【自动驾驶】Autoware.Universe 开发概述 ④ ( 高精地图构建 | 点云地图 Pointcloud Map | 矢量地图 Vector Map | 点云地图 与 矢量地图 关系 )
一、高精地图构建1、高精地图构成2、点云地图 Pointcloud Map3、矢量地图 Vector Map二、点云地图 与 矢量地图 关系1、点云地图作用2、矢量地图作用3、点云地图 与 矢量地图 二者关联
文章目录
Autoware.Universe 2025年11月27日 最新文档 下载地址 : https://download.csdn.net/download/han1202012/92412413
一、高精地图构建
1、高精地图构成
在 https://autowarefoundation.github.io/autoware-documentation/main/tutorials/integrating-autoware/creating-maps/ 文档中 , 介绍了 如何 创建 高精地图 ;
Autoware 需要一个 点云地图 和 矢量地图 , 表示车辆的 行车环境 , 这两种地图 共同组成了 Autoware 自动驾驶 的 高精地图 ;
- 点云地图 ( Pointcloud Map ) : 是 自动驾驶 核心 地图类型 , 由 激光雷达 采集数据生成 ;
- 矢量地图 ( Vector Map ) : 包含 车道、交通规则 等语义信息的结构化地图 ;
2、点云地图 Pointcloud Map
传统的 点云地图 通过 移动测量系统 MMS ( Mobile Mapping System ) 进行创建 , MMS 需依赖 高端传感器 实现 精确定位 , 地图成本极高 , 不适用于小型团队开发 ;
作为替代方案 , 可通过 同步定位与地图构建 SLAM ( Simultaneous Localization And Mapping ) 算法 , 基于 录制 的 激光雷达 扫描数据 生成 点云地图 , 该方式生成 地图成本很低 , 使用 普通的 激光雷达 即可实现 点云地图 构建 ;
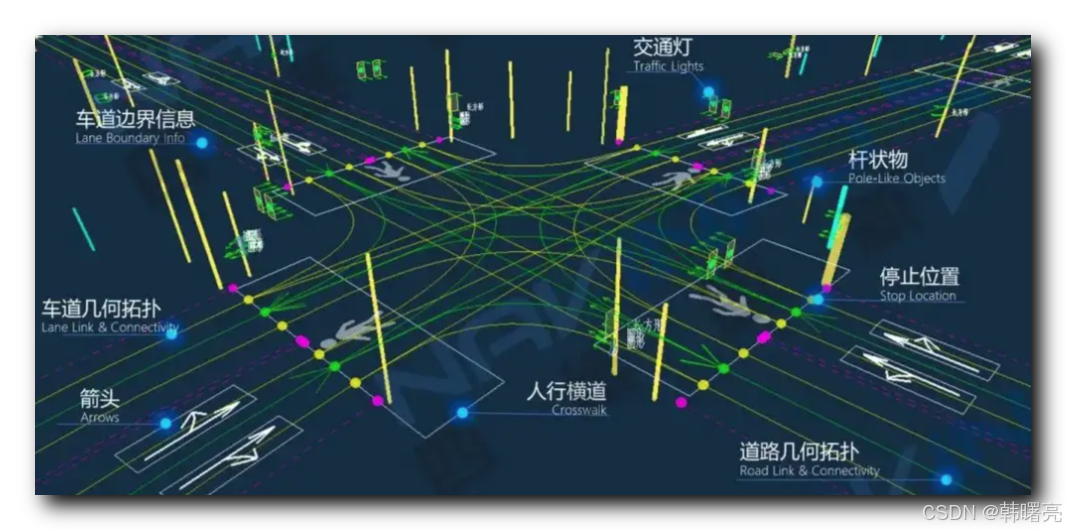
3、矢量地图 Vector Map
Autoware 提供了 bag2lanelet 工具 , 这是一款 基于 自身定位数据 创建 虚拟车道 的工具 ;
其生成地图的原理是 通过该 bag2lanelet 工具从 包含自身定位信息的 rosbag 文件中 , 提取 定位数据 并 生成简单的 lanelet 车道单元 , 快速测试 Autoware 的运行性能 ;
bag2lanelet 工具的核心应用场景 是 在已 手动行驶过的路线 上 模拟自动驾驶 ;
bag2lanelet 工具 仅能生成 单车道地图 , 如果需要 实现更全面的地图构建和导航功能 , 建议使用 矢量地图构建器 ( Vector Map Builder ) ;
矢量地图构建器 ( Vector Map Builder ) 是 TIER IV 公司提供的免费网页版工具 , 该工具支持以点云地图为参考 , 绘制车道并添加 停车标志、交通信号灯等监管要素 ;
二、点云地图 与 矢量地图 关系
1、点云地图作用
点云地图 ( Point Cloud Map / HD Point Cloud Map ) :
- 数据形式 : 由 大量 3D 点 组成 ( 通常是 .pcd 格式 ) , 来源于高精度激光雷达采集并经过配准、滤波处理 ;
- 主要用途 :
- 定位 ( Localization ) : 通过 将 实时激光雷达点云 与 地图点云 进行匹配 ( 如使用 NDT 或 ICP 算法 ) , 实现 车辆的 高精度定位 ;
- 环境感知辅助 : 可用于 静态障碍物检测、可行驶区域判断 等 ( 但通常不用于动态障碍物 ) ;
- 特点 : 高精度、高密度、体积大、不包含语义信息 ( 如车道线、交通标志等 ) ;
如果只有 点云地图 , 没有 矢量地图 : 车辆知道我在哪 , 但是不知道 怎么走 , 要遵守什么规则 ;
- 通过 LiDAR 与点云匹配 , 能实现 定位功能 ;
- 因为缺少道路网络信息 , 无法进行路线规划 ;
- 交通灯、停止线 等 信息仅存在于矢量地图 , 无法识别这些信息 ;
如果你的目标仅仅是让车辆 在已知环境中 实现高精度的定位 和 基本的循迹行驶 , 那么只使用点云地图是可行的 ;
在实车测试中 , 可以配置 决策模块 不依赖 矢量地图 , 车辆能够通过 定位 和 跟踪 预先录制好的航点 来移动 , 这种 循迹运动 功能有限 , 缺乏对交通规则等复杂场景的应对能力 ;
2、矢量地图作用
矢量地图 ( Vector Map ) :
-
数据形式 : 结构化数据 , 描述道路几何和语义信息 ( 如车道中心线、车道边界、交叉口、信号灯位置、限速等 ) , 常见格式包括 OpenDRIVE (.xodr)、Lanelet2 (.osm) 等 ;
-
主要用途 :
- 路径规划 ( Route & Behavior Planning ) : 提供拓扑结构 , 用于全局路径生成 ;
- 行为决策 ( Behavior Decision ) : 依据车道规则、交通标志等做决策 ;
- 局部轨迹规划 ( Local Trajectory Planning ) : 基于车道中心线生成平滑轨迹 ;
-
特点 : 轻量、含语义、支持复杂交通规则建模 ;
如果只有 矢量地图 , 没有 点云地图 : 车辆知道 怎么走 , 要遵守哪些规则 , 通过视觉定位 知道我在哪 ;
- 无需 LiDAR 和 点云 , 只通过 视觉定位 实现 定位 ;
- 矢量地图 中 拥有全部道路网络信息 , 能进行 路线规划 ;
- 矢量地图 中 存在 道路设置 标注 , 能识别交通灯、停止线等交通元素 ;
如果 不依赖基于 激光雷达 的定位 , 而采用其他定位系统 ( 如 : 纯 GNSS/IMU , 但 精度 和 可靠性 通常较低 ) , 那么可以 只使用矢量地图进行路径规划 ;
在标准的 Autoware 栈中 , 高精度的 LiDAR 定位 需要点云地图 , 没有点云地图 , lidar_localizer节点就无法工作 , 进而影响整个系统的定位精度和可靠性 ;
3、点云地图 与 矢量地图 二者关联
矢量地图 几乎绝对必须 , 因为它承载了自动驾驶最核心的规划和决策所需信息 ;
点云地图 相对次要 , 在有替代定位方案时可以不使用 ;
在 Autoware 中 ,
- 矢量地图 是自动驾驶的 " 灵魂 " , 几乎绝对必须;
- 点云地图 是 " 眼睛 " , 在标准 LiDAR 配置下必须 , 但在特定条件下可被替代 ;
若只能选其一 , 必须选择 矢量地图 , 否则车辆将无法完成最基本的路线规划和交通规则遵守 ;

立足具身智能前沿赛道,致力于搭建全球化、开源化、全栈式技术交流与实践共创平台。
更多推荐

 9
9 0
0- 0



 已为社区贡献8条内容
已为社区贡献8条内容

所有评论(0)