Boost变换器控制器设计——01:基于输出电压全前馈的电流电压双闭环控制器设计(平均模型法)
本文详细介绍了Boost变换器闭环控制器设计过程。首先通过平均模型法推导开环模型,分析了系统的非线性特性及线性化方法。在电流环设计中,采用PI控制器并引入输出电压全前馈补偿实现解耦控制,通过Bode图验证了参数选择的合理性。电压环设计则基于电流闭环系统,通过调整参数获得理想的相位裕度和穿越频率。Simulink仿真结果验证了双闭环控制系统的优良性能,包括快速动态响应和稳定的稳态特性。文中还提供了M
本文为电力电子装置闭环控制器设计的学习笔记,参考视频:【30】boost变换器等效模型分析+开环控制+仿真验证_哔哩哔哩_bilibili
目录
1. 设计指标

2. 开环模型推导与分析
2.1 平均模型法
2.1.1 非线性模型的近似线性化
在开关变换器中,一般按照开关状态将电路分为几个不用模态。在不同模态中,电路状态量的状态方程又有所不同,且均受到占空比D的影响。
平均模型法建模就是将占空比D近似为固定值,将各个模态的状态量做平均化处理,进而近似将非线性模型线性化。个人认为,其本质是稳定点大信号与扰动小信号的叠加平均,非常接近变换器的实际工况,因此尤其适合用于控制器的设计以及参数整定。
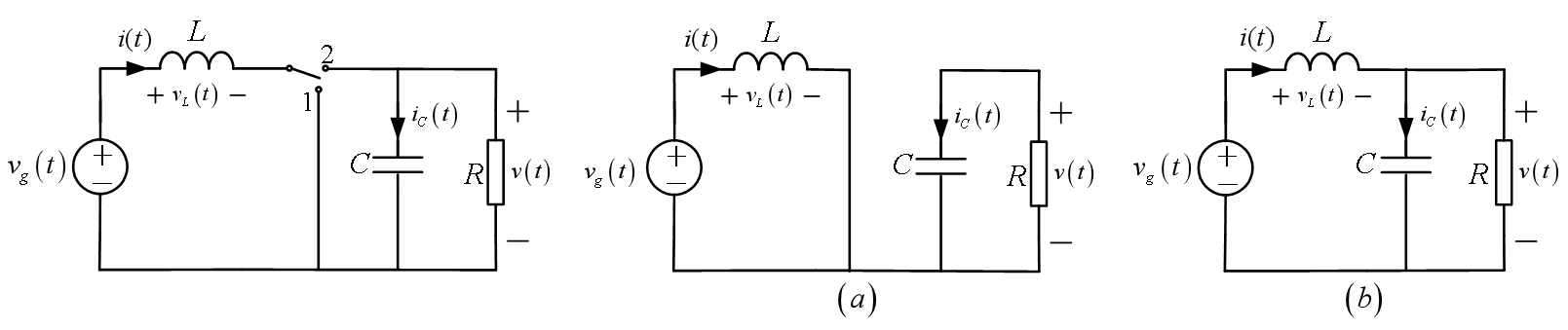
2.1.2 Boost电路的平均模型
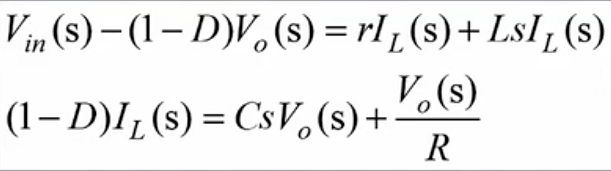
由boost电路工作原理可知,其在CCM下具有上图(a)(b)两种模态,分别对应不同的状态方程。在模态a前乘系数D,模态b前乘系数D‘=1-D,即可得到电路的平均模型,再经拉氏变换可得:
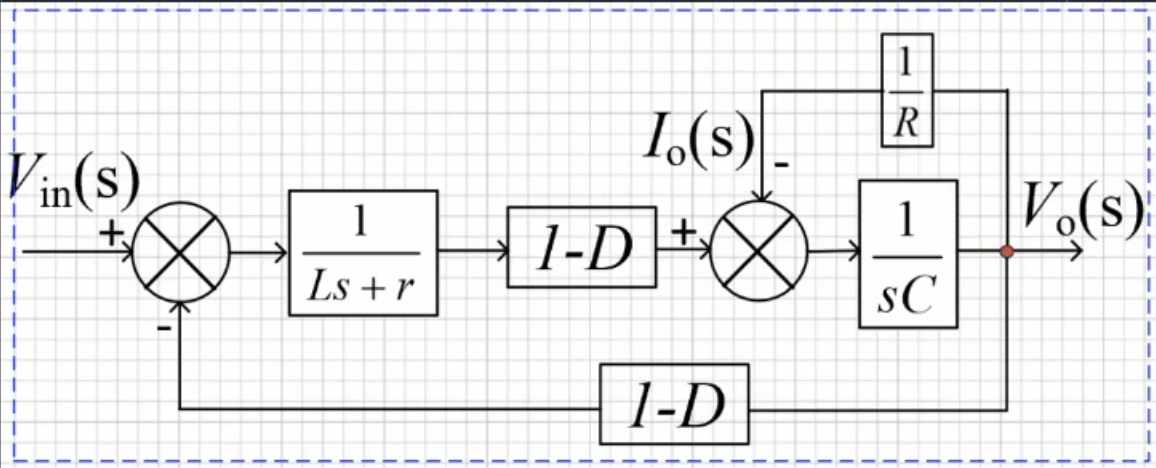
2.2 开环系统建模
由上式可得出Boost电路的平均开环模型框图:
计算其开环传递函数为:
在matlab中绘制bode图,其中各项参数如设计指标中所示,占空比D假设固定为0.75。
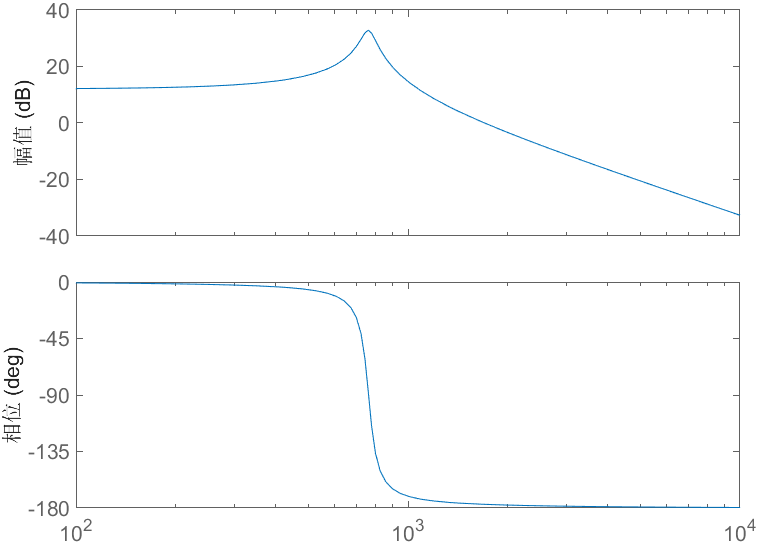
可以看到在开环状态下,系统具有明显的尖峰,且相位裕度较小,需要加以补偿设计。
上图给出了开环系统的单位阶跃响应,如图所示,其输出具有较大的震荡,印证了bode图中的幅值相位关系。
3. 电流环设计分析
3.1 加入电流环后的系统模型
3.1.1 电流内环控制框图
由于控制对象为boost变换器的电感电流,因此可以暂时将输出电压Vo看作扰动输入,可得到以下控制框图:
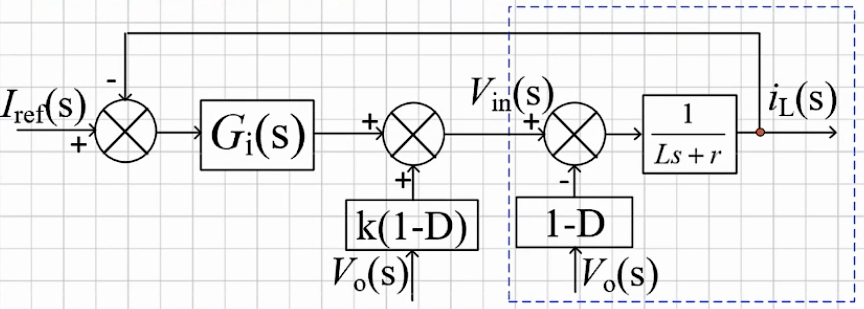
其中,左侧部分为新添加的控制器(其中Gi(s)为PI控制器的传递函数),右侧部分为系统自身模型(Vin到iL的传递函数)。
3.1.2 输出电压全前馈补偿
如上图所示,在此条件下设计电流环控制器时,电感电流与输出电压Vo耦合,不利于参数的整定。因此,在PI控制器输出端引入输出电压前馈,则当k=1时,可消去变量Vo,起到电流电压两个状态量解耦的作用。由此一来,便可以独立设计电流内环与电压外环的参数。此种情况成为输出电压的全前馈。
3.2 电流内环的PI控制器参数整定
设PI控制器的传递函数为,则当k=0时,系统的开环传递函数为:
;闭环传递函数为:
。
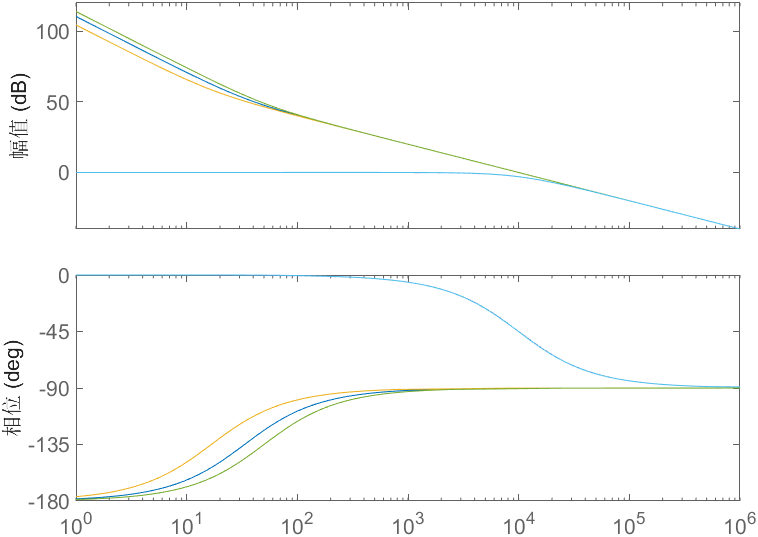
上图给出了单电流环系统开环、闭环bode图与Kii的关系。图中浅蓝色为闭环bode图,其余为开环bode图。可以看出,当Kpi取20,Kii分别取100、200、300时,对闭环性能几乎没有影响。
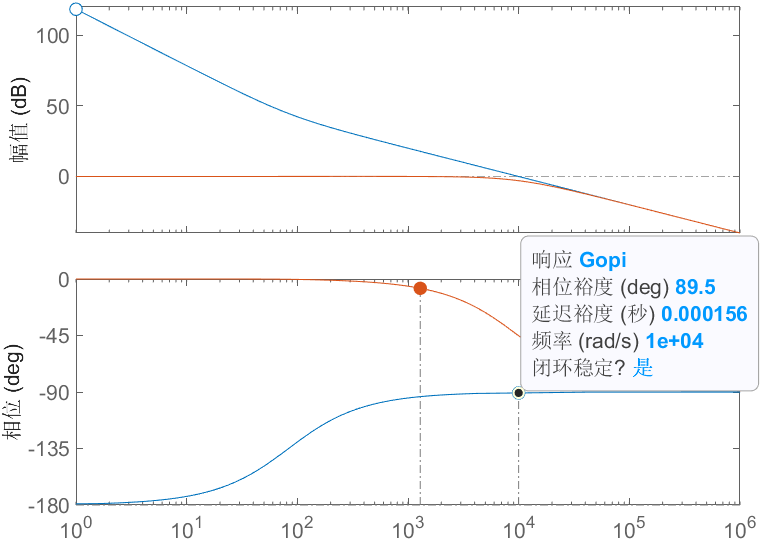
另外,从上图的开环bode图来看,电流环系统的穿越频率在10000rad/s。一般的,为了较快的动态响应同时隔绝开关噪声与谐波,系统穿越频率应设计在开关频率的1/10左右。分析该系统可得,由开关频率16000hz推出穿越角频率应该在2*pi*1600,也就是10000rad/s左右。同时,相位裕度为89.5°。因此,电流环设计满足需求。
4. 电压环设计分析
4.1 加入电压环后的系统模型
下图给出了加入电压外环后的系统模型,如图所示,在实际模型中,左侧方框外的部分为控制器部分,右侧方框中的部分为实际系统模型。而当引入输出电压全前馈后,可以很方便的得到整个系统的开环以及闭环传递函数。
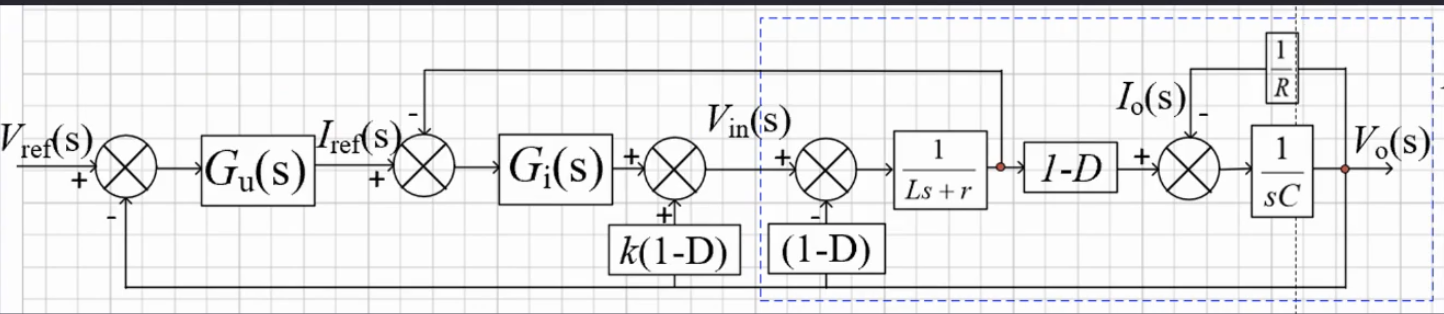
4.2 电压外环的参数整定
整个系统的开环传函求解可分为以下三个部分,即从左到右依次为电压环PI控制器、电流闭环以及系统自身剩余部分。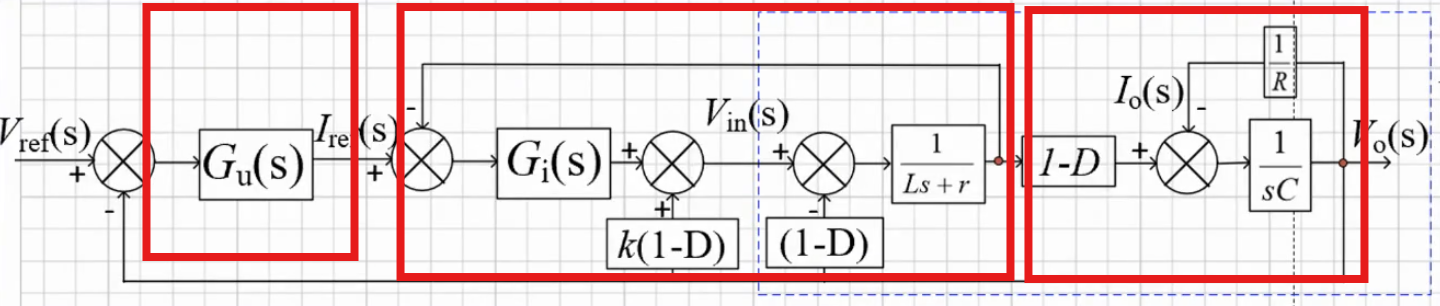
即可得出整个系统的开环传递函数为:
取Kpu=0.1,Kiu=20,可得到整个系统开环与闭环的bode图:
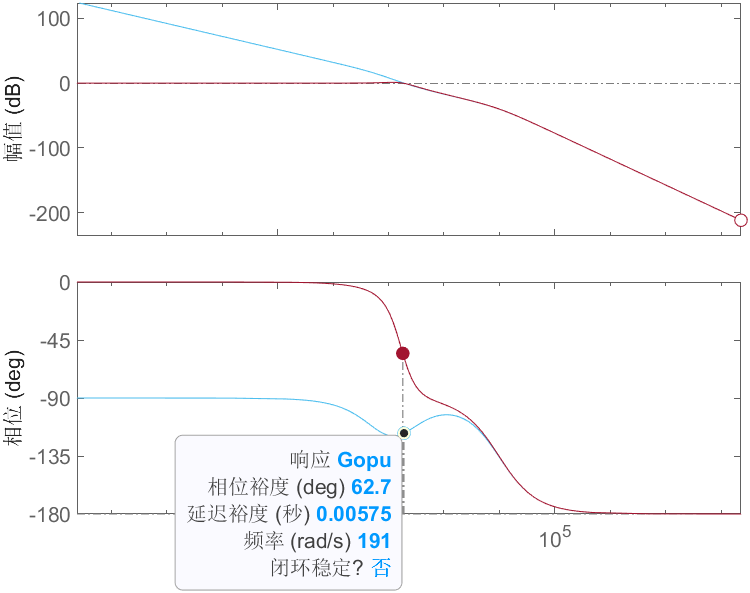
如图,蓝色部分为开环bode图,红色部分为闭环bode图。从开环bode图可以得出,系统的相位裕度为62.7°,且穿越频率为191rad/s,其数值较小。这是因为电流内环已经提供了较大的穿越频率,用来提高系统的响应速度,因此电压外环的穿越频率无需太高。
从闭环bode图来看,其在转折频率出有轻微尖峰,这一点反映出系统在响应单位阶跃信号时会出现一定的超调。
4.3 整个系统的单位阶跃响应
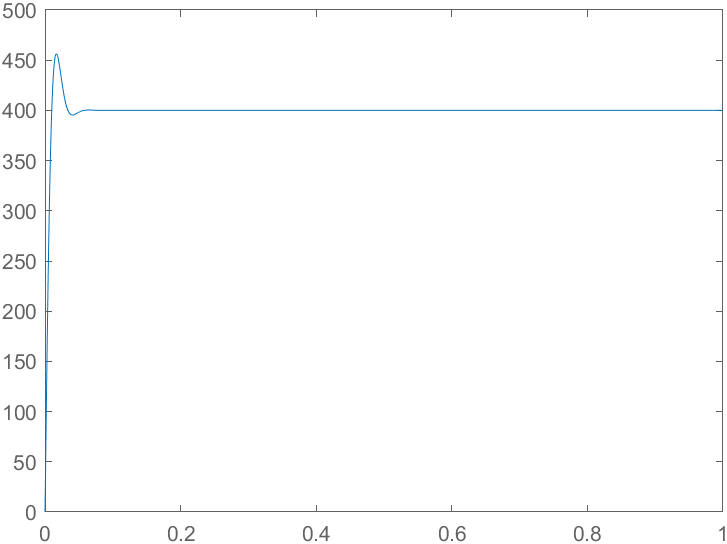
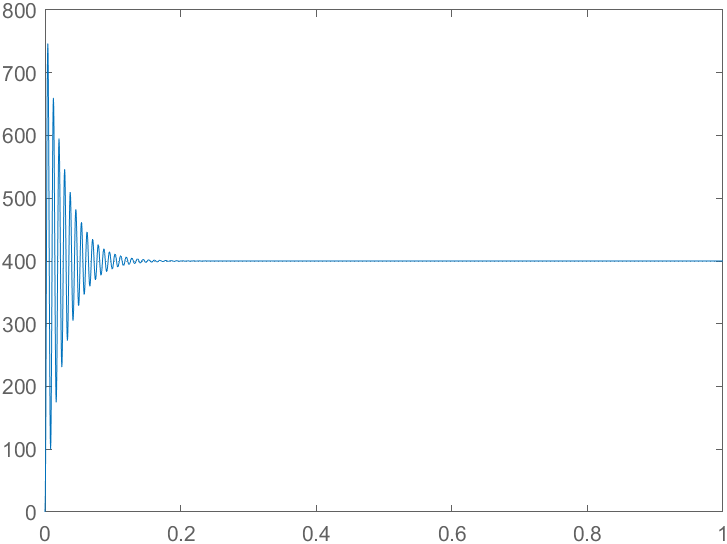
上图给出了整个系统的单位阶跃响应,可以看到,通过电压电流双闭环的补偿,系统具有较好的动态响应以及稳态性能。另外,系统具有较高的超调量,如需减小,可以通过减小Ki来实现。
5. Simulink仿真建模
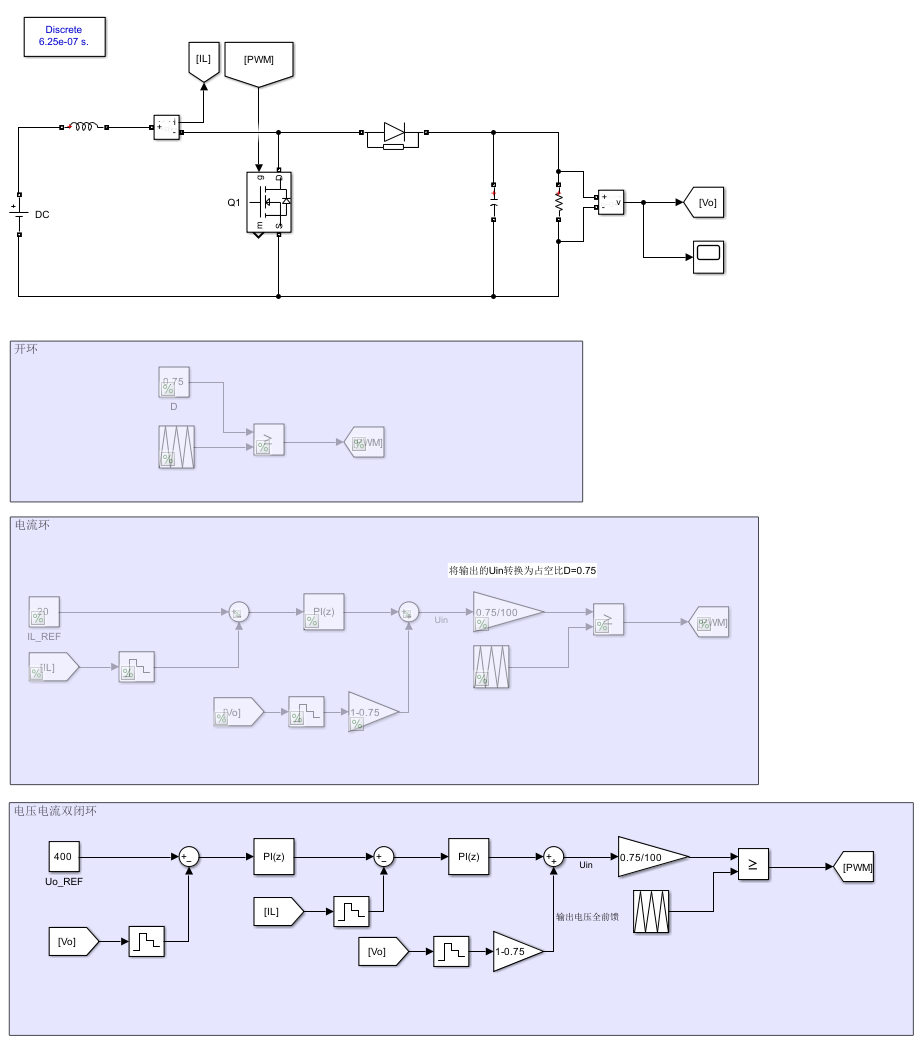
下面给出Simulink仿真的几个关键波形,可对照理论模型进行对比分析。
5.1 开环单位阶跃响应
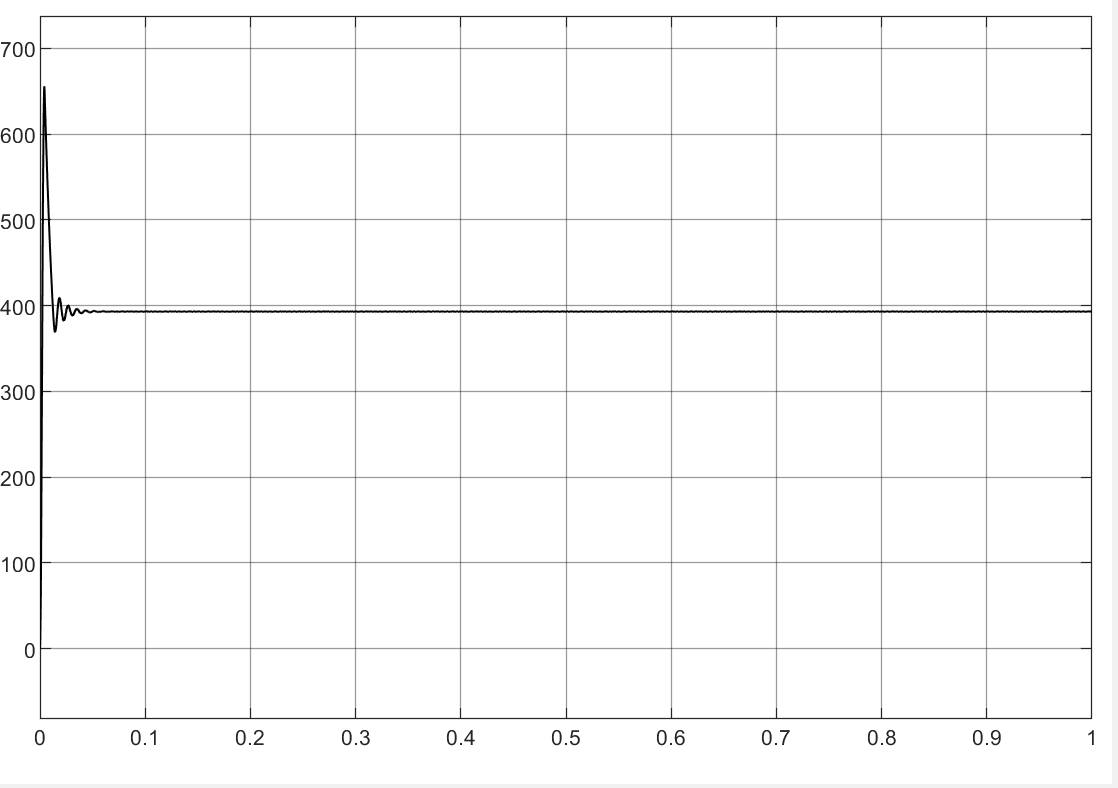
可以看到,其一开始具有较大震荡,且稳态后有一定经常。其原因主要是受到二极管导通压降等因素影响,这些在建模中均被忽略。
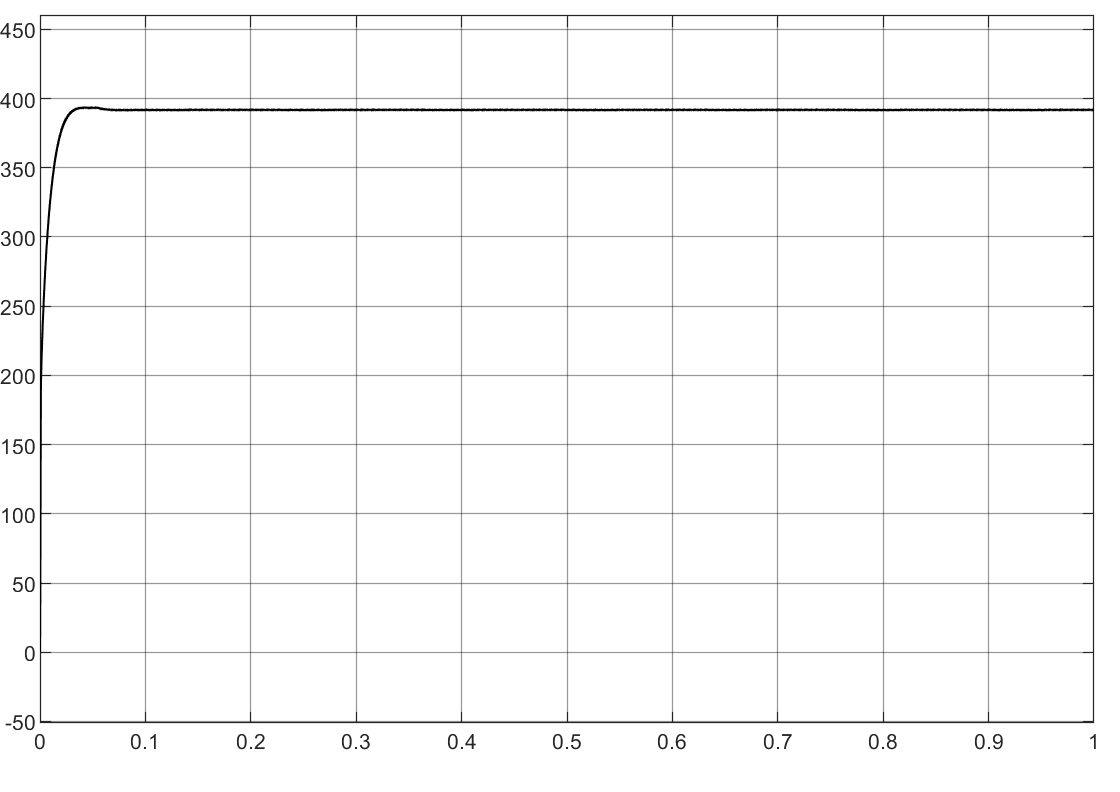
5.2 电流环单位阶跃响应
5.3 电压电流双闭环单位阶跃响应
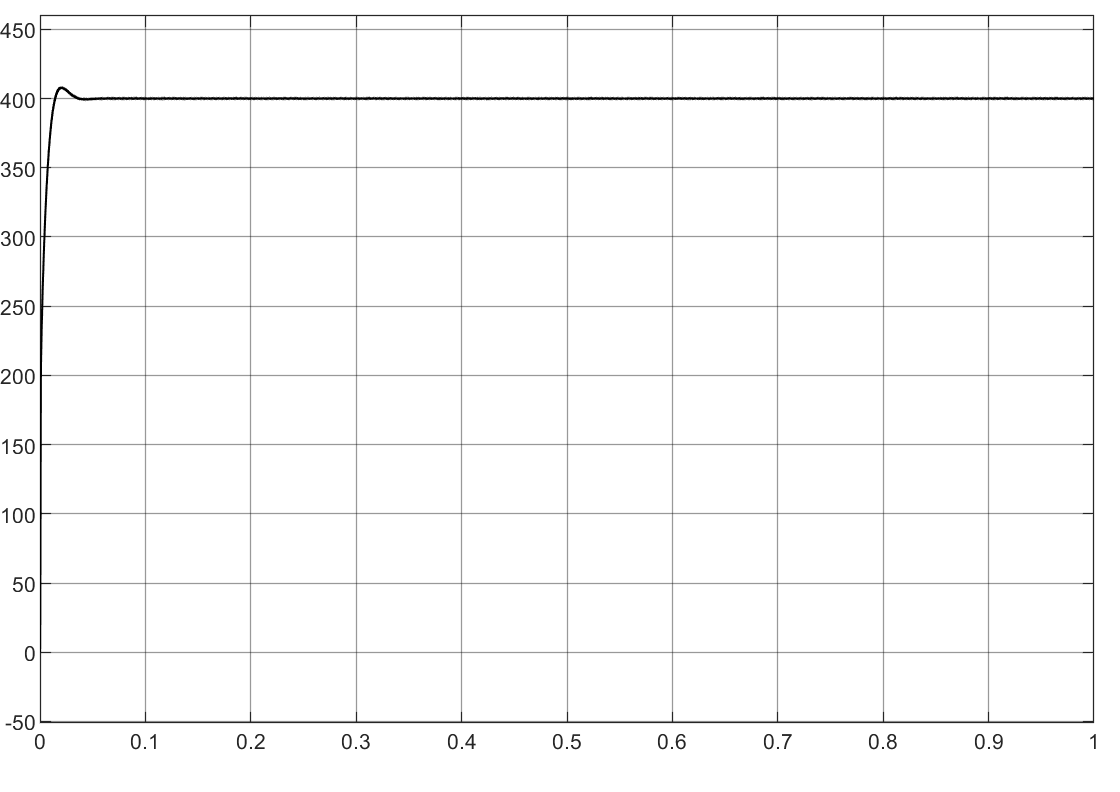
可以看出,双闭环加负载电压全前馈的控制下,系统具有良好的动态以及稳态性能。
6. Matlab代码
%参数设计
C = 0.00018;
L = 0.0006;
r = 0;
R = 80;
D = 0.75;
Vin = 100;
Vo = 400;
fs = 16000;
s = tf('s');
%开环传函
Gs = (1-D)/(L*C*s*s+L/R*s+(s*C+1/R)*r+(1-D)^2);
% bode(Gs);
% hold on
% figure;
% step(Gs*100,1);
% figure;
%设计电流环
Kpi = 6;
Kii = 500;
Gis = (Kpi*s+Kii)/s;
Gopi = Gis/(L*s+r); %电流环开环传函
% bode(Gopi);
% hold on
Gcli = Gopi/(1+Gopi);
% bode(Gcli);
%设计电压环
Kpu = 0.1;
Kiu = 20;
Gus = (Kpu*s+Kiu)/s;
Gopu = Gus*Gcli*(1-D)*R/(s*C*R+1);
Gclu = Gopu/(1+Gopu);
bode(Gopu);
hold on;
bode(Gclu);
figure;
step(Gclu*400,1);
立足具身智能前沿赛道,致力于搭建全球化、开源化、全栈式技术交流与实践共创平台。
更多推荐

 26
26 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)