目标检测三大经典算法深度对比:Faster R-CNN、TOOD 与 YOLOv8
Faster R-CNN
论文
代码
TOOD
论文
代码
官方 PyTorch 实现:fcjian/TOOD
MMDetection 集成版本:open-mmlab/mmdetection/configs/tood
YOLOv8
论文
YOLOv8 官方技术文档:Ultralytics YOLOv8 Docs
代码
官方 Ultralytics 仓库:ultralytics/ultralytics
一、前言:目标检测的两大流派与算法选型痛点
目标检测是计算机视觉领域的核心基础任务,核心是同时完成图像中目标的分类识别与空间定位,是自动驾驶、工业质检、安防监控、遥感影像分析等场景的核心技术。
经过多年发展,目标检测算法形成了两大核心流派:
-
两阶段(Two-Stage)算法:遵循「先生成区域提案,再对提案分类精修」的流程,优势是检测精度、定位精度和召回率高,短板是推理速度慢,难以满足实时场景需求。
-
一阶段(One-Stage)算法:采用「端到端直接预测」的思路,在单次网络前向传播中同时完成目标的分类和定位,优势是速度快、部署简洁,是实时检测场景的主流方案。
本文选取的三个算法,正是两大流派中极具代表性的里程碑式作品:
-
Faster R-CNN:两阶段检测的集大成者,彻底解决了传统区域提案的计算瓶颈,奠定了现代深度学习检测算法的基础;
-
TOOD:一阶段检测的精度革新者,直击一阶段算法「分类与定位任务错位」的核心痛点,大幅刷新了一阶段检测的精度上限;
-
YOLOv8:工业实时检测的标杆,YOLO 系列的集大成之作,在速度、精度、工程化和易用性上做到了极致平衡,是目前工业界落地最广泛的检测算法。
二、三大算法核心原理与创新点拆解
2.1 Faster R-CNN:两阶段目标检测的里程碑
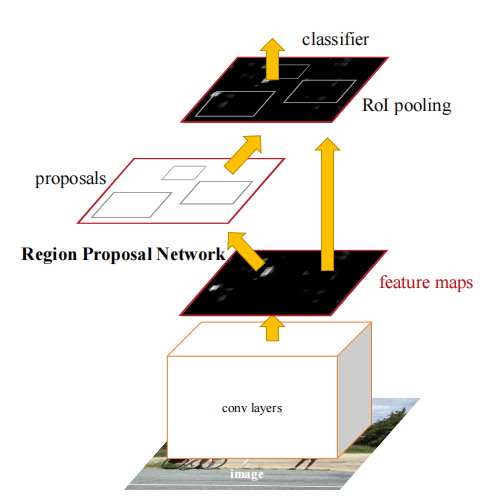
Faster R-CNN 由何凯明团队在 2015 年提出,是 R-CNN 系列的最终演进版本。在此之前,R-CNN、Fast R-CNN 均依赖 Selective Search 等 CPU 端的区域提案方法,区域提案步骤成为检测流程的核心性能瓶颈;而 Faster R-CNN 首次实现了全网络的卷积特征共享,让区域提案的计算成本从秒级降至 10ms 级别,真正实现了两阶段检测的端到端训练与推理。
2.1.1 核心架构与创新点
1、共享卷积的双模块统一架构
Faster R-CNN 由RPN(区域提案网络)和Fast R-CNN 检测头两大核心模块组成,两个模块完全共享主干网络的全图卷积特征,摒弃了手工设计的区域提案方法。
-
RPN 模块:一个全卷积网络,在共享特征图上通过 3×3 滑动窗口遍历,结合 Anchor 机制生成候选区域,同时完成两个预测:每个锚框的「目标 / 背景二分类得分」、「边框回归偏移量」,输出高质量的目标候选框。
-
Fast R-CNN 检测头:接收 RPN 生成的候选区域,通过 RoI Pooling 将不同尺寸的提案特征映射为固定维度的特征向量,最终完成目标的细分类别预测和边框二次精修。
2、多尺度 Anchor 锚框机制
Faster R-CNN 首次系统性提出了锚框(Anchor)设计,通过预定义3 种尺度 + 3 种宽高比的基准框,在每个滑动窗口位置生成 9 个锚框。该设计无需构建多尺度图像金字塔或多尺寸滤波器金字塔,就能高效处理不同尺度、不同宽高比的目标,同时保证了模型的平移不变性,成为后续数年检测算法的基础设计。
3、四步交替训练策略
设计了交替优化的训练范式,实现了 RPN 和检测头的卷积层共享与协同优化:先训练 RPN,再用 RPN 的提案训练检测头;接着用检测头的权重初始化 RPN,固定共享卷积层微调 RPN;最后固定共享卷积层,微调检测头的专属层。通过该流程,两个模块的特征提取能力互相促进,最终形成一个统一的端到端检测网络。
2.1.2 性能表现
-
在 PASCAL VOC 2007 数据集上,基于 VGG-16 主干的 Faster R-CNN 达到 69.9% 的 mAP;
-
在 MS COCO 数据集上,基于 ResNet-101 主干实现了 42.7% 的 mAP@0.5;
-
速度方面,VGG-16 版本在 GPU 上全流程帧率为 5fps,轻量化 ZFNet 版本可达 17fps。
2.2 TOOD:一阶段检测的任务对齐革新者
TOOD(Task-aligned One-stage Object Detection)是 2021 年 ICCV 顶会提出的一阶段检测算法,直击传统一阶段检测的核心痛点:分类与定位两个子任务的预测错位。
传统一阶段检测器普遍采用「分类分支 + 定位分支」的并行双分支设计,两个任务独立学习、独立预测,导致两个核心问题:
-
空间错位:分类得分最高的锚点,和定位最精准的锚点,往往不是同一个空间位置;
-
预测错位:分类置信度高的预测框,定位精度可能很差;而定位精准的框,分类得分却很低,最终在 NMS 阶段被错误抑制,导致检测精度下降。
TOOD 从网络结构设计和训练学习策略两个层面,系统性解决了任务错位问题,大幅刷新了当时一阶段检测的精度上限。
2.2.1 核心架构与创新点
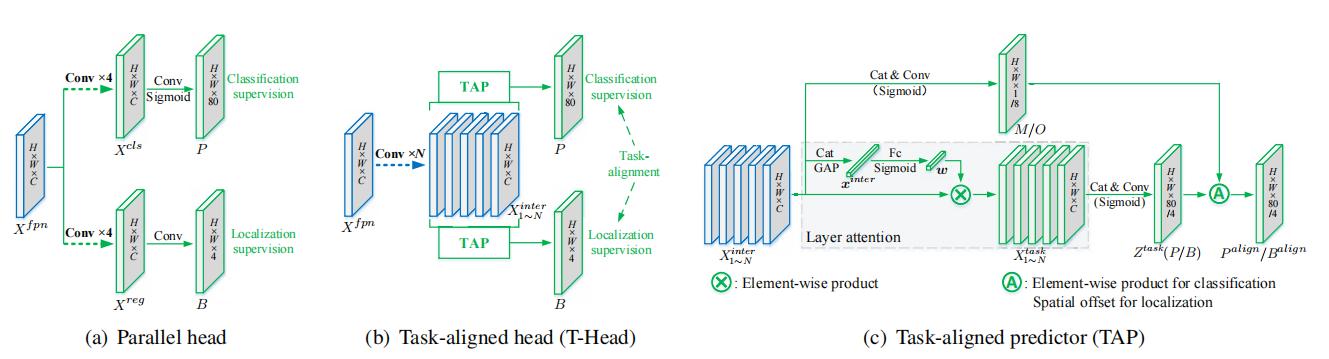
1、任务对齐头(T-Head)
摒弃了传统的并行双分支设计,重构了检测头的结构,先学习任务交互特征,再做任务专属的预测与对齐,核心分为两部分:
-
任务交互特征提取:通过堆叠的卷积层学习统一的任务交互特征,让分类和定位两个任务能充分感知彼此的信息,解决特征学习阶段的割裂问题;
-
任务对齐预测器(TAP):为分类和定位分别设计专属的预测器,通过「层注意力机制」动态聚合不同层级的交互特征,实现两个任务的特征解耦;同时新增预测对齐模块,分类分支通过空间对齐图调整得分分布,让分类高分与定位精准的空间位置强绑定;定位分支学习空间偏移,让边框的每个边界都能自适应找到最精准的锚点,进一步提升定位精度。
2、任务对齐学习(TAL)
从训练层面彻底解决任务错位问题,核心是设计了锚框对齐度量指标,并将其深度融入样本分配和损失函数设计中。
-
锚框对齐度量:设计了公式
t = s^α × u^β,其中s是分类得分,u是预测框与真值的 IoU,通过高阶组合同时衡量分类和定位的质量,量化每个锚框的任务对齐程度; -
任务对齐样本分配:摒弃了传统的几何先验分配、IoU 分配,为每个目标选择对齐度
t最高的锚框作为正样本,让正样本同时适配分类和定位两个任务,从根源上保证两个任务的学习目标对齐; -
任务对齐损失函数:分类损失用归一化的对齐度替换二元标签,让对齐度高的锚框获得更高的目标得分;回归损失用对齐度加权,让模型更关注高对齐度的样本。最终实现「分类得分高的预测框,定位一定精准」的核心目标,完美适配 NMS 的筛选逻辑。
2.2.2 性能表现
在 MS COCO test-dev 数据集上,基于 ResNeXt-101-64×4d-DCN 主干的 TOOD,达到了51.1% 的 COCO 标准 AP(IoU 0.5~0.95 平均),其中 mAP@0.5 达到 69.4%,大幅超越同期的 ATSS、GFL、PAA 等主流一阶段算法。
2.3 YOLOv8:实时检测的工业级标杆
YOLOv8 是 Ultralytics 团队在 2023 年推出的 YOLO 系列新一代作品,在 YOLOv5 的基础上完成了架构设计、训练策略、工程化能力的全面升级,兼顾了极致的速度、精度和易用性,是目前工业界实时检测场景的首选算法。
不同于 Faster R-CNN 和 TOOD 的学术向定位,YOLOv8 从设计之初就面向工业落地,不仅优化了检测算法本身,还构建了一套覆盖「数据处理 - 模型训练 - 多平台部署 - 多任务扩展」的全流程工具链,大幅降低了目标检测算法的落地门槛。
2.3.1 核心架构与创新点
1、全链路的架构升级
-
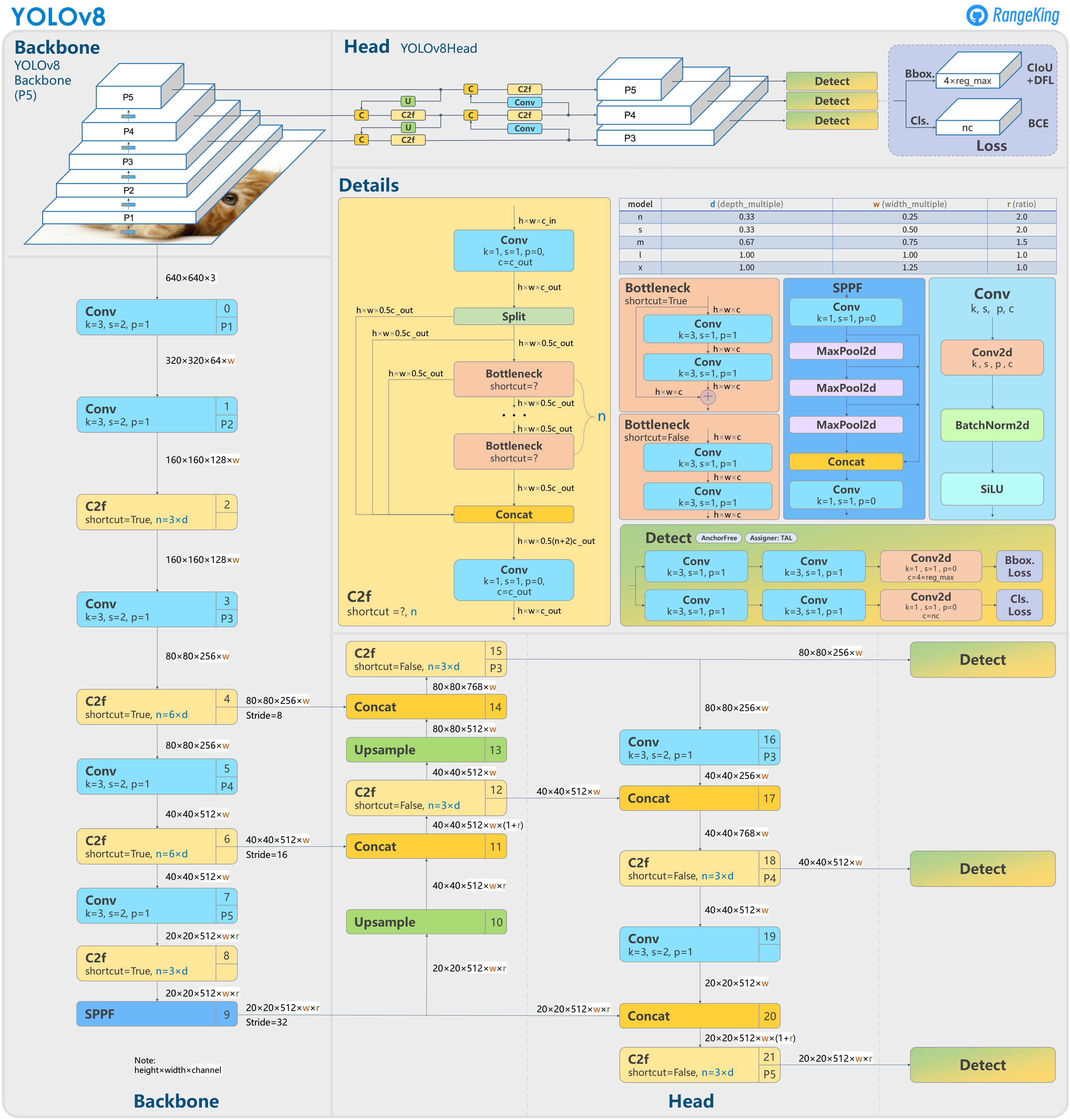
主干网络:采用改进的 CSPDarknet 架构,将 YOLOv5 的 C3 模块替换为全新的C2f 模块,引入更多的分支连接和梯度流,在轻量化的同时显著提升了特征提取能力,对小目标的特征捕捉能力大幅增强。
-
颈部网络:优化的 FPN+PAN 结构,结合 C2f 模块进一步增强多尺度特征的上下采样融合能力,更好地兼顾大、中、小目标的检测需求。
-
检测头:全面采用解耦头 + Anchor-Free 无锚框设计。一方面彻底分离分类和定位分支,解决两个任务的特征学习冲突;另一方面摒弃了 YOLO 系列沿用多年的预定义锚框,直接预测目标的中心点和宽高分布,简化了模型结构,降低了计算量,同时大幅提升了对不同数据集、不同形态目标的泛化能力。
2、训练与优化策略升级
-
内置 Mosaic、Mixup 等先进的数据增强策略,大幅提升模型的泛化能力和鲁棒性;
-
损失函数优化:分类分支采用 Focal Loss 解决类别不平衡问题,回归分支采用 CIoU/DIoU 损失结合 Distribution Focal Loss,大幅提升边框定位精度;
-
原生支持混合精度训练,大幅降低显存占用,提升训练速度,同时兼容多 GPU 分布式训练、
3、全场景覆盖能力
-
全规格模型家族:提供 n/s/m/l/x 五个不同量级的模型,从边缘端轻量化的 YOLOv8n(3.8MB),到高精度的 YOLOv8x,覆盖了从 IoT 设备、嵌入式开发板、CPU 端到高端 GPU 的全硬件场景;
-
全任务支持:一套框架原生支持目标检测、实例分割、关键点检测、图像分类、姿态估计等任务,无需维护多套算法,满足工业场景的多视觉任务需求;
-
完善的部署生态:提供统一的 Python API 和 CLI 工具,一键完成训练、验证、推理;原生支持 ONNX、TensorRT、OpenVINO、TFLite 等主流部署格式,适配几乎所有硬件平台;
-
活跃的社区生态:拥有全球最大的检测算法社区,海量的教程、二次开发项目和工业落地案例,问题解决和技术支持的门槛极低。
2.3.2 性能表现
在 MS COCO 数据集(640 分辨率)上,YOLOv8 各规格模型的核心性能如下:
| 模型规格 | mAP@0.5 | GPU 推理速度(单图) | 参数量 |
|---|---|---|---|
| YOLOv8n | 47.2% | 5.8ms | 2.0M |
| YOLOv8s | 58.5% | 6.0ms | 9.0M |
| YOLOv8m | 66.3% | 9.8ms | 25.0M |
| YOLOv8l | 69.8% | 11.5ms | 55.0M |
| YOLOv8x | 71.5% | 7.8ms | 90.0M |
三、核心维度全方位对比
为了更直观地呈现三个算法的差异,我们从算法范式、性能、工程化、优劣势等核心维度,整理了如下对比表:
| 对比维度 | Faster R-CNN | TOOD | YOLOv8 |
|---|---|---|---|
| 算法范式 | 两阶段(提案生成 + 分类回归) | 一阶段(端到端预测,精度优先) | 一阶段(端到端预测,实时优先) |
| 核心创新 | 共享卷积的 RPN 网络,Anchor 机制,统一两阶段架构 | T-Head 任务对齐头,TAL 任务对齐学习,解决分类 - 定位错位问题 | C2f 模块,Anchor-Free 解耦头,全场景模型家族,极致工程化 |
| 经典主干 | VGG-16、ResNet 系列 | ResNet 系列、ResNeXt 系列、DCN 增强 | CSPDarknet,原生适配 n/s/m/l/x 全系列 |
| COCO 精度峰值 | 42.7% mAP@0.5(VGG16);59.0% mAP@0.5(ResNet101) | 51.1% 标准 AP(IoU0.5-0.95);69.4% mAP@0.5 | 71.5% mAP@0.5(YOLOv8x);37.3% 标准 AP(YOLOv8x) |
| 推理速度(GPU) | 5fps(VGG16,全流程);17fps(ZFNet) | 中大型主干下侧重精度,实时性弱于 YOLO 系列 | 5.8~11.5ms / 帧(640 分辨率),最高 170+fps |
| 锚框设计 | Anchor-Based(3 尺度 + 3 宽高比,9 锚 / 位置) | 支持 Anchor-Based/Anchor-Free,单锚点设计 | 全 Anchor-Free 无锚框设计,彻底摒弃手工先验 |
| 训练难度 | 中等,两阶段交替训练,收敛速度较慢 | 中等,超参数敏感,训练周期长于 YOLO | 极低,一键式训练,内置调优策略,收敛速度快 |
| 部署难度 | 较高,两阶段结构复杂,边缘端优化难度大 | 较高,结构定制化强,端侧适配工作量大,官方工程化支持弱 | 极低,原生支持多格式导出,全平台适配,社区生态完善 |
| 核心优势 | 检测精度高,定位精度和小目标召回率突出,对遮挡目标鲁棒性强 | 解决一阶段检测的任务错位问题,分类 - 定位对齐度高,高精度场景优势显著 | 速度与精度极致平衡,全场景覆盖,工程化完善,落地成本极低,生态丰富 |
| 核心短板 | 推理速度慢,无法满足高实时性场景,计算量大 | 实时性不足,工程化支持弱,工业落地案例少,结构灵活性差 | 极致高精度场景下,相比两阶段算法,定位精度和召回率存在差距 |
注:COCO 标准 AP 指 IoU 从 0.5 到 0.95 的平均精度,是 COCO 赛事的官方核心指标;mAP@0.5 指 IoU 阈值为 0.5 时的平均精度,两者不可直接横向对比。
四、工业落地选型指南
优先选择 Faster R-CNN 的场景
-
高精度非实时检测场景:比如卫星遥感影像分析、医疗影像病灶检测、工业精密缺陷检测,对帧率要求极低(<1fps),但对定位精度、目标召回率要求极高,不能出现漏检;
-
小目标、密集遮挡目标检测:比如安防监控中的远距离小目标、拥挤场景的行人 / 车辆检测,两阶段的提案机制能带来更高的召回率和定位精度;
-
学术研究与基线对比:两阶段检测的经典基线,用于检测相关研究的复现、对比实验和创新验证。
优先选择 TOOD 的场景
-
一阶段高精度算法学术研究:聚焦于一阶段检测的精度优化、任务对齐、样本分配、损失函数设计等方向的研究,TOOD 是极佳的基线和创新基础;
-
非实时的高精度一阶段检测:比如批量图片的离线检测、视频的离线结构化分析,对速度要求不高,但需要一阶段算法的简洁性,同时对分类和定位的对齐度要求高,避免高分低质框的问题;
-
算法创新验证:针对检测任务的分类 - 定位协同优化、端到端检测范式等方向的创新,TOOD 的框架能很好地支撑相关实验。
优先选择 YOLOv8 的场景
-
工业实时检测场景:比如产线缺陷实时检测、自动驾驶环境感知、机器人视觉导航、安防实时监控、直播视频实时分析等,对帧率、推理延迟有严格要求,同时需要稳定的检测精度;
-
边缘端 / 端侧部署:比如嵌入式开发板、IoT 设备、移动端 APP、工业相机的端侧推理,YOLOv8 的轻量化模型(n/s 版本)能在低算力设备上实现流畅运行,同时部署工具链完善,适配成本极低;
-
快速落地与业务原型验证:创业项目、业务快速试错、算法 POC 验证,YOLOv8 的一键式训练、极低的调参成本、完善的生态,能大幅缩短算法开发和落地的周期;
-
多任务一体化需求:业务需要同时做目标检测、实例分割、关键点检测、姿态估计等多个视觉任务,YOLOv8 原生支持多任务,一套框架就能满足全场景需求,无需维护多套算法。
五、总结与未来趋势
Faster R-CNN、TOOD、YOLOv8 三个算法,分别代表了目标检测发展历程中的三个重要方向:两阶段检测的奠基、一阶段检测的精度突破、实时检测的工业级落地。
从目标检测的技术发展趋势来看,核心方向主要集中在这几点:
-
精度与速度的极致平衡:无论是两阶段还是一阶段算法,都在朝着「更快、更准、更轻量」的方向发展,尤其是面向边缘端的轻量化检测算法,仍是学术研究和工业落地的核心热点;
-
任务协同与统一建模:从 TOOD 的双任务对齐,到检测、分割、跟踪、重建等多视觉任务的统一建模,多任务协同学习、端到端统一视觉模型是重要的发展方向;
-
无先验的端到端检测:从 Anchor-Based 到 Anchor-Free,再到基于 Transformer 的 DETR 系列,摒弃手工先验、减少人工设计、实现完全端到端的检测,是检测算法长期的发展趋势;
-
工程化与落地适配:算法的最终价值体现在产业落地,像 YOLO 系列这样兼顾算法性能和工程化能力的框架,会持续成为工业界的主流,降低 AI 视觉技术的落地门槛。

立足具身智能前沿赛道,致力于搭建全球化、开源化、全栈式技术交流与实践共创平台。
更多推荐

 6
6 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)