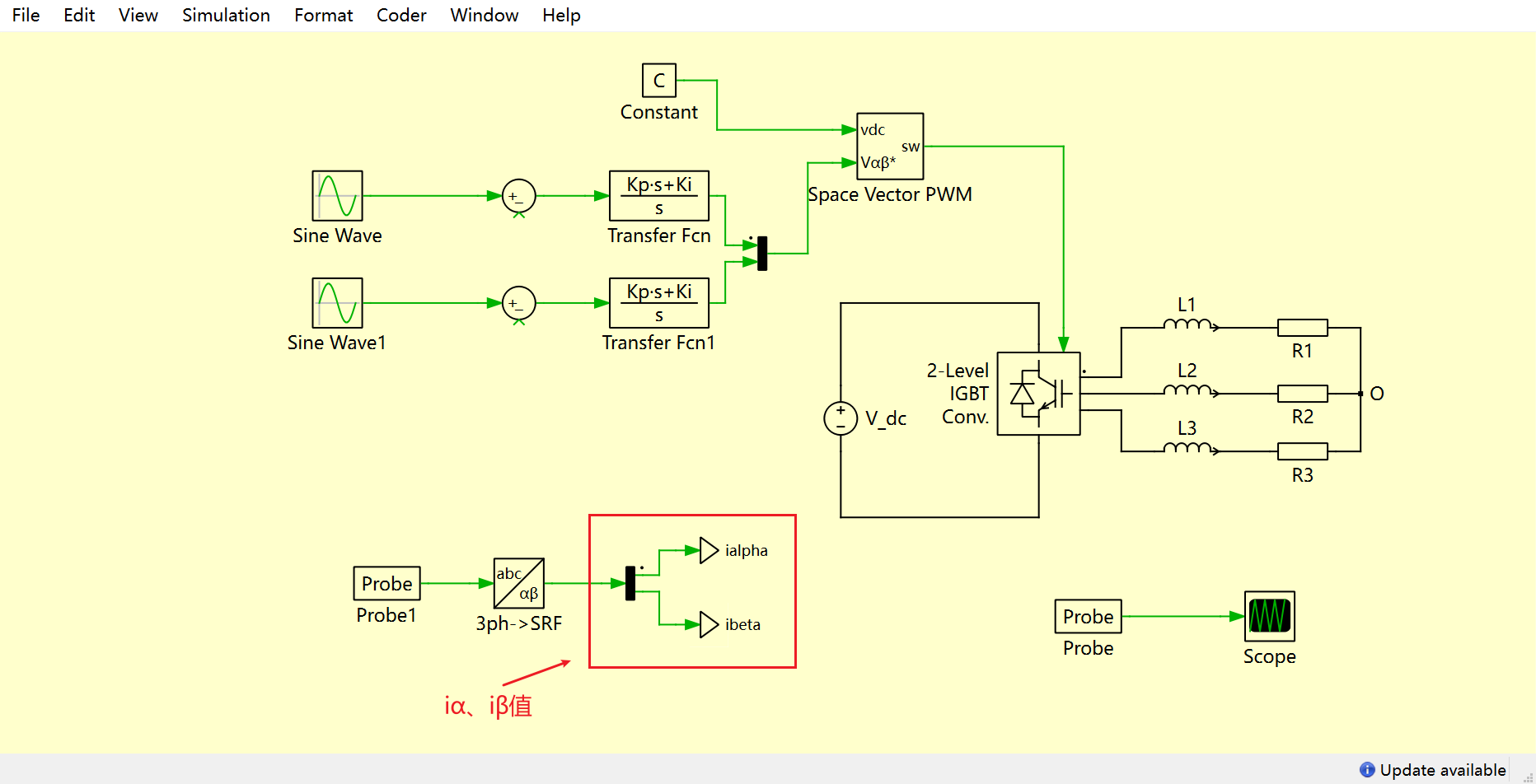
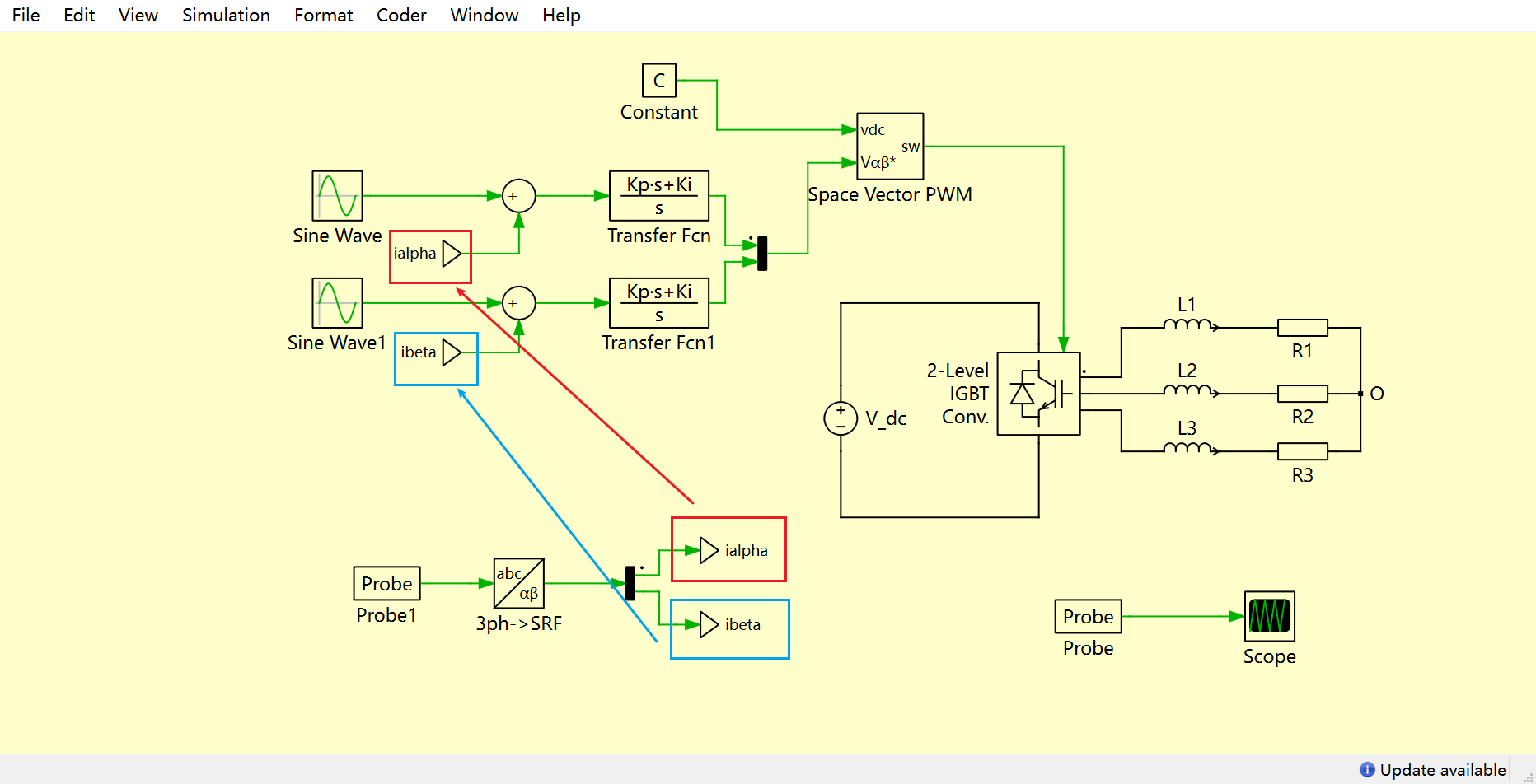
将iα、iβ送入PI控制器:
至此电路搭建完成,现在我们来看一下PI控制器中Kp、Ki怎么设计:
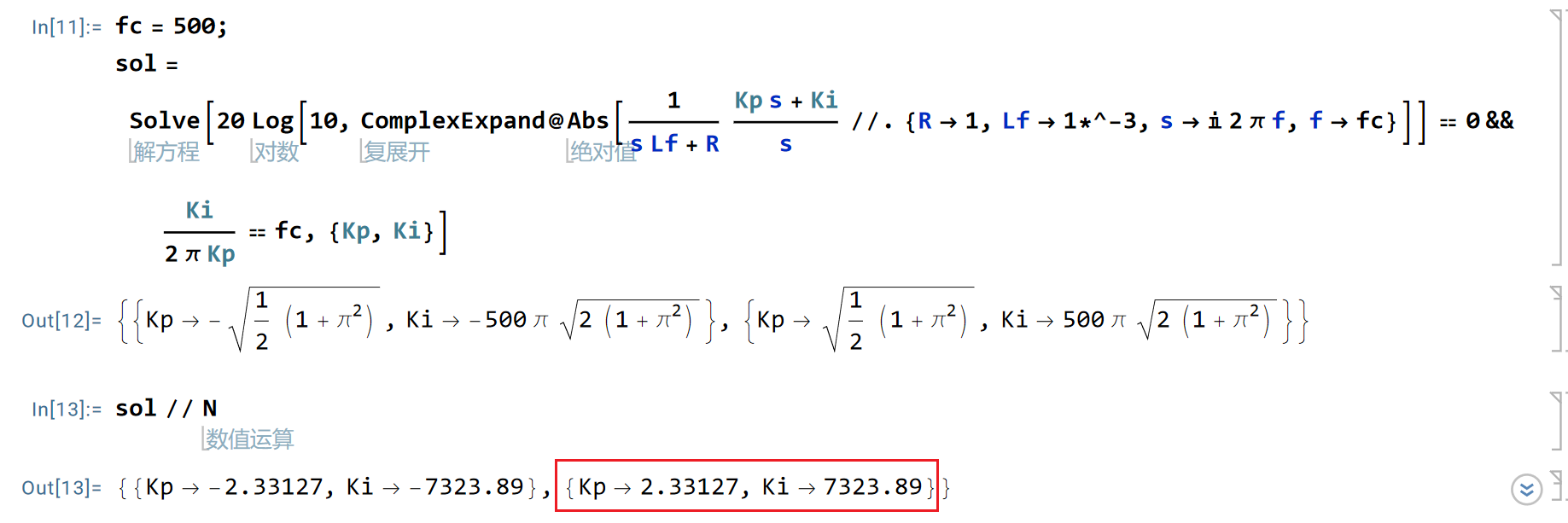
在mathematica中设计:
穿越频率fc设计为开关频率的1/10,所以为1kHz;
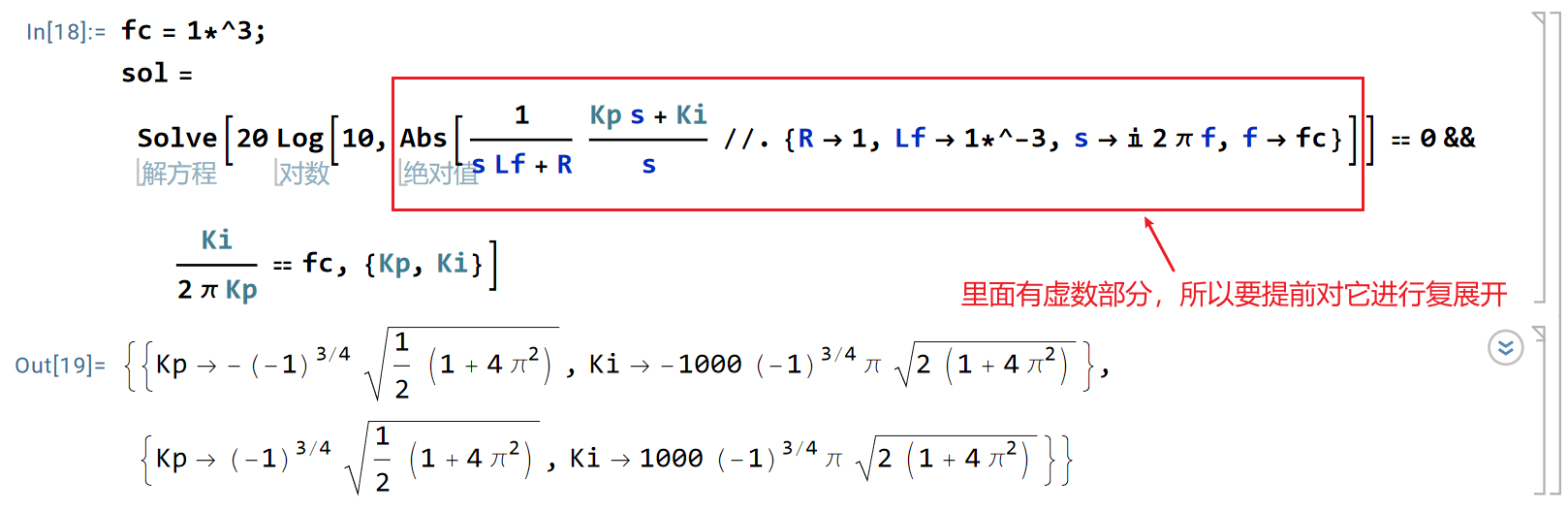
得到两组结果:
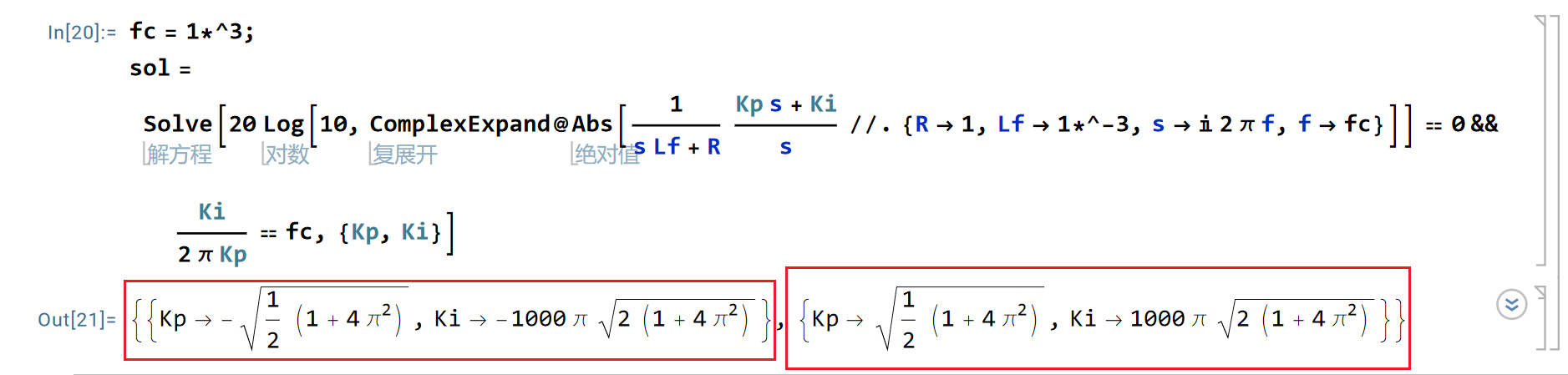
求数值解:
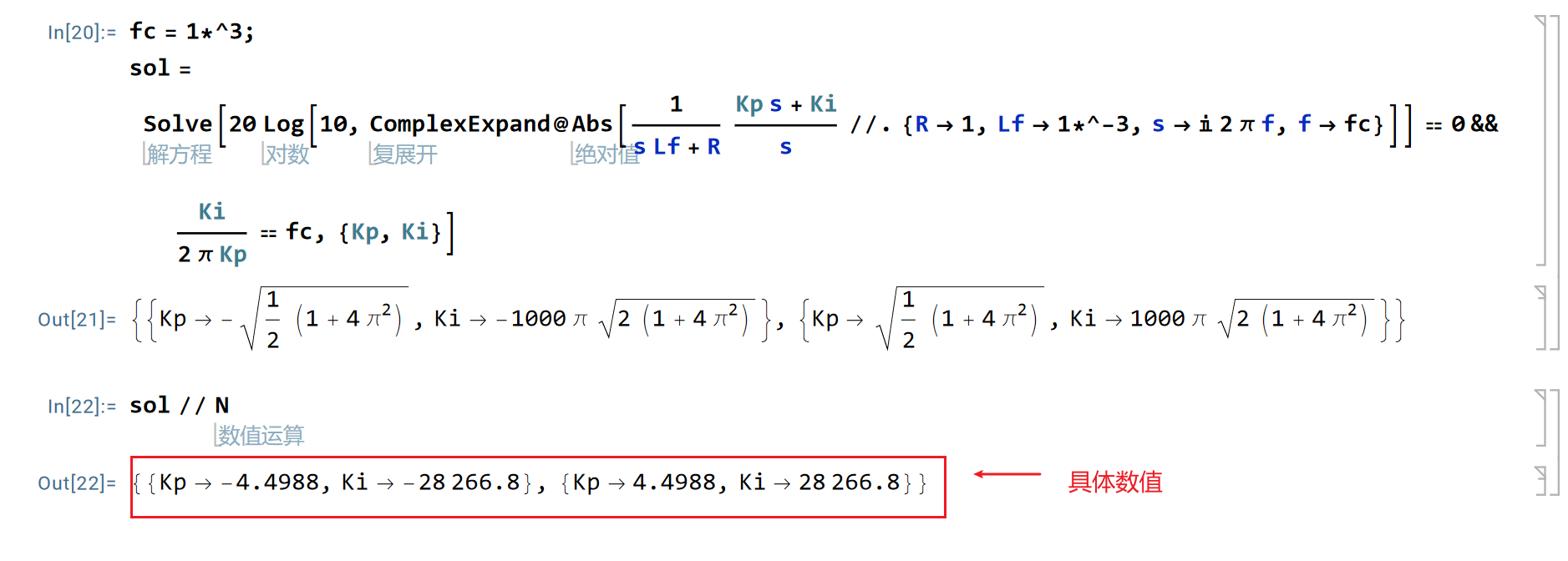
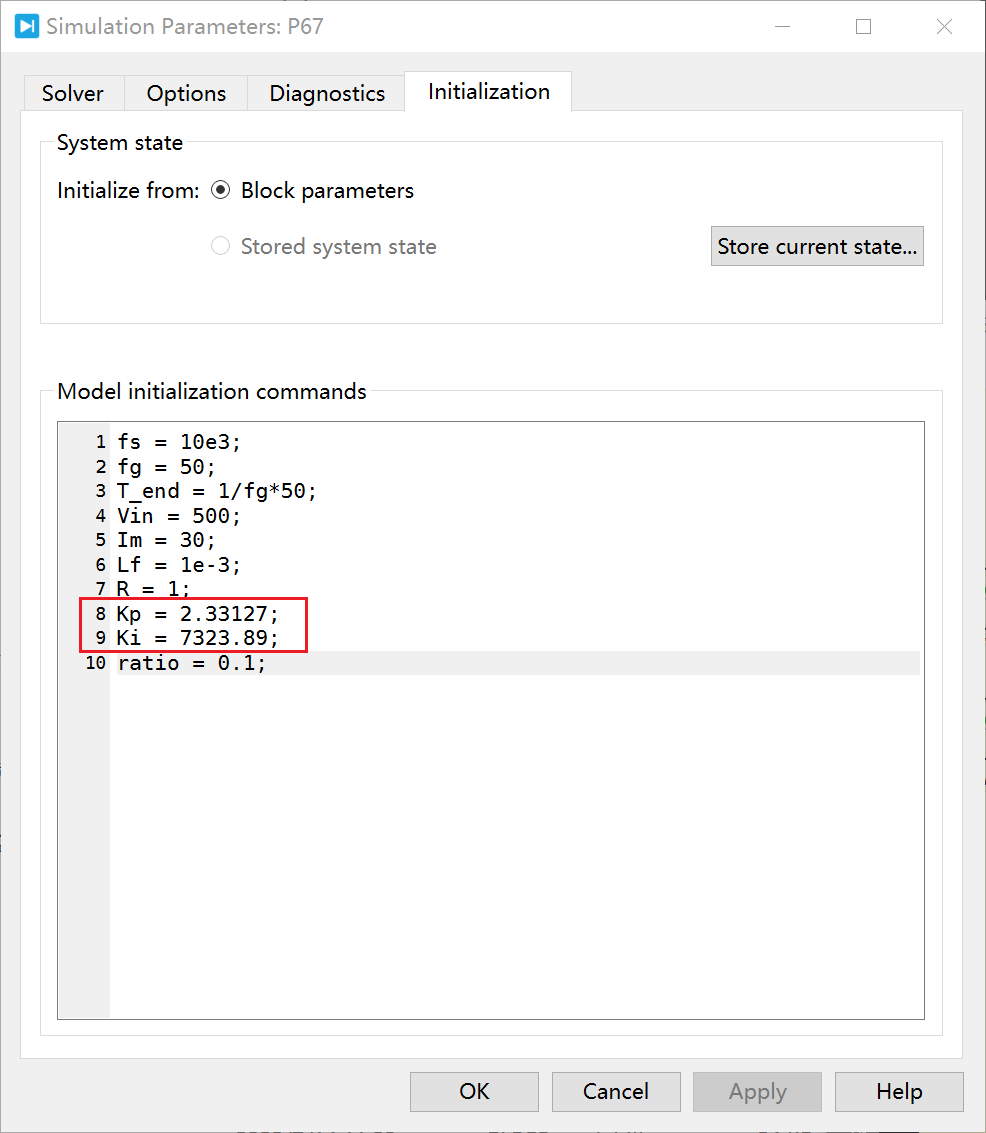
我们取正的Kp、Ki的值:

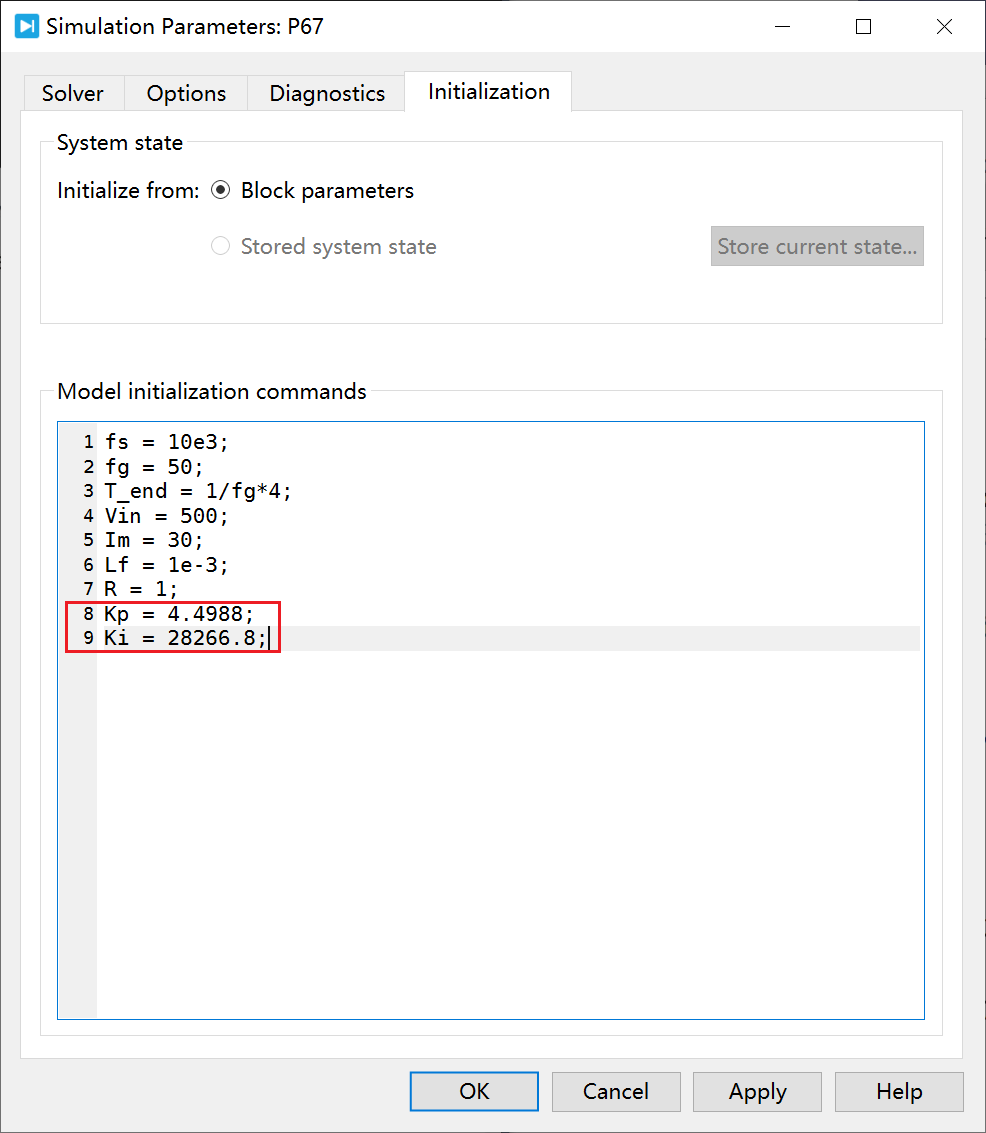
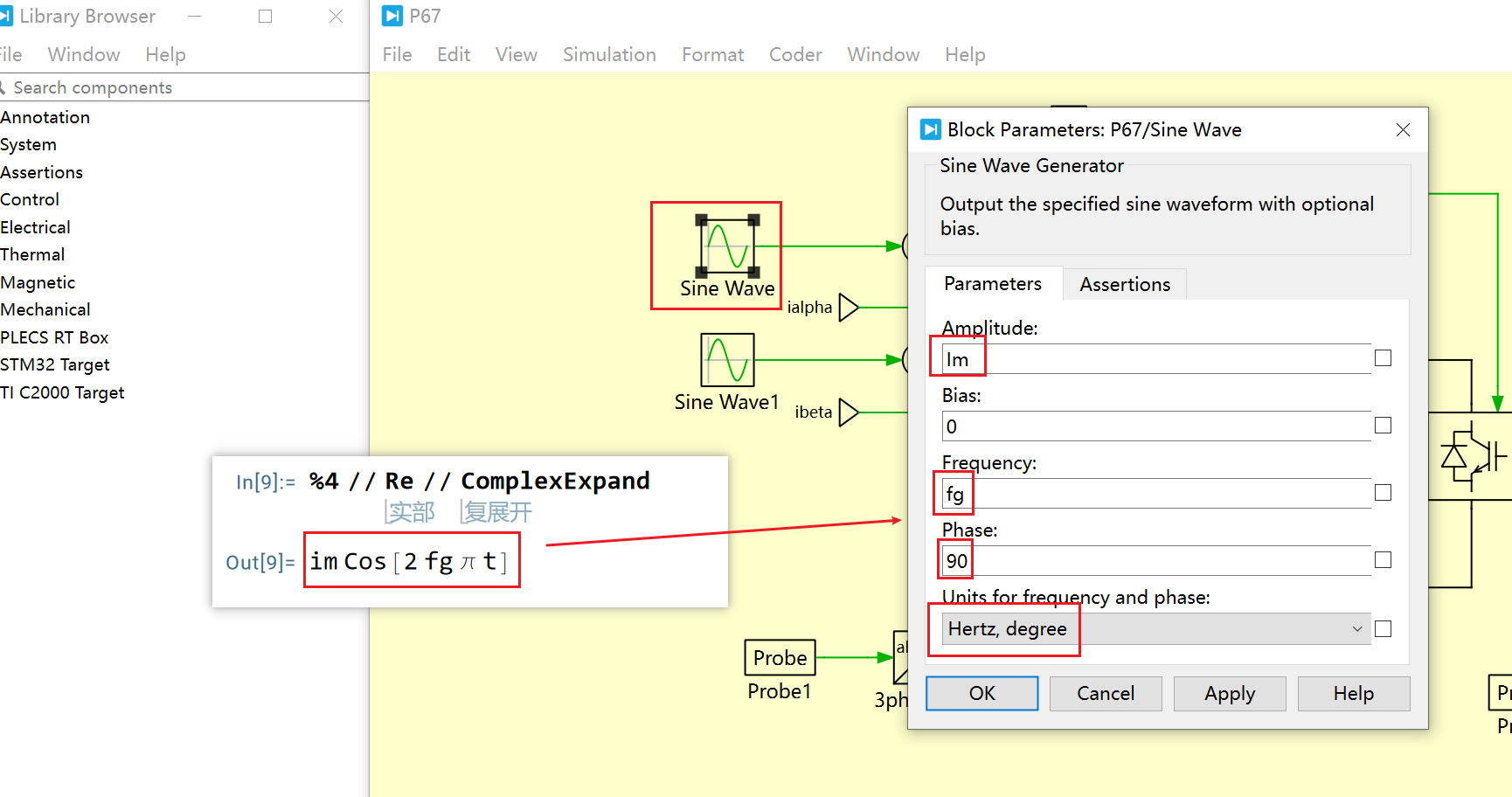
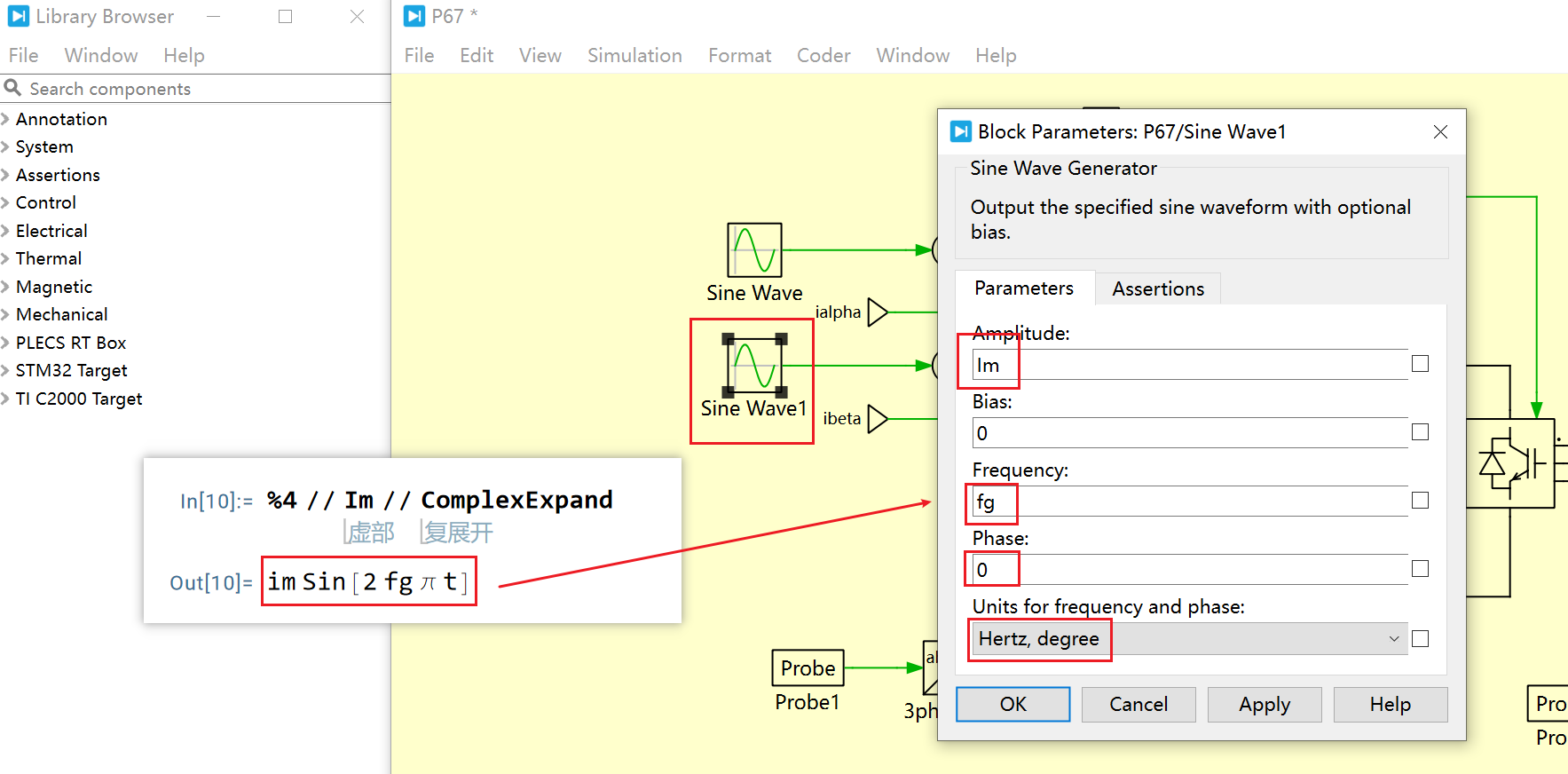
现在我们来设置iα*、iβ*,参考信号的参数:
我们假设需要的三相输出电流的形式为:
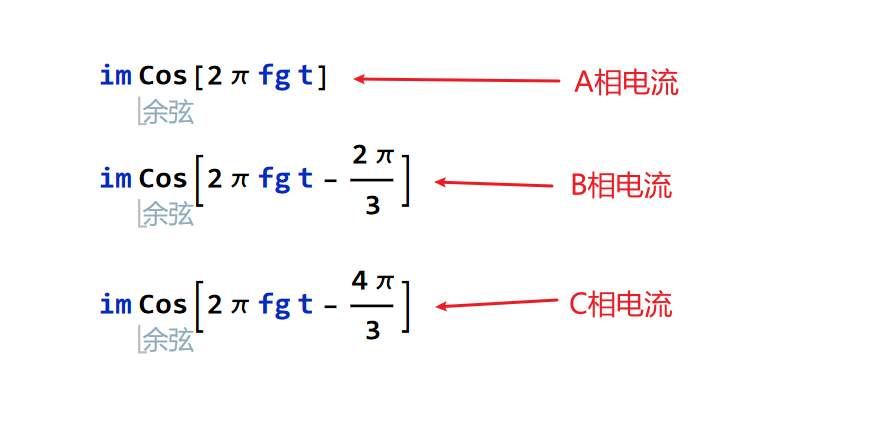
.
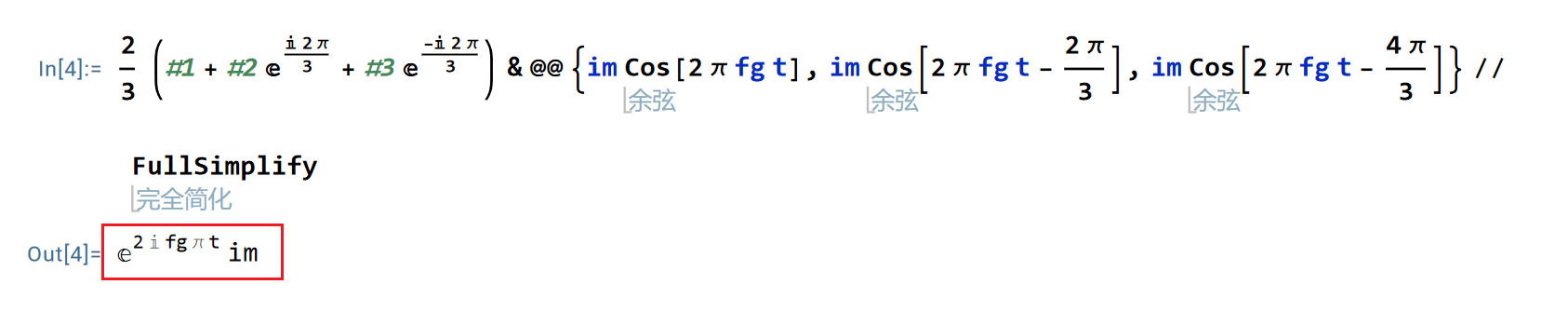
对上面的三相电流进行坐标变换:
然后分别取变换后的实部和虚部:
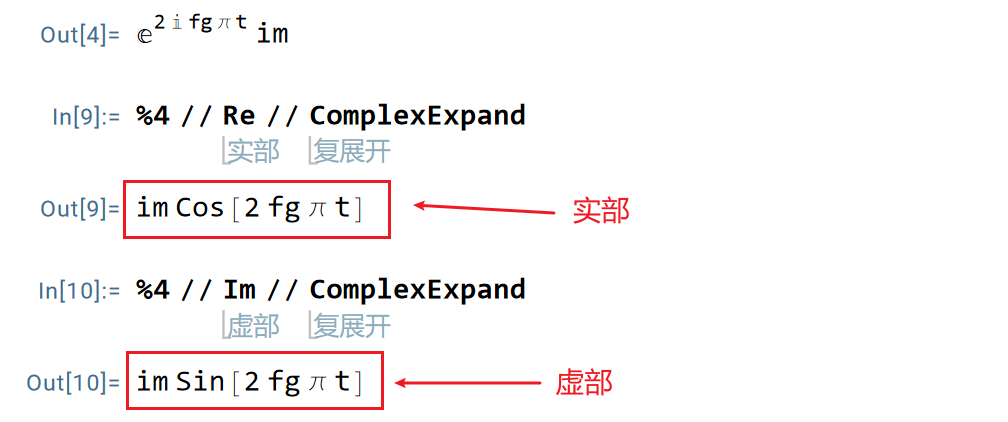
将上面得到的实部和虚部结果带入仿真电路中
完成以上后,开始仿真,结果如下:
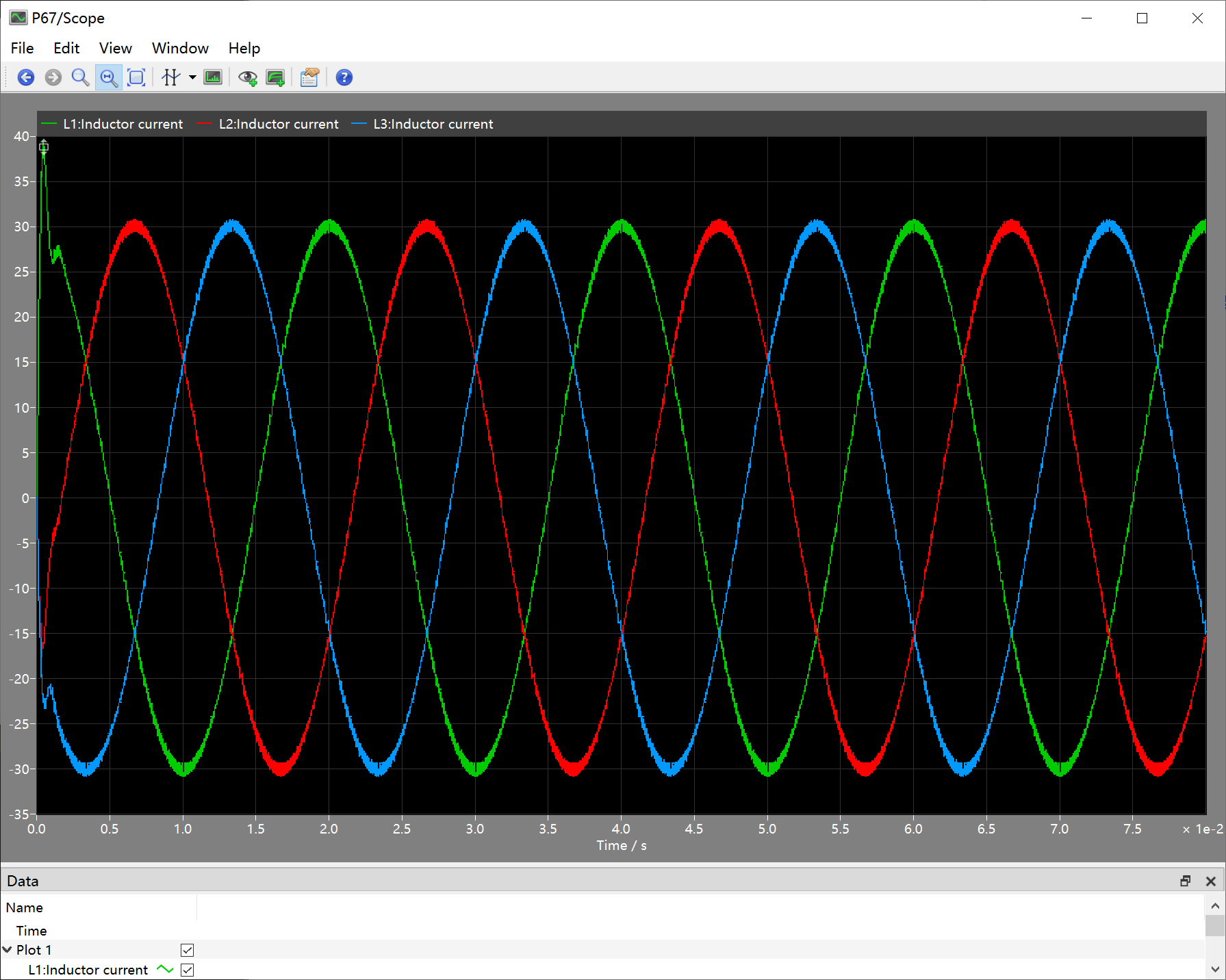
波形结果与设计相符。
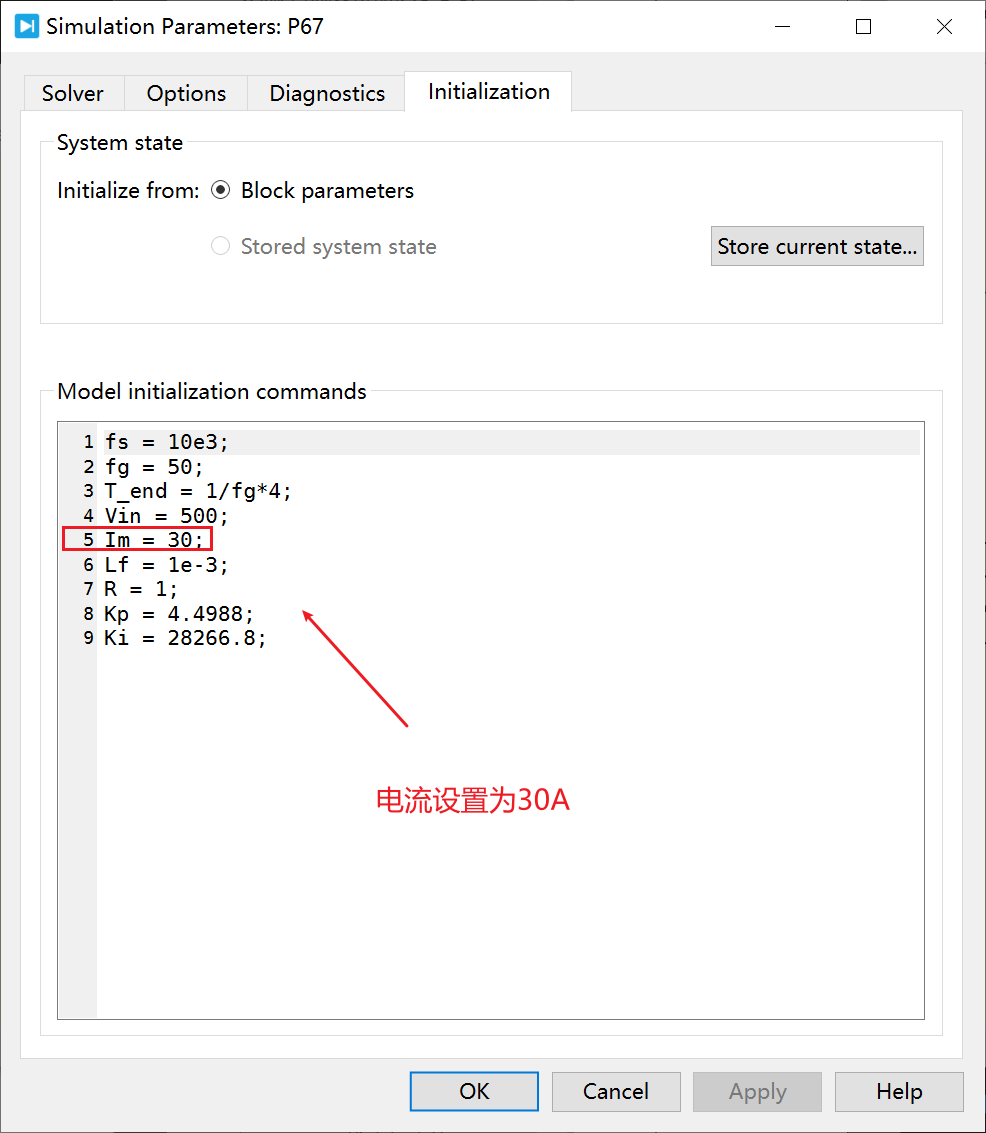
现在我们来看一下,当负载电阻发生突变的情况下,输出电流是否能稳定在30A:
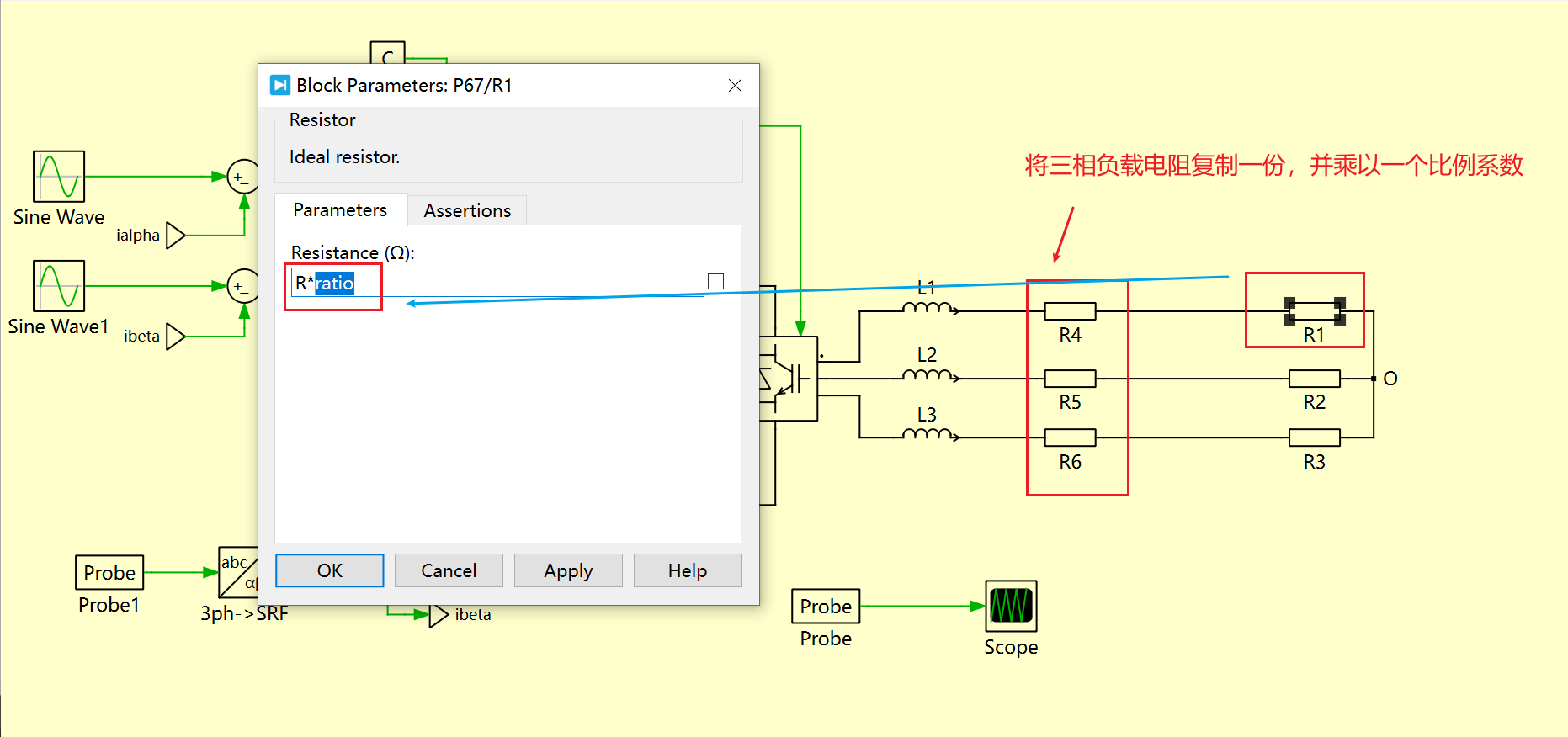
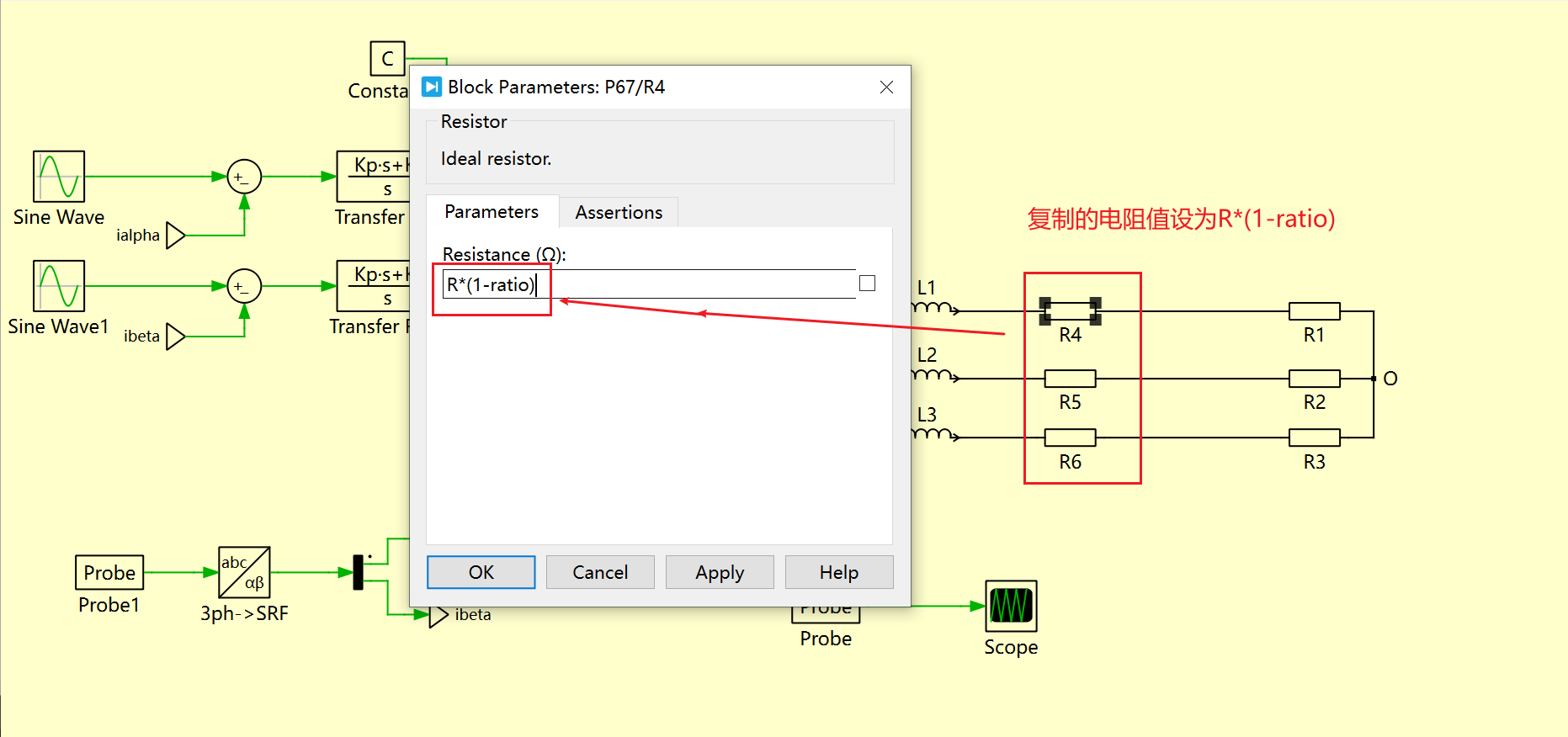
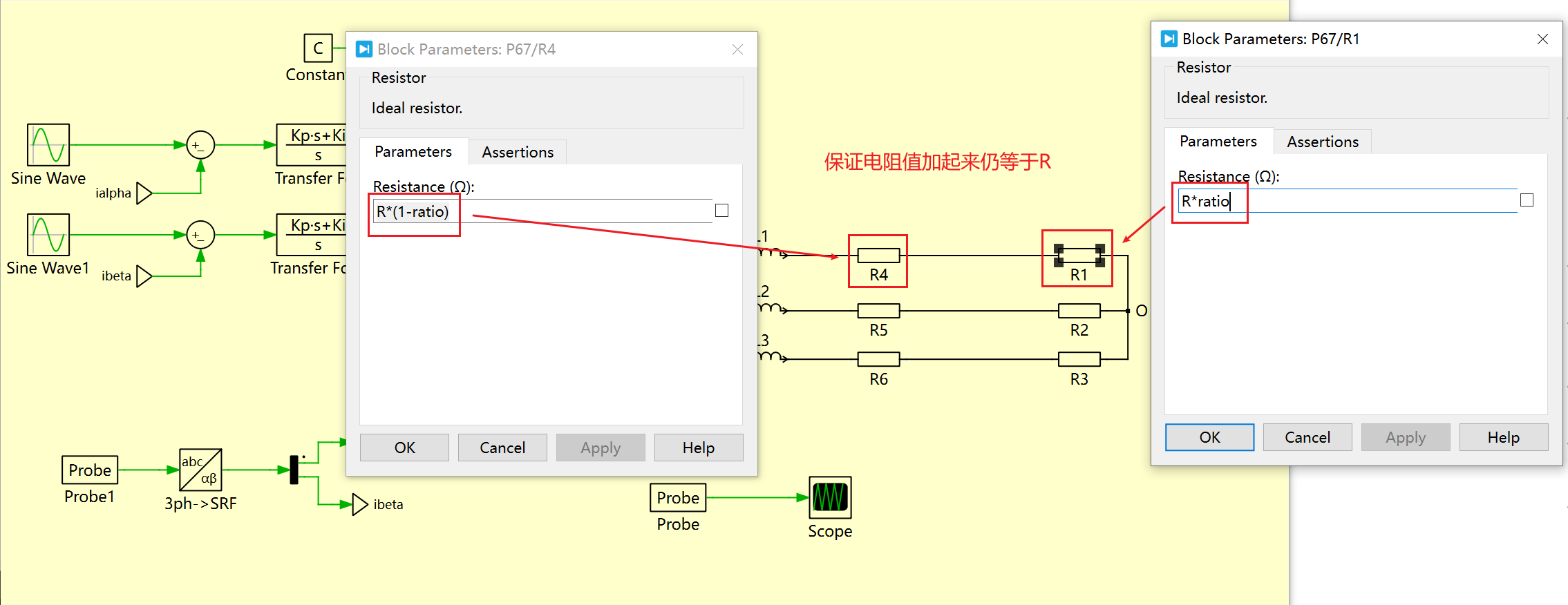
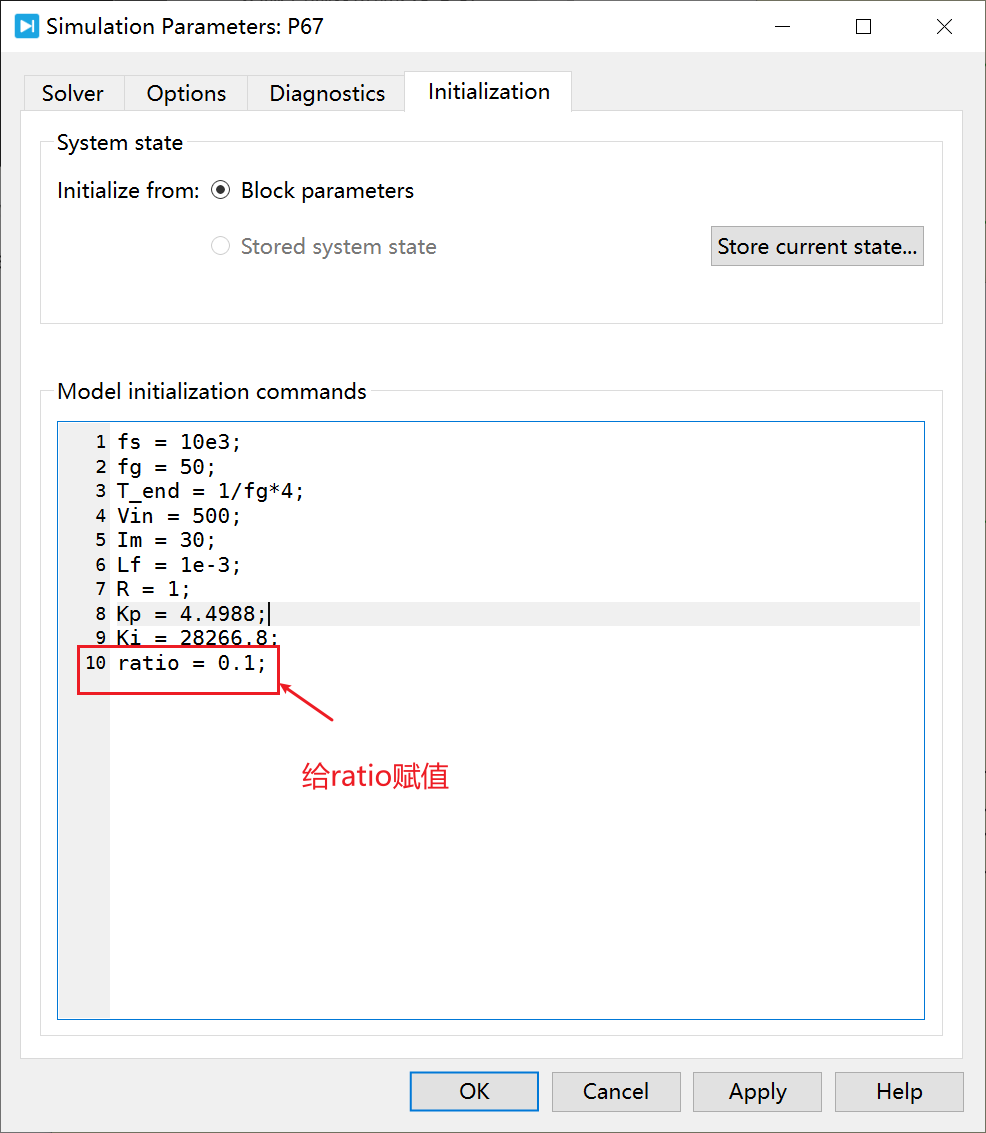
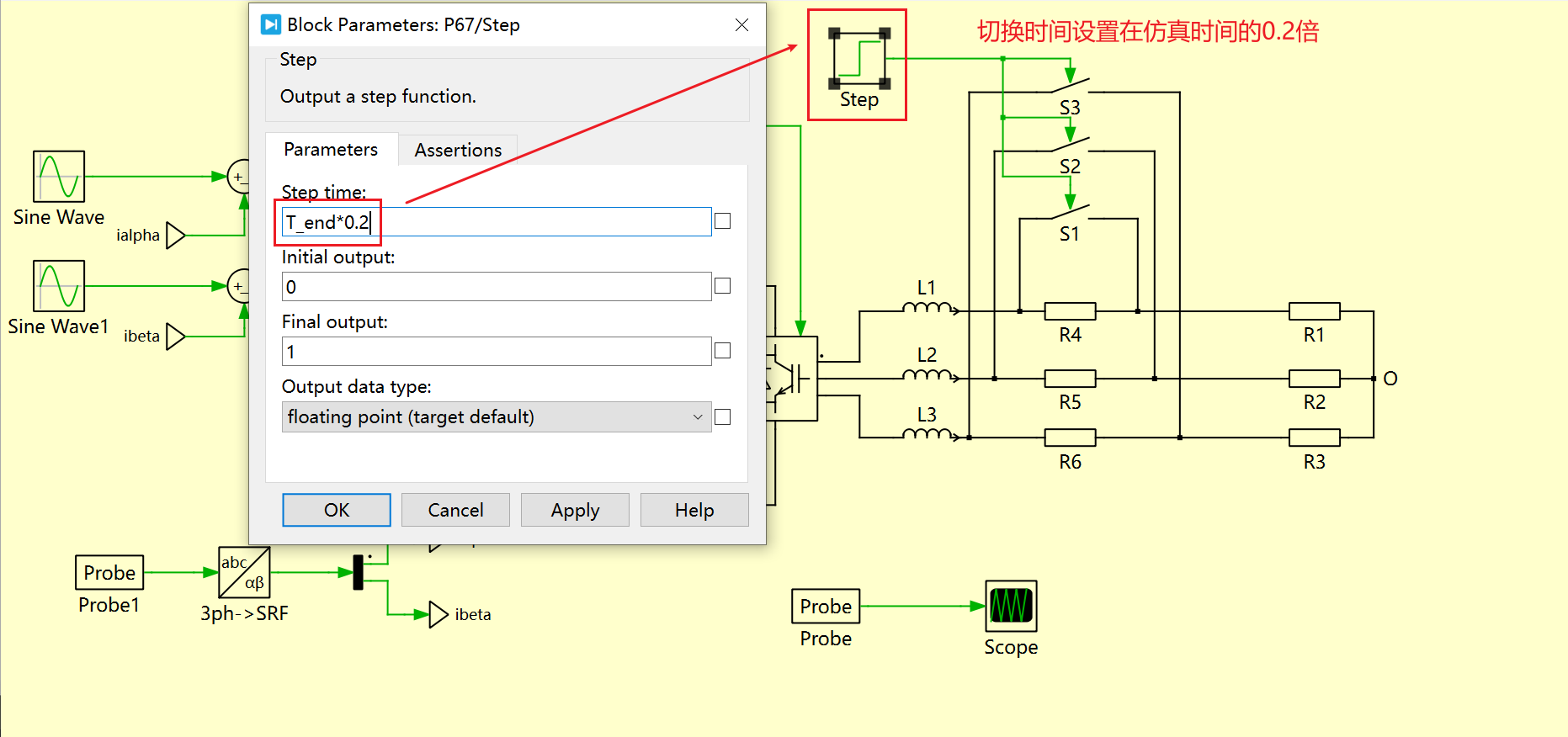
实现负载变化:
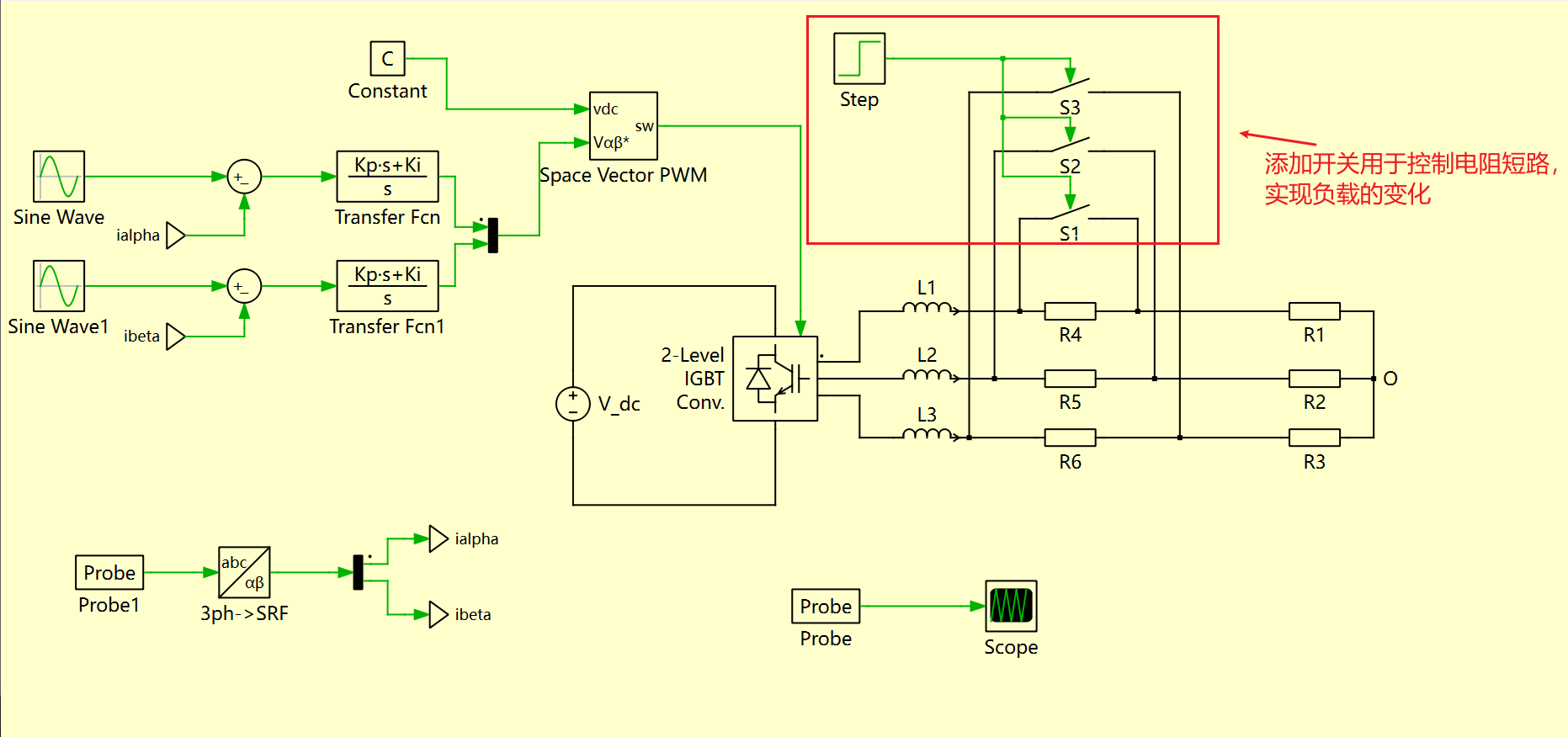
设置电阻发生跳变的时间:
开始仿真:
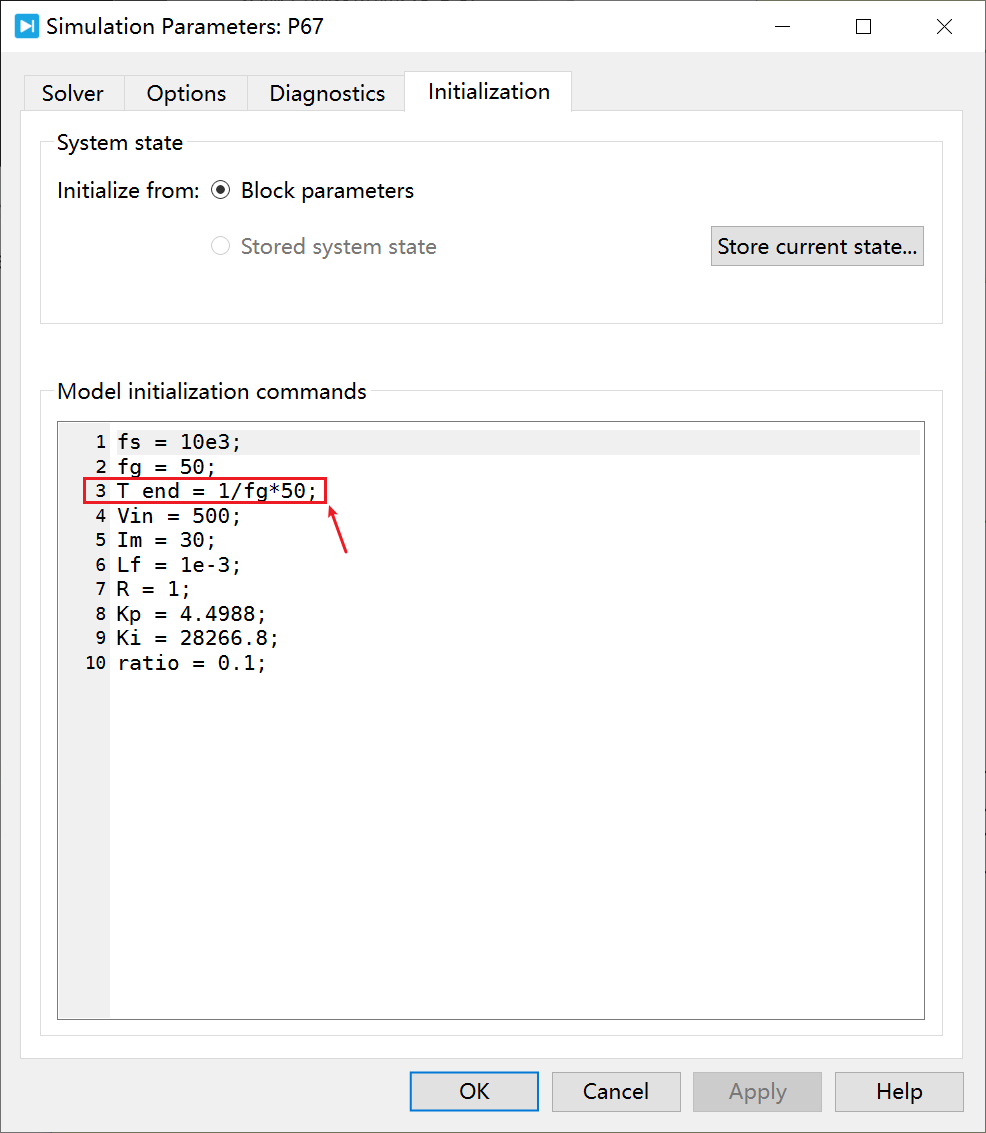
将仿真时间调大一点设置如下:
仿真结果如下:
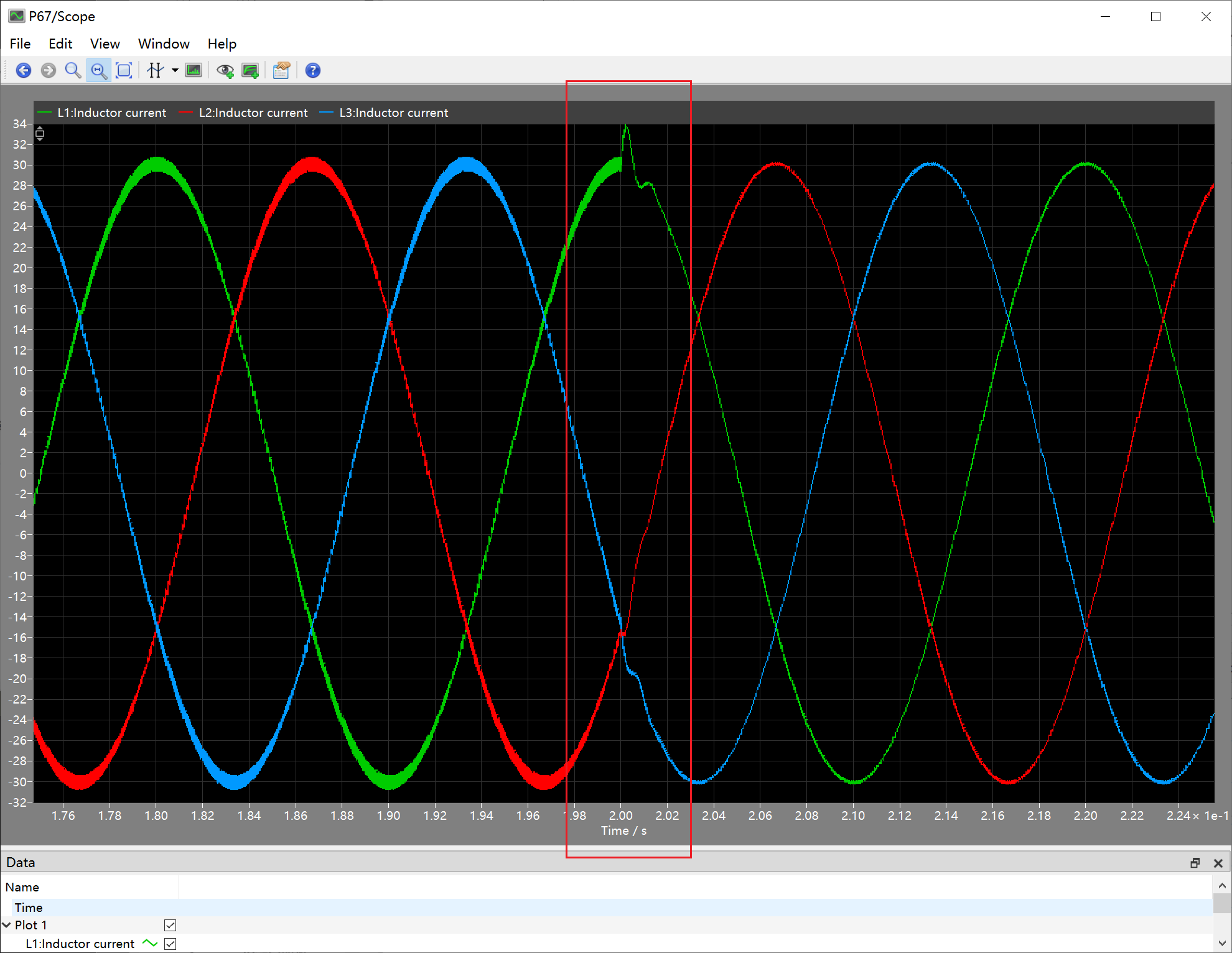
可以看到,负载变化前后,输出电流仍为30A,只是负载变化后输出电流的文波变小了,因为电阻减小,被控对象的的传递函数1/(s Lf+R)的值增大,输出滤波效果更好了。
然后我们对比一下记录65中的开环仿真模型:
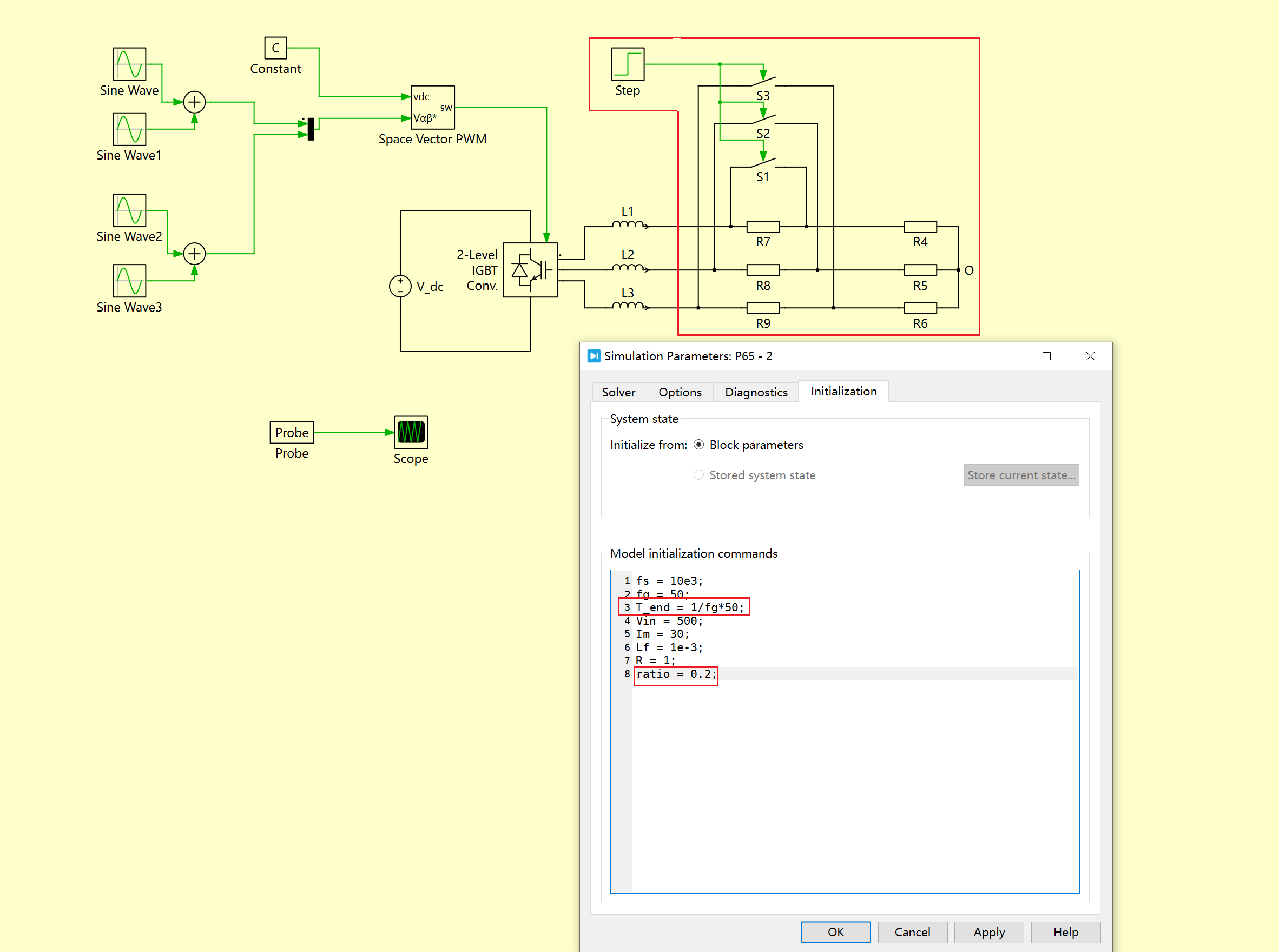
负载发生变化时,结果如下:
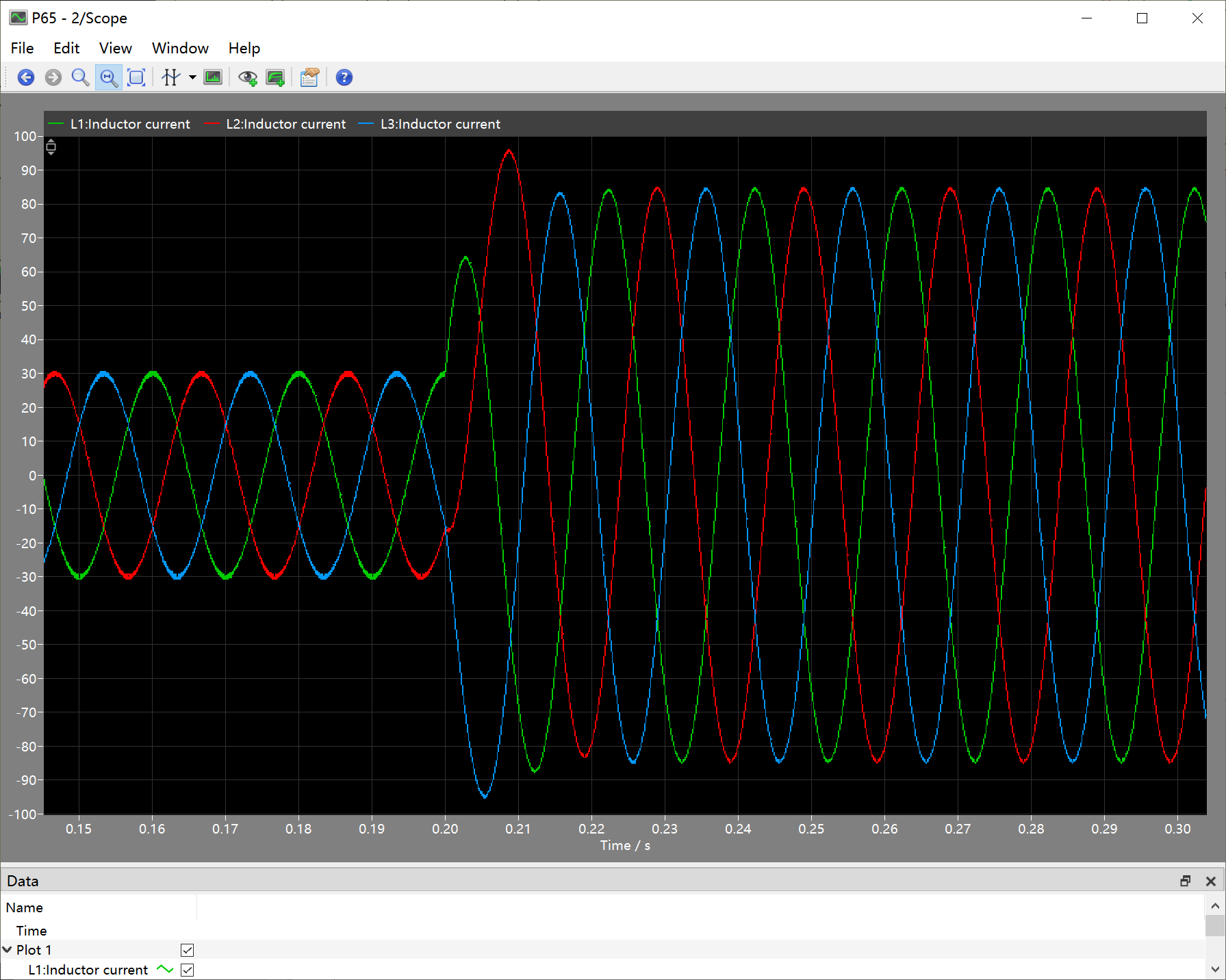
负载发生变化,输出电流也发生了变化。输出电流没法跟踪负载的变化。
现在我们来看一下当我们的穿越频率变化时,输出电流是否有变化:
当穿越频率为1kHz,对输出负载变化之前的波形进行傅里叶分解:
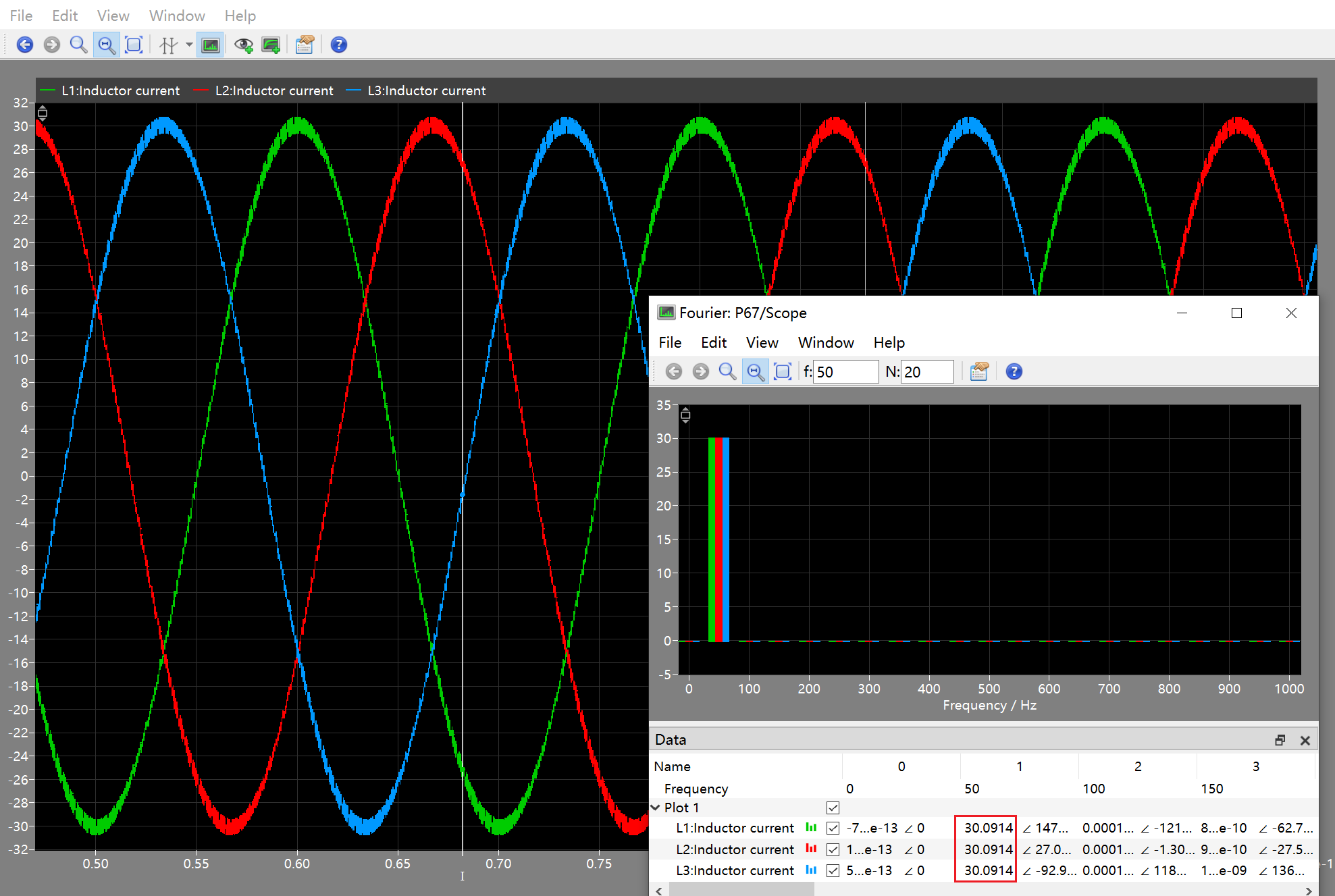
可以看到三相的输出电流基本维持在30.0914A
现在我们把穿越频率设置为500Hz,重新计算Kp、Ki,并带入电路:
重新进行仿真,并对波形进行傅里叶分解:
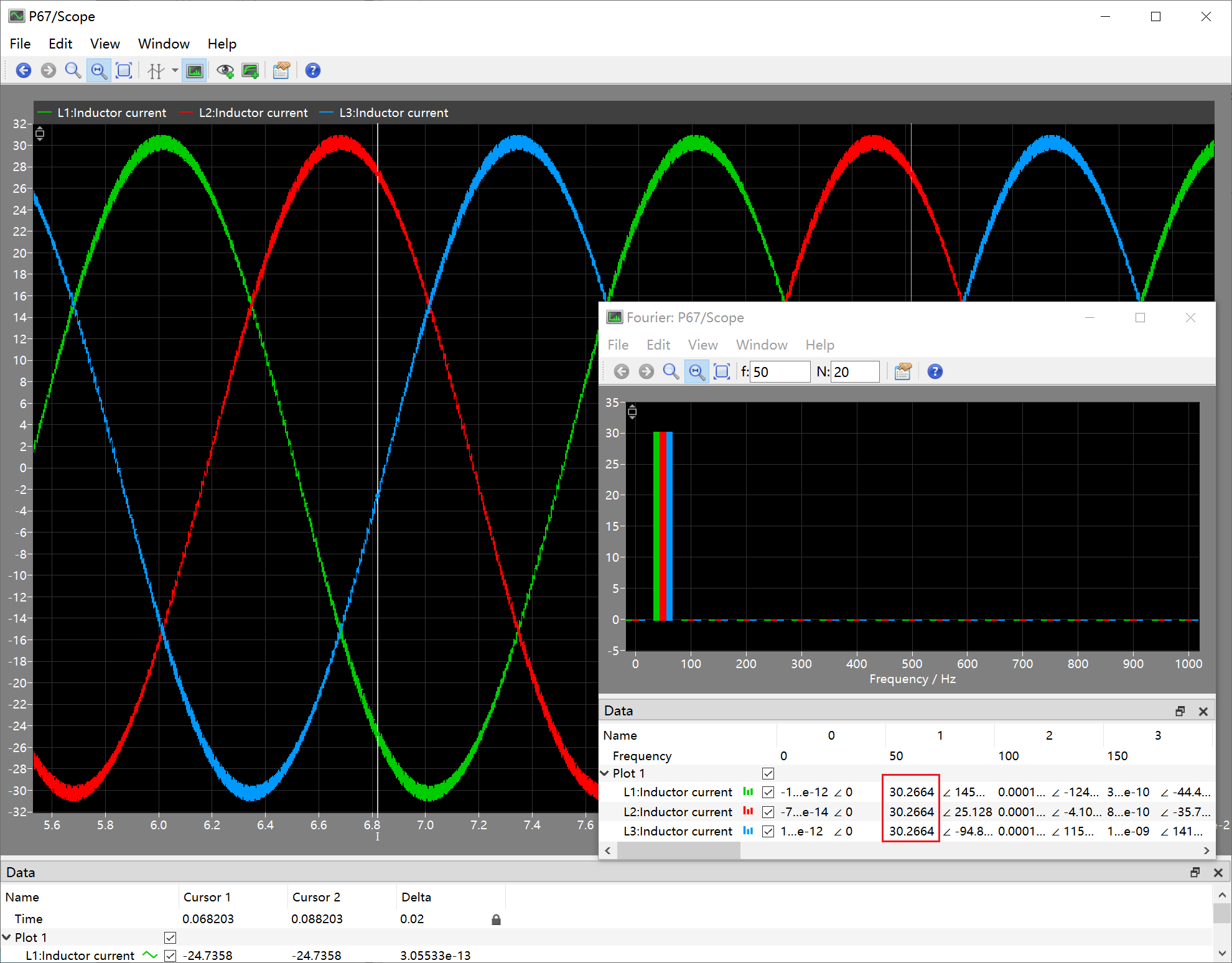
可以看到输出电流的幅值发生了变换,输出电流的幅值为30.2664A,稍有增加。
说明使用PI控制器,输入为直流的时候,可以实现无进差的跟踪,由于我们的三相电流的给定参考信号是正弦波iα*、iβ*,频率fg是50Hz,由于在fg的频率下,开环传递函数
的增益并不是无穷大,所以输出是有进差的。
如果给定的参考量iα*、iβ*是直流量的话,由于开环传递函数是1型系统,在频率等于0的时候的增益无穷大,所以就可以实现无进差的跟踪。
所以我们在控制系统设计的时候,要尽量让带宽设计的大一点,这样跟踪性能会好一点,当然也要考虑与开关频率的搭配。

立足具身智能前沿赛道,致力于搭建全球化、开源化、全栈式技术交流与实践共创平台。
更多推荐

 5
5 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)