从urdf到rviz2到ros2_control到Moveit2和Gazebo仿真——一个综合的ROS2仿真机械臂训练项目笔记
这是一篇关于ROS2机械臂仿真的学习笔记摘要,主要内容包括: 介绍了Moveit2的功能和原理,它集成轨迹规划、碰撞检测等功能,通过配置助手可快速生成机械臂控制方案。 简述了Gazebo仿真环境和ROS2控制框架(ros2_control)的作用。 详细记录了从基础URDF建模到集成Moveit2和Gazebo的完整开发流程: 手写URDF定义机械臂连杆和关节 添加ros2_control插件实现
urdf、rviz2、ros2_control、Moveit2、Gazebo仿真综合ROS2仿真机械臂项目实战笔记
声明:该文是本人在b站学习up主 后来老师 和 路一直都在456 共创的 机械臂仿真实战课程的一篇笔记,仅作整理思路和复习用,写的不太严谨,如有侵权请联系。
推荐各位去看看两位up主的b站学习链接:https://www.bilibili.com/video/BV1SBunzJEdE?vd_source=85ae0151c01007a142f774fee35d0e85
Moveit2介绍
功能
这是一个内部集成了多种轨迹规划器、碰撞检测、规划组的运动控制库,主要用于机械臂的控制。
得益于moveit2配置助手,我们仅需一个含有基本标签(visual、collision、internia)的urdf就可以通过一步步的简单图形化界面配置得到一个带有ros2_control控制器以及moveit规划器的机械臂,我认为这是moveit2最强大的地方。在配置助手中,我们还可以可视化地配置一些预设动作,方便测试和完成简单任务。
它还预留了编程接口,使得我们能在代码中使用几个简单的控制函数即可控制机械臂。
通过moveit配置得到一堆配置文件之后,再将xacro插件和launch稍加改动即可在gazebo中联动。
补充:ros2_control是一个集成了资源管理器、控制器、底层硬件接口的控制库。它以资源管理器为中心(controller_manager),连接了上层的控制器(controllers)以及下层的硬件接口(hardware_interface),核心设计思想是在接入不同硬件的时候只需要修改hardware_interface的函数与下位机联系,而上层应用(控制器)能够被复用,高层常用算法不用再“造轮子”。
原理
moveit2是基于ros2_control编写的高层规划运动库,实际的控制执行器是由ros2_control提供的。相当于ros2_control是moveit2的下位机,moveit2负责更高层的每一个move_group运动规划和碰撞检测,而ros2_control负责控制信号(关节状态)的发出。
Gazebo介绍
功能
用于进行模型的仿真,运动仿真等。内部集成了物理引擎。
使用方法
将带有gazebo标签的urdf文件通过launch导入到节点中即可
通过定义sdf模型可以自定义gazebo中的模型(sdf文件可定义摩擦力)
综合的仿真机械臂项目介绍
环境与ROS2库
ubuntu24.04、ros2 jazzy、moveit2、rviz2、gazebo(默认最新版)、joint_state_publisher_gui
学习大纲
各模块介绍
urdf
(连杆:碰撞、惯性、可视部分(形状、颜色)origin;关节:旋转、origin)
连杆:
<link name="link1">
<inertial>
<origin xyz="0.0 0.0 0.05" rpy="0.0 0.0 0.0"/>
<mass value="1.0"/>
<inertia ixx="0.01" ixy="0.0" ixz="0.0" iyy="0.01" iyz="0.0" izz="0.001"/>
</inertial>
<visual>
<geometry>
<cylinder radius="0.05" length="0.1"/>
</geometry>
<origin xyz="0.0 0.0 0.05" rpy="0.0 0.0 0.0"/>
<material name="pink">
<color rgba="1.0 0.0 1.0 1.0"/>
</material>
</visual>
<collision>
<geometry>
<cylinder radius="0.05" length="0.1"/>
</geometry>
<origin xyz="0.0 0.0 0.05" rpy="0.0 0.0 0.0"/>
</collision>
</link>
关节:
<joint name="joint1" type="revolute">
<parent link="base_link"/>
<child link="link1"/>
<origin xyz="0.0 0.0 0.1" rpy="0.0 0.0 0.0"/>
<axis xyz="0.0 0.0 1.0"/>
<limit lower="-3.14" upper="3.14" effort="100.0" velocity="1.0"/>
</joint>
launch:在launch中打开带有配置参数的多节点,通过launch启动多节点
rviz2:将模型可视化、moveit可视化
moveit2:配置urdf为能动的机械臂
gazebo:夹取物体仿真(未做)
ros2_control: controller_manager、hardware_interface(略讲)、controllers、在urdf中的插件、yaml配置
各部分的关联性
-
从0手搓可以动的机械臂:urdf ->加入ros2_control控制插件以及配置yaml文件 得到ros2_control.urdf -> 运行在rviz2中(可用joint_state_publisher_gui功能包进行初步的可视化关节控制) -> 自己编写控制节点代替掉joint_state_publisher_gui(通过/arm_controller/joint_trajectory话题进行控制,也可以通过动作控制(未完成)) -> 最终得到能在rviz中通过代码动起来的机械臂。
-
**moveit2搓出可以动的机械臂:**urdf -> 使用moveit2得到已经集成了控制器的xacro模型 -> 在rviz2中使用(moveit插件)可视化执行运行。
相当于moveit给我们省去了配置ros2_control的工作,在此基础上还多了规划组分类、预设动作、可视化显示、简化编程接口等功能,非常强大。
- 由从moveit2配置后的模型得到能在gazebo中运行的机械臂: 只需要在xacro、launch里面增加gazebo与ros2_control通讯的插件、gazebo启动节点、gazebo与ros的时钟桥接,gazebo中加载机械臂的节点,即可。下文会仔细讲解。
正式开始
文件目录:
ARM_WS/
├── build/
├── install/
├── log/
└── src/
├── arm1/ ---->从0手搓可以动的机械臂 功能包
│ ├── __pycache__/
│ ├── __init__.py
│ ├── test_arm_topic_control.py ---> 使用话题通讯控制arm规划组
│ ├── test_hand_control.py ---> 使用话题通讯控制hand规划组
│ ├── config/
│ │ ├── arm_controllers.yaml ---> ros2_control控制器配置文件
│ │ └── rviz.rviz ---> rviz2页面配置文件
│ ├── launch/
│ │ ├── arm_ros2_control_urdf_launch.py ---> 在rviz2中打开带有ros2_control控制器的机械臂,并打开手臂控制节点
│ │ ├── arm_urdf_launch.py ---> 在rviz2中打开原始的机械臂模型
│ │ └── hand_control_launch.py ---> 在rviz2中打开带有ros2_control控制器的机械手,并打开夹爪控制节点
│ ├── resource/
│ ├── test/
│ ├── urdf/
│ │ ├── arm_ros2_control.urdf ---> 带有ros2_control控制器的机械臂模型
│ │ ├── arm.urdf ---> 原始的机械臂模型
│ │ └── robot.urdf ---> 简单的urdf模型示例
│ ├── LICENSE
│ ├── package.xml
│ ├── setup.cfg
│ └── setup.py ---> 编译配置文件
├── moveit_config/ ----> moveit2搓出可以动的机械臂(由moveit配置助手得到的文件)
│ ├── config/
│ │ ├── initial_positions.yaml
│ │ ├── joint_limits.yaml --->关节限位,需要将整数改为浮点数、并把a、v、p限位改为true!!!
│ │ ├── kinematics.yaml
│ │ ├── moveit_controllers.yaml
│ │ ├── moveit.rviz
│ │ ├── pilz_cartesian_limits.yaml
│ │ ├── robot_name.gazebo.ros2_control.xacro
│ │ ├── robot_name.ros2_control.xacro ----> moveit2生成的带ros2_control标签的模型
│ │ ├── robot_name.srdf ---->机械臂描述文件
│ │ ├── robot_name.urdf.xacro ----> moveit2生成的原始模型
│ │ └── ros2_controllers.yaml ---> ros2_control控制器配置文件
│ ├── launch/
│ │ ├── demo.launch.py ---->配置完moveit后就可以跑的机械臂(集成了下面其他的launch)
│ │ ├── gazebo.launch.py ----->自己编写改造的,用于打开gazebo中跑机械臂模型
│ │ ├── move_group.launch.py
│ │ ├── moveit_rviz.launch.py
│ │ ├── rsp.launch.py
│ │ ├── setup_assistant.launch.py
│ │ ├── spawn_controllers.launch.py
│ │ ├── static_virtual_joint_tfs.launch.py
│ │ └── warehouse_db.launch.py
│ ├── .setup_assistant
│ ├── CMakeLists.txt
│ └── package.xml
└── moveit_motion_api/ ----> 使用moveit2的python编程接口完成控制
├── config/
│ └── moveit_cpp.yaml ---> 使用编程接口前所需的配置文件(基本是固定模板)
├── moveit_motion_api/
│ ├── __pycache__/
│ ├── __init__.py
│ └── test1.py ---> 使用moveit接口编程实现对机械臂的控制(基本是固定模板)
├── resource/
├── test/
├── LICENSE
├── package.xml
├── setup.cfg
└── setup.py ---> 节点编译配置
arm功能包——从launch入手介绍由urdf、rviz、ros2_control完成对仿真机械臂的建模与控制(moveit的基础知识)
我将从launch出发来一个个介绍节点各自的作用,以及各组件之间如何连接产生通讯(什么话题、服务、joint_state),为了方便学习,我以行内注释的方式来介绍各个节点作用:
from launch import LaunchDescription
from ament_index_python import get_package_share_directory
from launch_ros.actions import Node
package_path = get_package_share_directory('arm1')
print("package_path:",package_path)
urdf_path = package_path + "/urdf/arm_ros2_control.urdf"
ros2_control_yaml_path = package_path + "/config/arm_controllers.yaml"
rviz_config_path = package_path + "/config/rviz.rviz"
robot_desc = open(urdf_path).read() #得到urdf描述文件
def generate_launch_description():
robot_desc_node = Node( #该节点将urdf描述文件解析,得到并发布每个关节的状态
package="robot_state_publisher",
executable="robot_state_publisher",
name = "robot_state_publisher",
output = "both",
parameters=[
{"use_sim_time":True},
{"robot_description":robot_desc}
],
)
rviz_node = Node( #以打开个性化配置好之后的rviz界面,和直接打开rviz没什么区别。
package="rviz2",
executable="rviz2",
name= "rviz",
arguments=["-d",rviz_config_path],
)
contorller_manager_node = Node( #打开ros2_control的中心管理节点,使用ros2_control的控制器时固定需要打开
package="controller_manager",
executable="ros2_control_node",
output = "both",
parameters=[ros2_control_yaml_path],
)
#生成由yaml配置好的ros2_control控制器,argument里面的控制器需要与arm_controllers.yaml内的名称一致
contorller_node = Node(
package="controller_manager",
executable="spawner",
name = "controller_node",
output = "both",
arguments=['arm_controller','hand_controller','joint_state_broadcaster'],
)
test_arm_topic_control = Node( #打开自己编写的控制节点(通过ros2_control控制器暴露出来的话题进行通讯)
package="arm1",
executable="test_arm_topic_control",
)
return LaunchDescription(
[robot_desc_node, #解析urdf、发布关节信息
rviz_node, #打开rviz
contorller_manager_node, #打开ros2_control
contorller_node, #生成ros2_control控制器
test_arm_topic_control #机械臂控制节点
]
)
moveit_config——使用moveit2配置助手快速将urdf配置为可以在rviz2中可视化运动的机械臂
这位博主写的蛮好的,参考这个即可:【Moveit2】使用moveit_setup_assistant配置自己的机械臂功能包-CSDN博客
注意:
-
需要所有规划组相关的配置同名
-
目前moveit2官方存在的问题:需要手动修改joint_limit.yaml的整数为浮点数并将各个关节的加速度、速度、位置限制改为true
拓展:
添加gazebo相关的插件,实现通过在rviz2中的控制,控制gazebo中的机械臂运动。
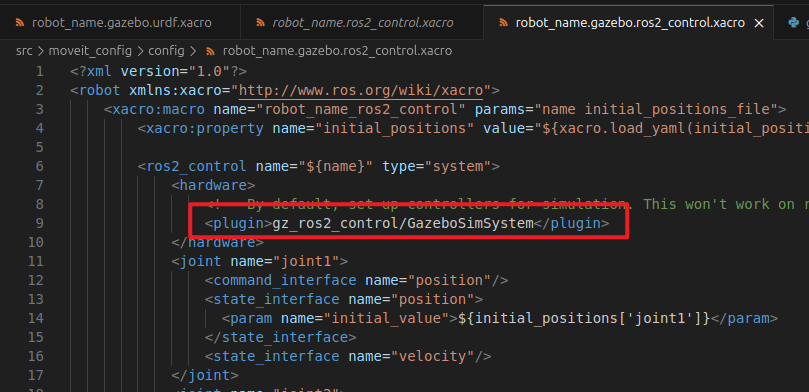
- 需要修改ros_control.urdf的hardware中的插件为gz_ros2_control/GazeboSimSystem
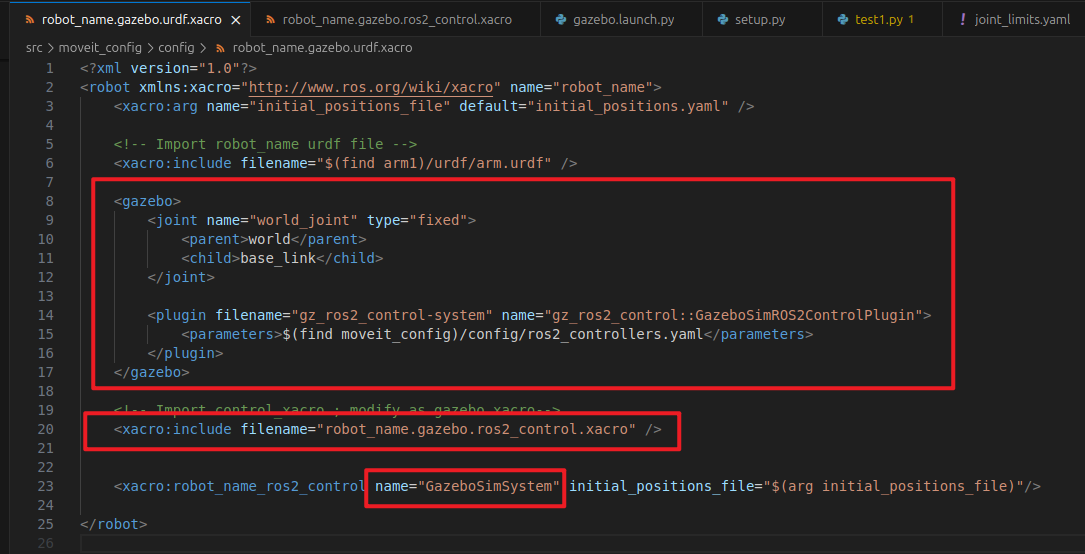
- 除此之外,需要增加gazebo组件,来建立和ros2_control的链接。
-
在launch中,需要打开gazebo的节点,需要将机械臂传入gazebo的节点,需要一个转化的时钟,以及其他的配置如图:
 ,前两个就是gazebo相关的节点、第三个是连接ros2和gazebo的时钟信息类型转化节点、第四个是将urdf转化为关节信息的节点、第五个是打开rviz,第六个是打开ros2_control中的controller_manager节点的,第七个是ros2_control生成控制器的,第八个是moveit的算法节点。
,前两个就是gazebo相关的节点、第三个是连接ros2和gazebo的时钟信息类型转化节点、第四个是将urdf转化为关节信息的节点、第五个是打开rviz,第六个是打开ros2_control中的controller_manager节点的,第七个是ros2_control生成控制器的,第八个是moveit的算法节点。 -
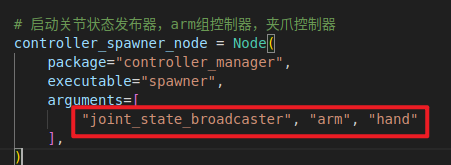
注意:第七个是ros2_control生成控制器的参数配置要与yaml中的相对应:
moveit_motion_api——使用moveit2的Python编程接口,用代码实现对机械臂的控制
- moveit_cpp.yaml,要规范声明各种规划器、planner_id等
planning_scene_monitor_options:
robot_description: "robot_description"
joint_state_topic: "/joint_states"
attached_collision_object_topic: "/moveit_cpp/planning_scene_monitor"
publish_planning_scene_topic: "/moveit_cpp/publish_planning_scene"
monitored_planning_scene_topic: "/moveit_cpp/monitored_planning_scene"
wait_for_initial_state_timeout: 10.0
planning_pipelines:
pipeline_names: ["ompl", "pilz_industrial_motion_planner", "chomp"]
plan_request_params:
planning_attempts: 1
planning_pipeline: ompl
max_velocity_scaling_factor: 1.0
max_acceleration_scaling_factor: 1.0
ompl_rrtc: # Namespace for individual plan request
plan_request_params: # PlanRequestParameters similar to the ones that are used by the single pipeline planner
planning_attempts: 5 # Number of attempts the planning pipeline tries to solve a given motion planning problem
planning_pipeline: ompl # Name of the pipeline that is being used
planner_id: "RRTConnectkConfigDefault" # Name of the specific planner to be used by the pipeline
max_velocity_scaling_factor: 1.0 # Velocity scaling parameter for the trajectory generation algorithm that is used.
max_acceleration_scaling_factor: 1.0 # Acceleration scaling parameter for the trajectory generation algorithm that is used.
planning_time: 5.0 # Time budget for the motion plan request. If the planning problem cannot be solved within this time, the request will be aborted.
pilz_lin:
plan_request_params:
planning_attempts: 1
planning_pipeline: pilz_industrial_motion_planner
planner_id: "PTP"
max_velocity_scaling_factor: 1.0
max_acceleration_scaling_factor: 1.0
planning_time: 0.8
chomp_planner:
plan_request_params:
planning_attempts: 1
planning_pipeline: chomp
max_velocity_scaling_factor: 1.0
max_acceleration_scaling_factor: 1.0
planning_time: 1.5
-
Python中导入接口相关的包、写固定格式的moveit2代码框架。
-
常用的控制函数示例。 2. 3. 的完整代码如下:
import time
import rclpy
from rclpy.logging import get_logger
from moveit.core.robot_state import RobotState
from moveit.planning import (
MoveItPy,
MultiPipelinePlanRequestParameters,
)
from moveit_configs_utils import MoveItConfigsBuilder
from geometry_msgs.msg import PoseStamped
def plan_and_execute(
robot,
planning_component,
logger,
single_plan_parameters=None,
multi_plan_parameters=None,
):
"""一个辅助函数,用于规划和执行轨迹。"""
logger.info("Starting trajectory planning.")
plan_result = None
if multi_plan_parameters is not None:
plan_result = planning_component.plan(
multi_plan_parameters=multi_plan_parameters
)
elif single_plan_parameters is not None:
plan_result = planning_component.plan(
single_plan_parameters=single_plan_parameters
)
else:
logger.info("No specific parameters provided. Planning with defaults.")
plan_result = planning_component.plan()
if plan_result and plan_result.trajectory:
logger.info("Planning succeeded. Executing plan.")
robot_trajectory = plan_result.trajectory
execution_result = robot.execute(robot_trajectory, controllers=[])
if execution_result:
logger.info("Plan executed successfully.")
else:
logger.error("Plan execution failed!")
else:
logger.error("Planning failed. No valid trajectory found.")
def main():
# MoveItPy Setup
rclpy.init()
logger = get_logger("moveit_py_pose_goal")
path = "/home/lzy/arm_ws/src/moveit_motion_api/config/moveit_cpp.yaml"
print(f'moveit cpp config path is :{path}')
moveit_config = (
MoveItConfigsBuilder(
robot_name="arm", package_name="moveit_config"
)
.moveit_cpp(path)
.to_moveit_configs()
)
params = moveit_config.to_dict() # 节点moveitpy的参数
# instantiate MoveItPy instance and get planning component
robot = MoveItPy(node_name="moveit_py", config_dict=params)
arm_group = robot.get_planning_component("arm")
hand_group = robot.get_planning_component("hand")
logger.info("MoveItPy instance created")
print(robot)
# 延时时间
sleep_duration = 5.0
# 1. 规划到预定义的“ready”位置
arm_group.set_start_state(configuration_name="stand")
hand_group.set_start_state(configuration_name="open")
arm_group.set_goal_state(configuration_name="ready")
hand_group.set_goal_state(configuration_name="close")
plan_and_execute(robot, arm_group, logger)
time.sleep(1.0)
plan_and_execute(robot, hand_group, logger)
time.sleep(sleep_duration)
print("-------------------- First plan executed. --------------------")
# 2. 规划到指定的关节角位置
robot_model = robot.get_robot_model()
robot_state = RobotState(robot_model)
robot_state.set_joint_group_positions('arm', [0, -0.4, -0.79, -0.79, -1.10, 1.55])
arm_group.set_goal_state(robot_state=robot_state)
arm_group.set_start_state_to_current_state()
plan_and_execute(robot, arm_group, logger)
time.sleep(sleep_duration)
print("-------------------- Second plan executed. --------------------")
# 3. 规划到指定的笛卡尔坐标(i can't run it ,because i can't find a vaild goal)
pose_goal = PoseStamped()
pose_goal.header.frame_id = "base_link"
pose_goal.pose.orientation.x = 0.71
pose_goal.pose.orientation.y = 0.71
pose_goal.pose.position.x = 0.01
pose_goal.pose.position.y = 0.01
pose_goal.pose.position.z = 0.01
arm_group.set_start_state_to_current_state()
arm_group.set_goal_state(pose_stamped_msg=pose_goal, pose_link="gripper_base_link")
plan_and_execute(robot, arm_group, logger)
time.sleep(sleep_duration)
print("-------------------- Third plan executed. --------------------")
rclpy.shutdown()
if __name__ == "__main__":
main()
- 配置setup、编译.
Bug_list(简记)
ros2_control
- yaml文件的缩进很严格;以及冒号之后需要加个空格才写对应的值;如果值换行了,则需要缩进并且写上“-”符号,再加一个空格,再写值
- 每在launch中添加了一个文件路径,都要记得在setup中的data_file中声明;如果是可执行的控制节点,则还需要在entry_point里面声明入口
- interface_name没有s;
- 使用colcon build --symlink_install之后如果有文件路径的修改,需要先rm -r log/ install/ build/
- 在写launch的时候 ,注意parameter和argument的区别,前者一般是键值对,也可能不是(如果只有一个参数的话可以直接写值),是会加载到ros节点里面的;后者相当于在终端命令行中输入命令
- 在写node的时候,package、executable,之间要有逗号
- 在写launch的controller_manager_node的时候,不要写name,似乎是内部已经写死了的,不能改名
- 如果不写name,默认是和executable的名字一致
- ros_control yaml文件中的type可以去github上找(先找对应版本的分支,然后找对应的控制器),,type中斜杠前的部分是文件名,斜杠后是类名,,而参数大全可以在github上的src的yaml里面找到所有描述
- hardware_interface一般需要自己编写,github上只找到了仿真用的mock_components/GenericSystem插件。
基于ros2_control的gazebo仿真:
!!!在使用最新版的gazebo的时候,在虚拟机中记得设置关闭3d渲染加速,否则就会黑屏/白屏
Moveit2
- 在配置的时候,记得在perception 3d sensor中选择none
- 保证每个关节组、控制器的名字都是一样的
- 加个虚拟关节 父关节是world 子关节是base_link
- hand选择gripper控制器,arm选择follow trajectory控制器,arm选择k开头的规划器,选择bizzrt算法;hand选择none
- 在生成文件之后,生成的joint_limit.yaml有bug,需要进去把整数改为浮点数,并且全部改成true,并且需要给每个值一个非零的值。
- 在最开始选择文件的时候,选择的是没有其他额外插件的原始urdf版本
moveit2编程接口
- 使用末端执行器坐标的方法还没成功,可能与坐标设置有问题,需要设置一个合理的position 或者是base_link不存在。
- 都有大致的框架,照抄,省得出错。
小结
简单由moveit2得到一个能动的机械臂
-
创建功能包,建立urdf
-
打开moveit_setup_assistant setup (tab键补全)节点,进入可视化界面配置
-
修改有bug的joint_limit.yaml,需要进去把整数改为浮点数,并且全部改成true,并且需要给每个值一个非零的值。
-
运行demo.launch.py打开rviz2进行可视化控制
-
或者创建功能包,建立config文件夹,配置moveit_cpp.yaml文件,然后编写py节点进行代码编程控制。
将moveit2配置好的机械臂显示到gazebo中进行控制
-
复制一份robot_name.ros2_control.xacro文件,然后将hardware标签里的plugin插件由mock_components/GenericSystem改为gz_ros2_control/GazeboSimSystem
-
复制一份robot_name.urdf.xacro文件,然后按图修改内容
-
修改launch,增加gazebo_node,robot_to_gazebo_node, clock_bridge_node,节点。
不使用moveit,使用ros2_control控制机械臂
- 建立原始urdf
- 配置arm_controllers.yaml的ros2_control控制器配置文件
- 复制一份原始urdf,增加ros2_control的标签
- 在launch中增加contorller_manager_node, contorller_node,节点来打开ros2_control的控制接口
- 编写控制节点代码py文件
- 把控制节点也写入launch
- 运行
如果需要学习代码,请私聊我,最近还没整理好,整理好之后会把代码放到github上
未来展望
-
以动作通讯的方式完成基于ros2_control对机械臂的控制
-
自己编写一个hardware_interface,搭建实物机械臂进行舵机控制
-
写入一些原子动作(action),以机械臂为载体,实验一些强化学习算法
png" alt=“image-20250908191028425” style=“zoom: 80%;” /> -
修改launch,增加gazebo_node,robot_to_gazebo_node, clock_bridge_node,节点。
不使用moveit,使用ros2_control控制机械臂
- 建立原始urdf
- 配置arm_controllers.yaml的ros2_control控制器配置文件
- 复制一份原始urdf,增加ros2_control的标签
- 在launch中增加contorller_manager_node, contorller_node,节点来打开ros2_control的控制接口
- 编写控制节点代码py文件
- 把控制节点也写入launch
- 运行
如果需要学习代码,请私聊我,最近还没整理好,整理好之后会把代码放到github上
未来展望
- 以动作通讯的方式完成基于ros2_control对机械臂的控制
- 自己编写一个hardware_interface,搭建实物机械臂进行舵机控制
- 写入一些原子动作(action),以机械臂为载体,实验一些强化学习算法
- 自己编写一个controller,将学到的控制理论写成代码

立足具身智能前沿赛道,致力于搭建全球化、开源化、全栈式技术交流与实践共创平台。
更多推荐
 22
22 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)