点云(point cloud):自动驾驶的“三维扫描图“
点云(Point Cloud):就是用很多“点”来表示一个物体或场景的三维形状和结构。(用点描绘的3D画,好比素描,但不是用线条勾勒,而是“点点点点”拼出物体形状)

观察这幅图像,你可以注意到以下几点:
- 由“点”构成:整个场景,无论是车辆、建筑还是树木,都不是由连续的面构成的,而是由大量离散的点组成的。每个点代表了激光雷达扫描到的一个真实世界中的位置。
- 三维立体感:尽管是2D图像,但你可以清晰地感知到场景的深度和物体的三维形状。这是因为每个点都记录了精确的 (X, Y, Z) 空间坐标。
- 密度变化:离LiDAR传感器近的物体或者表面积大的物体,其点云密度通常会更高,看起来更“实”一些。远处的物体或者细节少的物体,点云可能相对稀疏。
- 轮廓和形状:通过点的分布,我们可以清晰地辨认出不同物体的轮廓和大致形状。自动驾驶系统正是通过分析这些点的集合来识别和理解周围环境的。
- (可能的)强度/颜色信息:有些点云图像还会用颜色或亮度来表示点的反射强度或其他属性。例如,路面、车身、树叶对激光的反射特性不同,在点云中可能会以不同的颜色或灰度值呈现,这有助于区分不同材质的物体。在这张生成的图片中,不同颜色或点的密度可能暗示了这些信息。
这正是点云的核心特征。自动驾驶汽车的“大脑”看到的就是类似这样的数据,并通过算法来解读这些点,从而“看懂”世界。

在自动驾驶系统中,精确地知道自己在哪儿、周围有什么、要怎么走,是决策与规划的基础。这就依赖于感知与定位技术。
其中,点云数据(空间中的“稀疏”结构数据,不像图像是密集的像素网格)就是一套非常重要的“眼睛”和“大脑素材”:
- 它来自激光雷达(LiDAR),能生成三维立体信息;
- 它能帮助实现精准定位(SLAM)和三维地图(高精地图)构建;
- 它还能在恶劣天气下提供稳定的感知信息。
| 特性 | 点云(LiDAR) | 图像(Camera) |
|---|---|---|
| 精度 | 距离测量更准,厘米级 | 仅通过像素深度感知,误差大 |
| 天气适应性 | 雾霾/雨雪下依然有效 | 遇到遮挡或亮度差可能失效 |
| 数据稀疏性 | 点之间不连续,数据结构复杂 | 像素连续,结构规则 |
| 处理难度 | 特征提取需特殊算法(如稀疏卷积) | CNN适配好,训练成熟 |
点云本质上是由激光雷达(LiDAR)等传感器扫描生成的高密度三维点的集合。每一个点都精确记录了物体的空间信息和表面特性。
| 应用领域 | 技术支持 | 作用说明 |
|---|---|---|
| 定位与建图 | SLAM算法(如ICP点云配准) | 让车知道自己在哪,建立环境地图 |
| 感知与识别 | 点云检测、分割、跟踪算法 | 识别障碍物、路缘、行人、车道线等三维结构 |
| 路径规划与导航 | 点云高精地图 + 实时感知数据 | 提供几何细节供决策模块规划安全路径 |
- 核心数据维度:
- 空间坐标 (Spatial Coordinates):物体在三维空间中的精确位置,用X、Y、Z三个轴向的数值来表示。这些坐标的精度可以达到厘米级别,甚至毫米级别。这种高精度对于自动驾驶汽车识别小型障碍物、精确判断车道边界、以及在高精度地图中进行定位至关重要。
- 反射强度 (Intensity): 反映物体表面对激光的反射率,有助于区分不同材质(如金属、植被、沥青路面)。
- 时间戳 (Timestamp): 纳秒级精度,记录每个点的采集时间,对于动态物体跟踪和运动状态估计至关重要。
- (可选) 颜色信息 (RGB): 部分先进的LiDAR系统或通过与摄像头数据融合,可以为点云赋予颜色,增强场景理解。
- (可选) 多回波信息 (Multi-return): 激光脉冲可能与多个物体发生作用(如穿过树叶),记录多次回波能提供更丰富的场景细节。
| 技术方向 | 代表方法/策略 | 作用 |
|---|---|---|
| 点云配准 | ICP(Iterative Closest Point) | 估计连续帧间的相对位置变化 |
| 特征提取 | VoxelNet、PointNet、稀疏卷积 | 从点云中提取语义/几何信息 |
| 数据优化 | 点云稀疏化、压缩、层级编码 | 降低带宽/存储/算力压力 |
| 多模态融合 | 点云 + 图像 + 雷达 | 弥补单一传感器弱点,提升鲁棒性 |
- 数据规模与处理:
- 生成速率: 先进的LiDAR传感器每秒可生成数百万甚至上千万个点。例如,某些高线束LiDAR(如128线或更高)能达到每秒数百万点,为环境提供极高密度的细节。
- 实时处理挑战: 如此庞大的数据量对车载计算平台的处理能力提出了极高要求,需要高效的算法进行实时分析。
生成原理:光速“尺子”的奥秘
激光雷达的工作原理类似于一把**“光速尺子”,通过飞行时间 (Time of Flight, ToF)** 原理精确测量距离:
- 发射激光脉冲: LiDAR系统向周围环境发射特定波长(常见如905nm或1550nm)的激光束。
- 遇到物体反射: 激光脉冲照射到物体表面后发生反射。
- 接收反射信号: LiDAR内部的探测器接收返回的激光信号。
- 计算往返时间差: 精密计时器测量激光从发射到接收所用的时间 Δt\Delta tΔt。
- 距离换算: 根据光速 ccc(约为 3×1083 \times 10^83×108 米/秒),计算出距离 D=(c×Δt)/2D = (c \times \Delta t) / 2D=(c×Δt)/2。
通过高速旋转扫描机制(如机械旋转镜面、MEMS微振镜)或相控阵技术(固态LiDAR),结合精确的角度编码器,LiDAR能够实现对周围环境进行360°无死角的快速扫描。例如,最新的高分辨率LiDAR(如超过200线的传感器或等效固态LiDAR)能够在数百米外清晰探测到小型障碍物,并具备出色的远距离感知能力。
自动驾驶应用
点云技术是自动驾驶感知、定位和决策规划等多个核心环节的基石。
-
核心问题:我是谁?我在哪?自动驾驶车首先得精确知道自己的位置,并且有一张超级详细的地图。
-
点云的作用:
- SLAM (同步定位与地图构建):你可以把SLAM想象成,汽车一边开车,一边用激光雷达(LiDAR,点云的主要来源)扫描周围,生成一帧帧的点云图像。通过对比新旧点云图像的差异(比如用ICP算法这样的匹配技术),汽车就能算出自己移动了多少、转向了多少(这就是位姿估计),同时把这些点云拼起来,实时创建或更新一张环境的3D地图(稠密地图生成)。这在GPS信号不好的地方(如隧道、高楼林立的城市)或者天气恶劣时尤其重要,能让车子“心中有数”。
- 高精地图 (HD Maps):基于点云制作的高精地图,不仅仅是导航用的路线图,它包含了道路的精确三维形状、路边多高(路缘)、交通标志牌在哪、车道线怎么画等等非常精细的几何信息。这就像给汽车一本“指南”,告诉它所有静态环境的细节。
-
当下趋势:
- 众包建图与实时更新:越来越多的量产车搭载了LiDAR,它们在行驶过程中收集的点云数据可以通过云端共享,用于构建和实时更新高精地图,让地图“活”起来,反映最新的道路变化。
- 与AI结合的SLAM:传统SLAM算法在动态环境或特征稀疏区域(比如空旷的停车场)容易出错。现在,深度学习被用来增强SLAM的鲁棒性,比如更好地识别和剔除动态物体对定位的干扰,或者从点云中学习更稳定的定位特征。
精准障碍物感知与分类
-
核心问题:周围有什么?危险吗?汽车要能准确、可靠地“看到”并识别周围的物体,无论天气好坏(鲁棒)。
-
点云的优势:
- 高精度:LiDAR发出的激光可以精确测量到物体的距离(毫米级距离分辨率),在几十到几百米的范围内,能以厘米级精度检测目标。这意味着汽车能很早发现远处的障碍物,为高速行驶时的避障争取宝贵时间。
- 鲁棒性 (抗干扰能力强):
- 恶劣天气表现好:相比摄像头在雨雪、雾霾天容易“失明”或“看错”,LiDAR(尤其是特定波长的,如1550nm)穿透性更好,仍能提供相对可靠的距离和形状信息。这使得整个多传感器融合系统(摄像头+雷达+LiDAR)在各种天气下都能更好地工作。
- 高维稀疏性的挑战与机遇:点云数据量大,而且点在三维空间中是散开的(高维稀疏性),直接用传统的图像处理方法效果不好。这反而促进了AI领域新算法的发展,比如将点云划分成小格子(Voxel化)再用3D卷积处理,或者直接在原始点上提取特征(Voxel-Free方法,如PointNet系列、Transformer在点云上的应用)。这些方法让AI能更有效地从稀疏点云中“读懂”环境。
-
当下趋势:
- 4D LiDAR/成像雷达:除了X,Y,Z坐标和反射强度,新型LiDAR开始能直接输出每个点的速度信息(第四维度),这对于区分动态和静态物体、预测物体轨迹非常有帮助,简化了感知算法。
- AI大模型在点云理解上的突破:类似于自然语言处理和图像识别领域的大模型,针对点云的预训练大模型也开始出现,它们能更好地理解点云的上下文关系,提升目标检测、场景分割的准确性和泛化能力。
-
高精度三维形态重建: 能够精确识别各种静态和动态障碍物,包括车辆、行人、骑行者、路缘石(可分辨数厘米的高度差)、坑洼,甚至小型杂物。
-
恶劣天气下的鲁棒性: 相比摄像头,LiDAR在雨、雪、雾等天气条件下受影响较小,尤其1550nm波长的LiDAR在穿透性方面表现更优,能有效穿透雨幕、雾气识别前方车辆轮廓。
-
实时动态目标跟踪: 结合时间戳信息,可以对动态障碍物的运动轨迹进行精确跟踪和速度估计。
-
案例: 先进的自动驾驶系统(如Waymo Driver, Cruise AV)的感知模块严重依赖LiDAR点云数据,能在复杂城市场景中快速识别并响应各类交通参与者,例如在隧道口或恶劣光照条件下,LiDAR往往比摄像头更快捕捉到静止或缓慢移动的异常障碍物。
高精度地图构建与更新 (HD Mapping)
- 厘米级三维场景重建: 制作包含车道线、路标、护栏、交通信号灯、建筑物立面等丰富几何与语义信息的高精度地图,其绝对精度通常优于10厘米。
- 道路特征精确记录: 详细记录每个交通标志、标线、龙门架等的三维坐标和属性。
- 应对环境变化: 通过分析路沿高度差、植被边缘等稳定特征,即使在车道线被积雪覆盖或磨损严重的情况下,也能推断车道位置。高精度地图的实时更新也依赖于车载传感器收集的点云数据。
厘米级高精度定位
- 点云匹配定位 (Scan Matching): 将实时获取的LiDAR点云与预先构建的高精度地图进行匹配(如ICP算法及其变种、NDT匹配),实现车辆在地图中的精确姿态(位置和朝向)估计。
- GNSS信号缺失下的补充: 在GPS/GNSS信号受遮挡或干扰的区域(如城市峡谷、地下隧道、停车场),点云定位是实现连续、可靠高精度定位的关键技术,定位误差可控制在厘米级别(如一个茶杯直径)。
行为预测与危险评估
- 动态目标轨迹分析: 通过分析行人和车辆等交通参与者的连续点云帧,提取其运动轨迹、速度、加速度等信息。
- 意图识别与轨迹预测: 结合AI算法(如循环神经网络RNN、长短期记忆网络LSTM、Transformer等),预测目标未来数秒内的可能行为轨迹,例如预测非机动车(如外卖电动车)的突然变道、行人横穿马路等高风险行为。
- 碰撞风险评估: 基于预测轨迹和车辆自身规划路径,进行碰撞风险评估,为规避动作提供充足的提前量(例如提前3-5秒预警)。
技术突破关键点
点云技术在实际大规模应用中还面临一些困难。
| 类型 | 问题说明 |
|---|---|
| 数据量大 | 每秒上百万点,存储/传输/计算压力极大 |
| 实时处理难 | ICP等算法复杂,不能保证高速处理,需要借助GPU与稀疏结构 |
| 硬件昂贵 | 高分辨率激光雷达价格高,量产成本高 |
| 环境干扰 | 强反光/雨雪/尘土会导致遮挡或噪声,需额外滤波和补全算法 |
- 具体挑战:
- 数据量巨大:一次扫描就产生几百万甚至上千万个点,存起来占空间,传起来费带宽,实时处理起来对车载电脑的算力(车载计算资源)要求极高。
- 算法复杂且计算量大:像前面提到的ICP配准,还有识别每个点属于什么物体(语义分割)、跟踪移动物体(目标跟踪)等算法,都很复杂,需要高性能硬件(如GPU)加速才能实时运行。
- 硬件成本:高性能的LiDAR(特别是线束多、看得远的)以前非常贵,几万到几十万人民币,这限制了它在普通家用车上的普及。
- 环境干扰:遇到强反射表面(比如镜面玻璃)、雨雪覆盖、尘埃大的时候,点云数据可能会产生很多噪点,或者有些地方扫描不到(遮挡),这给后续的滤波和数据补全增加了难度。
数据处理与AI算法革新
- 高效点云处理算法:
- 体素化 (Voxelization): 将无序、非结构化的点云数据转换为规则的三维体素网格,便于使用卷积神经网络(CNN)等进行高效处理,可将原始点云的处理效率提升数十倍。
- 基于PointNet/PointNet++及后续网络: 发展出直接处理原始点云的深度学习架构,如PointNet、PointNet++、Point Transformer、KPConv等,在3D目标检测与分割任务上取得了显著进展。
- 实时处理能力: 最新的算法结合硬件加速(如GPU、专用AI芯片),能够在几十毫秒内完成对数百万点云的语义分割、目标检测和跟踪,满足自动驾驶实时性要求(例如,0.05秒内处理百万级点云,相当于每秒处理20帧高密度点云数据)。
多传感器深度融合 (Sensor Fusion)
- LiDAR + 摄像头 (Camera) + 毫米波雷达 (Radar) + IMU协同:
- 前融合 (Early Fusion) vs. 后融合 (Late Fusion) vs. 深度融合 (Deep Fusion): 深度融合策略在原始数据或特征层面进行信息交互,能更充分发挥各传感器优势。例如,将点云的精确三维几何信息与摄像头的丰富纹理和颜色信息在神经网络中间层进行融合。
- 优势互补:
- LiDAR: 精确测距、3D结构。
- 摄像头: 颜色识别、纹理细节、交通标志识别、交通信号灯状态。
- 毫米波雷达: 测速精准、恶劣天气穿透性强(但角分辨率较低)。
- IMU (惯性测量单元): 提供高频的车辆姿态和运动信息,辅助运动补偿和定位。
- 典型场景: 在大雾天气,LiDAR(尤其是1550nm)提供主要测距和轮廓,摄像头辅助识别目标颜色和类别(在能见度允许范围内),毫米波雷达确认目标速度和存在,IMU提供车辆自身运动状态,融合后实现更鲁棒的环境感知。
成本控制与小型化集成
- 固态LiDAR (Solid-State LiDAR) 的崛起:
- 技术路径: MEMS(微机电系统)、OPA(光学相控阵)、Flash LiDAR等技术路径,取代了传统的机械旋转部件,提高了可靠性、降低了成本和体积。
- 价格大幅下降: 高性能车载LiDAR的价格已从数年前的数万乃至数十万美元,下降到数千美元甚至数百美元区间(例如,部分国产高性能LiDAR价格已降至8000元人民币以下,甚至更低)。
- 小型化与易集成: 体积大幅缩小,部分产品已接近车载摄像头大小,更易于集成到车身设计中,实现美观与性能的平衡。
未来突破方向
点云虽强,但也“贵、重、慢”,技术瓶颈主要是算力、存储和硬件成本。
| 趋势方向 | 内容说明 |
|---|---|
| 数据压缩优化 | 深度学习方法对点云压缩/稀疏化,让传输和存储压力下降 |
| 多传感器融合 | 点云 + 图像 + 雷达,互补性强,提升整体识别/定位的准确性 |
| 新型硬件 | 固态/Flash激光雷达:体积小、成本低,利于量产车型普及 |
| 车路协同(V2X) | 点云数据通过车-车/车-路网络共享,构建更大范围的三维认知平台 |
| 智能边缘计算 | 点云在本地边缘设备快速预处理,减少云端负担,提升实时响应能力 |
-
AI赋能数据处理:
- 智能压缩与编码:用深度学习算法来压缩点云数据,减少存储和传输压力,同时尽量保留重要信息。点云稀疏化和分层编码(先传粗略轮廓,再补细节)是研究热点。
- 端云协同:一部分计算在车端(边缘计算)完成,保证实时性;一部分复杂计算或模型训练放到云端,分担车载压力。
-
多传感器深度融合:这不是简单地把LiDAR、摄像头、毫米波雷达的数据拿过来分别处理再汇总,而是更早地在数据层面或特征层面进行深度融合。比如,用点云的精确3D位置信息来指导摄像头图像的分析,或者反过来用图像的颜色纹理信息来帮助识别点云中的物体。目标是1+1+1 > 3。
-
硬件革新——降本增效:
- 固态激光雷达 (Solid-State LiDAR) 和 Flash LiDAR:这些新型LiDAR没有了传统机械旋转部件,体积更小、更可靠、成本也大幅下降。2025年,我们已经看到越来越多中端车型开始标配或选配固态LiDAR,价格也从几年前的“天价”降到了几千元人民币的水平,甚至更低。
- 芯片化与集成化:LiDAR的核心部件正在走向芯片化,进一步缩小体积和功耗。
-
车路协同 (V2X) 与网络化感知:
- 通过V2X(车与万物互联)技术,路边的传感器(比如安装在红绿灯杆上的LiDAR)可以把“上帝视角”的感知信息共享给车辆,弥补单车感知的盲区。
- 车辆之间也可以共享点云数据,比如A车看到了B车因为遮挡看不到的危险,可以提前预警。这能构建一个更大范围、更可靠的实时3D环境感知平台,是实现L4/L5高级别自动驾驶的关键。
- 路侧LiDAR网络: 在交叉路口、事故多发路段等关键位置部署路侧LiDAR,形成覆盖范围更广的“上帝视角”感知网络。
- 信息共享与协同感知: 路侧LiDAR感知到的信息(如盲区内的车辆、行人)通过V2X通信(如5G-V2X)实时共享给附近车辆,弥补单车智能的感知局限,提升交通安全和效率。
- 边缘计算赋能: 结合边缘计算平台处理路侧LiDAR数据,降低时延,快速生成可用的环境信息。
-
极端天气与全天候感知增强:
- 长波长LiDAR: 进一步研发和应用1550nm甚至更长波长的LiDAR,利用其在水汽吸收窗口的特性,增强在浓雾、沙尘暴等极端天气下的穿透能力和探测距离。
- 智能波形处理: 通过分析LiDAR回波的完整波形数据(Full Waveform Analysis),而不仅仅是峰值点,提取更多关于目标物和介质的信息,提升抗干扰能力。
-
动态自适应分辨率与ROI扫描:
- 智能调节扫描策略: 根据驾驶场景和关注区域(Region of Interest, ROI),动态调整LiDAR的扫描密度和帧率。例如,在高速公路远距离感知时采用较低角分辨率以保证探测距离,在城市复杂路口近距离感知时则提高角分辨率以获取更丰富的细节。近处实现毫米级到厘米级精度,远处保证关键目标探测。
- 感兴趣区域聚焦: 将更多扫描资源集中到关键区域,如前方车辆、行人密集区等。
-
4D LiDAR (点云+速度信息):
- 部分先进LiDAR已能直接输出每个点的瞬时速度信息(基于多普勒效应或多脉冲相干处理),形成4D点云。这能极大提升动态物体跟踪的准确性和响应速度,简化后续处理流程。
-
AI赋能的点云压缩与重建:
- 利用深度学习模型对海量点云数据进行高效压缩,以降低存储和传输带宽需求。
- 发展基于AI的点云上采样和补全技术,从稀疏点云中恢复更稠密、完整的三维场景。
现实影响力: 某L4级自动驾驶测试车在夜间暴雨条件下,依靠高性能LiDAR系统,在200米外成功识别出因事故侧翻货车散落在路面上的轮胎等障碍物,并提前约40-50米开始执行平稳的变道避让操作。相比之下,人类驾驶员在该条件下可能需要更近的距离(例如80米左右)才能清晰辨识危险并做出反应。这充分展现了先进点云技术为自动驾驶带来的革命性安全提升。
一、BEV感知的核心思想:上帝视角的3D理解
1. BEV空间本质
- 物理映射:将2D图像像素(如1920×1080)转换为鸟瞰视角的3D网格(如200×200×4)
- 网格参数示例:
bev_grid = [200, 200, 4] # 对应物理空间通常为50m×50m×高度(z轴4个特征通道) voxel_size = 0.25m # 每个网格代表的实际距离 - 优势:统一多相机视角,消除透视畸变(如远处物体像素小的问题)
2. 2D→3D转换的两大流派
| 方法类型 | 代表模型 | 原理 | 优缺点 |
|---|---|---|---|
| 显式深度估计 | BEVDet, BEVDepth | 先预测像素深度→投影到3D空间 | 依赖深度精度,计算量大 |
| 隐式特征编码 | BEVFormer | 通过Attention机制学习2D-3D映射关系 | 无需显式深度,泛化性强 |
BEVFormer的隐式映射:
使用可学习参数作为BEV Query,通过Cross-Attention聚合多视角特征,公式简化:
BEVout=Attention(Qbev,Kimg,Vimg)BEV_{out} = \text{Attention}(Q_{bev}, K_{img}, V_{img})BEVout=Attention(Qbev,Kimg,Vimg)
二、BEVFormer核心技术拆解
1. 时空融合机制
- Spatial Attention的Q/K/V:
Q:BEV Query(200×200网格位置编码)K/V:多相机图像特征(提取物体的边缘/纹理等)
- Temporal Attention的Q/K/V:
Q:当前帧BEV QueryK/V:历史帧BEV特征(存储运动轨迹信息)
2. BEVDet4D的Grid Sample Warp
- 核心步骤:
- 坐标变换:根据相机内外参计算图像像素→BEV网格的映射矩阵
- 双线性插值:对非整数坐标位置进行插值采样(PyTorch示例):
warped_feat = F.grid_sample( input=img_feature, grid=bev_grid_coords, # 计算出的采样网格 mode='bilinear' )
- 作用:解决多视角图像在BEV空间的对齐问题(如相邻相机重叠区域)
三、3D目标检测关键技术
1. 纯视觉 vs 激光雷达方案
| 对比项 | 纯视觉BEV | 激光雷达方案 |
|---|---|---|
| 输入数据 | 多视角RGB图像 | 点云+反射强度(intensity) |
| 标注基准 | 点云投影到图像 | 原始点云 |
| 距离限制 | 50m内可靠(光线依赖) | 100m+(受雷达性能限制) |
| 多雷达适配 | - | 需强度校正算法 |
强度校正:不同雷达的强度差异通过标定文件转换,公式:
Icorrected=a⋅Iraw+b(a,b为标定系数)I_{corrected} = a \cdot I_{raw} + b \quad (a,b \text{为标定系数})Icorrected=a⋅Iraw+b(a,b为标定系数)
2. 远距离检测优化方案
- 数据增强:合成远处小物体(缩放+模糊模拟大气散射)
- 多尺度BEV网格:近处0.1m/格,远处0.5m/格(节省计算资源)
- 时序融合:BEVDet4D利用连续帧信息提升远处目标稳定性
四、轻量化部署实战方案
1. 轻量模型架构
| 模型 | 推理速度(2080Ti) | 参数量 | 核心优化点 |
|---|---|---|---|
| Fast-BEV | 25 FPS | 4.2M | 无Attention,卷积替代 |
| BEVDepth-TRT | 50 FPS(Orin-X) | 18.6M | TensorRT量化+层融合 |
2. 部署优化技巧
- BEV特征压缩:PCA降维(4通道→2通道,精度损失<1%)
- 模型蒸馏:用大模型(BEVFormer)指导轻量模型(Fast-BEV)学习
- 硬件加速:
- 使用INT8量化(Tesla T4实测加速3倍)
- 利用CUDA Core并行计算Grid Sample
五、行业落地挑战与突破
1. 量产方案对比
| 厂商 | 技术路线 | 实测指标(城市NOA) |
|---|---|---|
| 小鹏 | BEV+激光雷达融合 | 100m内检出率99.2% |
| 地平线 | 纯视觉BEVDepth | 50m内误检率<0.1次/公里 |
| 比亚迪 | Transformer+RNN | 雨天检出率下降15% |
2. 关键突破方向
- 遮挡处理:
BEV-Lane系列通过空间注意力掩码恢复被遮挡车道线 - 多模态融合:
BEVFusion将激光雷达点云投影为BEV伪图像,与视觉BEV特征级融合 - Sim2Real迁移:
用CARLA仿真生成极端场景BEV数据(如暴雨/强光)
六、前沿技术演进
- 4D-BEV:
引入高度维度(z轴),支持立体障碍物检测(如天桥、隧道) - 神经渲染BEV:
用NeRF生成逼真BEV视角,解决数据稀缺问题 - BEV+Occupancy网络:
联合输出障碍物+可行驶区域(如Tesla Occupancy Networks)
趋势:BEV正从感知模块升级为“统一表征空间”,融合预测/规划模块(如UniAD框架)
SkySense V2 - 遥感领域的“全能选手”
你用不同的相机(普通相机、热成像仪、X光机)拍同一个场景,每台相机看到的信息都不一样。遥感卫星也是这样,它用不同类型的“相机”(光学相机、多光谱相机、雷达)从天上拍地球,每种相机(我们叫模态)提供的信息都很有价值,比如看清物体(光学)、识别植物健康(多光谱)、穿透云层看地形(雷达)。
之前的问题:
科学家们通常给每种卫星“相机”都单独训练一个专门的AI模型(就像给每种相机配一个专属翻译)。这样做有两个大麻烦:
- 费钱费时: 训练和保存三个大模型需要巨大的计算资源和存储空间。
- 不够“聪明”: 现有的自我学习方法(不用人工标注数据的训练方式)不太擅长处理卫星图片里经常出现的复杂情况——一张图里可能同时包含农田、河流、城市等多种东西(多语义)。
SkySense V2 的解决方案:
蚂蚁集团和武汉大学的研究人员搞了个厉害的“全能选手”——SkySense V2。它的目标是用一个核心AI模型,就能高效理解上面提到的三种主要卫星数据(高分辨率光学、多光谱、雷达)。
怎么做到的?关键创新点:
-
统一大脑(Unified Backbone):
- 不再用三个独立的模型,而是用一个强大的Transformer模型(类似现在大语言模型的核心)作为公共处理中心。
- 好处: 模型体积大大缩小!参数从之前的12.6亿减少到6.65亿,省了近一半空间,运行效率更高。
-
自适应分辨率处理(Adaptive Patch Merging - APM):
- 不同卫星拍的照片清晰度不一样。高分辨率图细节超多(像高清照片),雷达和多光谱图相对模糊些(像缩略图)。
- APM模块让模型能自动适应不同清晰度的输入。处理高清图时多压缩点信息,处理模糊图时少压缩点,保证最后的信息在一个“频道”上,方便融合理解。
-
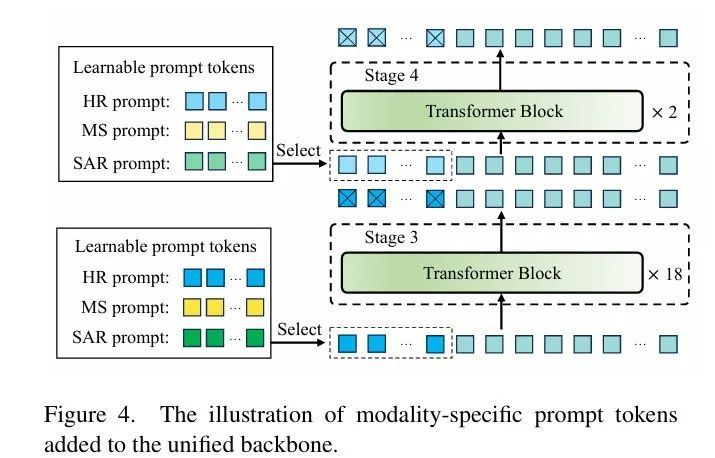
模态专属“小纸条”(Modality-specific Prompt Tokens):
- 用一个大脑处理三种数据,会不会搞混?比如把雷达信号误当成光学特征?
- 他们给每种数据模态(光学、多光谱、雷达)准备了一些特殊的、可学习的“小纸条”(Prompt Token)。在处理数据时,把这些“小纸条”和图像信息一起输入给模型,相当于告诉模型:“嘿,现在处理的是雷达数据哦!”或“注意,这是多光谱数据!”。这样模型就能更好地记住并区分不同数据的特点。
-
专家顾问团(Mixture of Experts - MoE):
- 想让模型更聪明,通常要把它变大,但又会变慢变贵。MoE是个巧妙的办法。
- 他们在模型后期引入了一组“专家”。每次处理一个具体问题时,模型只会激活最相关的少数几个“专家”来帮忙(稀疏激活)。这样既增加了模型的“知识容量”和灵活性,又不至于让每次计算都变得超级慢和贵。
-
更聪明的自学方法(QSACL - Query-based Semantic Aggregation Contrastive Learning):
- 针对卫星图“一个画面包含多种东西”的自学难题,他们发明了新方法QSACL。
- 模型自己学习提出几个关键“问题”(Query),这些问题会引导模型去关注图像中不同的语义区域(比如这片是农田,那片是水体),并把同一区域在不同视角或变换下的特征聚在一起学,把不同区域的特征分开学。
- 这样模型自学时就更能抓住图像里不同部分的本质,避免混淆。
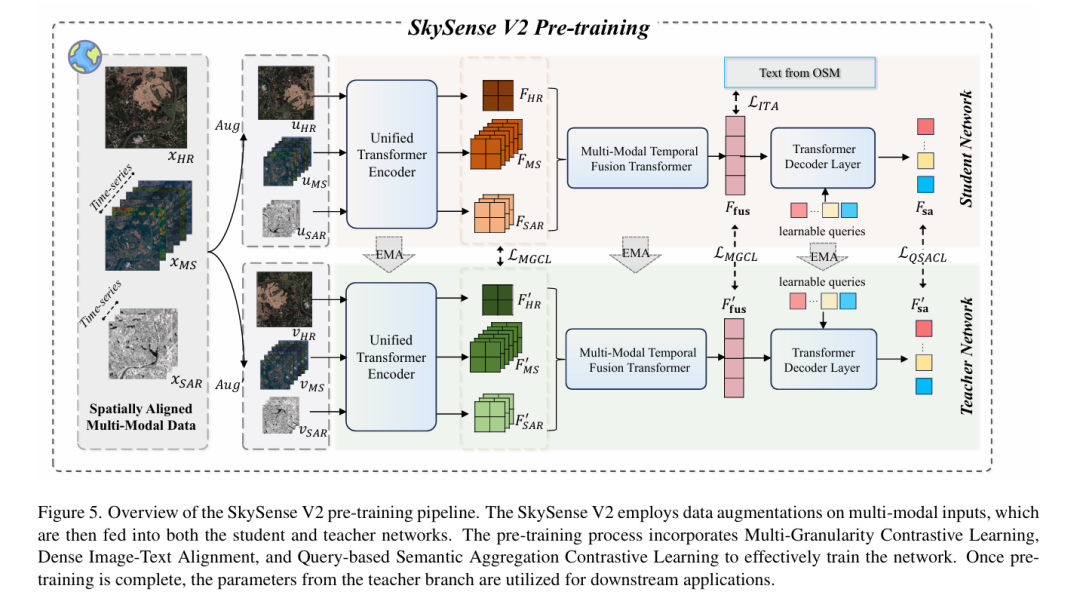
强大的数据和灵活的应用:
- 训练数据海量: 用了自己构建的超大数据集,包含约2100万组来自全球的、配准好的三模态(光学、多光谱、雷达)卫星图像样本。
- 万能适配器: 预训练好的SkySense V2核心模型,可以灵活地接入不同的“小模块”,去完成各种各样的下游任务:
- 看单张图做什么(场景分类、目标检测)?
- 看一个地方随时间变化的图(变化检测)?
- 融合多种卫星数据一起看(多源分类/分割)? 都能搞定!
效果如何?
在多个遥感任务和数据集上的实验表明,SkySense V2 这个“全能选手”不仅比之前用多个独立模型的方案更小更省资源,而且在性能上全面超越了现有的其他方法,展现出强大的泛化能力和任务适应性。
重要链接:
- 论文原文(arXiv): https://arxiv.org/abs/2507.13812
- 会议信息: 发表于 ICCV 2025 (International Conference on Computer Vision 2025)
SkySense V2 是一个突破性的多模态遥感基础模型。它通过创新的统一架构、自适应处理、模态提示、MoE专家系统以及先进的对比学习方法,高效地解决了多模态遥感数据处理中的参数冗余、特征混淆和复杂语义理解等关键挑战,为实现更高效、更通用的卫星图像智能解译打下了坚实基础
- 关键误区:车企需注意,单纯安装激光雷达≠车辆能准确感知环境,其性能受多重参数制约。
-
距离(Range)
- 定义:最大探测距离决定提前发现目标的能力(如200米外障碍物)。
- 制约:高功率需求受限于眼安全规范(1550nm波长可突破限制但成本更高)。
-
分辨率(Resolution)
- 角度分辨率:水平/垂直角分辨率影响细节识别能力(例如分辨40米外的行人)。
- 点云密度:由点云率(PPS)、通道数、扫描频率共同决定(计算公式详见第四模块)。
-
鲁棒性(Robustness)
- 环境适应性:需在雨雾、强光、污损等复杂条件下保持可靠性。
- 工程基础:依赖IP防护等级(如IP67/69K)、温度抗性及振动稳定性(通过汽车级测试)。
| 参数类别 | 核心参数 | 实际影响 |
|---|---|---|
| 物理与测量参数 | 最大/最小测距、距离精度、反射率敏感度、波长(905nm/1550nm)、多回波能力 | 决定基础探测能力(如1550nm更适远距) |
| 点云参数 | 点云率(PPS)、水平/垂直角分辨率、通道数、视场角(FOV)、扫描模式(旋转/固态) | 影响目标细节还原(高PPS需匹配高算力) |
| 系统工程参数 | 时间同步精度、延迟抖动、温度适应性、功耗、接口兼容性(Ethernet/CAN) | 决定系统集成难度与稳定性 |
| 环境适应性参数 | 雨雾穿透能力、低反射材料(深色衣物)探测概率、多传感器融合兼容性 | 应对真实路况挑战的关键 |
-
典型案例:点云密度计算
假设激光雷达参数:- 点云率=1.2Mpps,通道数=64,扫描频率=10Hz
- 计算过程:
- 每转点数 = 1,200,000 × (1/10) = 120,000点/转
- 每通道点数 = 120,000 ÷ 64 ≈ 1,875点
- 水平角分辨率 = 360° ÷ 1,875 ≈ 0.192°
- 实际影响:在50米处,相邻点横向间距=50×tan(0.192°)≈0.168米,影响小目标识别精度。
-
关键权衡原则:
- 提高探测距离 → 需更高功率 → 成本↑或受安全限制
- 增加角分辨率 → 需牺牲扫描频率或提高PPS → 算力/带宽需求↑
- 追求高PPS → 需匹配高效算法,否则导致数据拥堵
-
破除参数迷信
- 点云率≠性能:需关注有效点密度(实际落于目标表面的点数),避免“数据洪水”淹没系统。
- “最大探测距离”陷阱:要求厂商提供不同反射率/天气下的检测概率曲线(非实验室单值)。
-
场景化测试优先
- 高速场景:聚焦远距(>200米)精度与低延迟(时间同步误差<10毫秒)。
- 城市/泊车场景:重视近距盲区、垂直分辨率(识别低矮障碍物)。
-
软件与工程支持
- 必备能力:点云去畸变、滤雨雪算法、时间同步至IMU/里程计。
- 验收关键:索要原始点云样本(含极端天气数据),在自有感知算法中实测。
-
量产一致性保障
- 要求厂商提供:
- 单元一致性报告(unit-to-unit variation)
- 自动化校准流程
- OTA更新与10年以上备件供应承诺
- 要求厂商提供:

立足具身智能前沿赛道,致力于搭建全球化、开源化、全栈式技术交流与实践共创平台。
更多推荐

 30
30 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)