【自动驾驶】Autoware.Universe 开发概述 ① ( 自动驾驶整体架构 | 车端系统 | 云端系统 | 硬件架构 | 软件架构 | 高精地图 + 定位系统 重要性 | 硬件接入方式 )
一、自动驾驶整体架构1、车端系统2、云端系统3、硬件架构① 硬件接入方式② 硬件接入步骤③ 自动驾驶技术点4、软件架构5、开发方向6、高精地图 + 定位系统 重要性二、Autoware.Universe 开发文档1、Autoware 文档介绍① Autoware Universe 各组件文档② Autoware Core 文档③ Autoware Tools 各组件文档
一、自动驾驶整体架构
1、车端系统
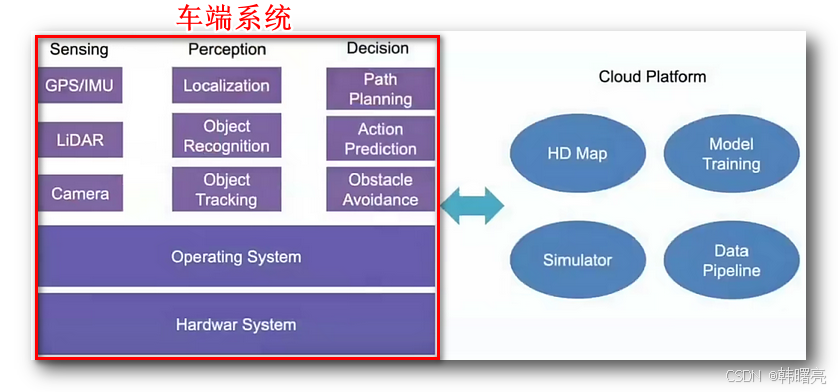
车端系统 :
- 硬件系统 ( Hardwar System ) : 定位模块 、 惯导模块 、 激光雷达 、 毫米波雷达 、 超声波雷达 、 摄像头 、 线控底盘 等 ;
- 操作系统 ( Operating System ) : 开发阶段使用 Ubuntu 操作系统 ;
- 传感器 ( Sensing ) 系统 : 定位模块 ( GPS / IMU ) 、 雷达模块 ( LiDAR : 激光雷达、毫米波雷达、超声波雷达 ) 、 摄像头模块 ;
- 感知 ( Perception ) 系统 : 定位功能 ( Localization ) 、 物体识别 ( Object Recognition ) 、 物体追踪 ( Object Tracking ) ;
- 决策 ( Decision ) 系统 : 路径规划 ( Path Planning ) 、 行为预测 ( Action Prediction ) 、 避障 ( Obstacle Avoidance ) ;
2、云端系统
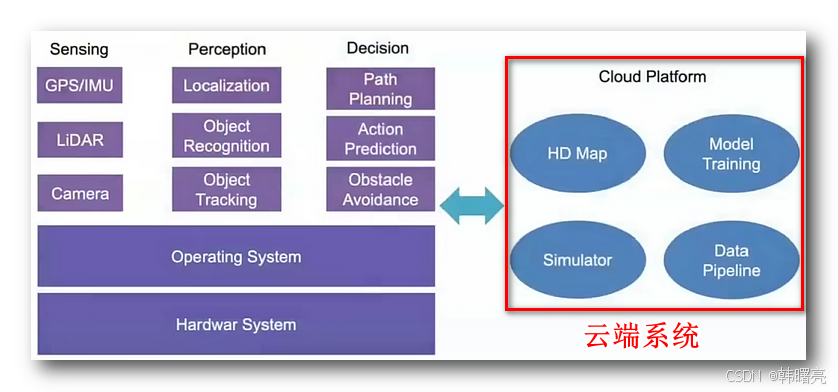
云端系统 : 高精地图 ( HD Map ) 、模型训练 ( Model Training ) 、仿真器 ( Simulator ) 、数据管道 ( Data Pipeline ) ;
小型团队 只需要 关注 高精地图 和 仿真器 即可 ;
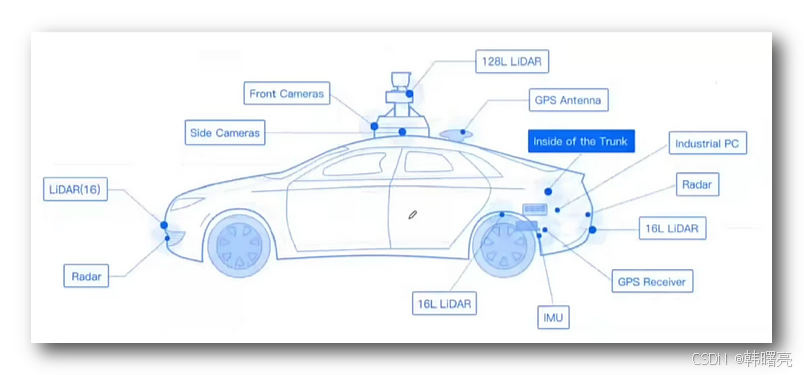
3、硬件架构
自动驾驶 硬件架构 :
- 激光雷达 : 128 线激光雷达 ( 128L LiDAR ) 、16 线激光雷达 ( 16L LIDAR )
- 毫米波雷达 : 毫米波雷达 、 超声波雷达 ( Radar )
- 摄像头 : 前视摄像头 ( Front Cameras ) 、侧视摄像头 ( Side Cameras )
- 定位 : 全球定位系统天线 ( GPS Antenna ) 、全球定位系统接收器 ( GPS Receiver ) 、 惯性测量单元 ( IMU )
- 车载计算单元 : 工业个人计算机 ( Industrial PC )
参考 【自动驾驶】自动驾驶概述 ④ ( 自动驾驶 整体架构 | 车端系统架构 | 云端系统架构 | 自动驾驶硬件概述 | 前视、侧视、环视摄像头 | 激光、毫米波、超声波雷达 ) 二、自动驾驶 硬件概述 博客章节 ;
① 硬件接入方式
所有的硬件 都是通过 Ethernet 网线 或者 USB3.0 与 车载计算单元 连接 , 优先使用 网线 连接 这些硬件 ;
硬件接入的核心逻辑 : 设备硬件 → ROS 2 驱动 → 标准消息(如 PointCloud2、Image、NavSatFix)→ Autoware 感知/定位模块 ;
上述硬件使用的前提 就是 兼容 Autoware , 并提供了 ROS 2 驱动 , 这样就可以搭建 自动驾驶框架 ;
Autoware 文档中 在 https://autowarefoundation.github.io/autoware-documentation/main/reference-hw/ 页面 提供了 参考硬件设计 , 给出了如下硬件的参考设备 , 大部分是国外设备 , 可选择国内同类竞品价格更低 ;
- 自动驾驶专用计算机 AD COMPUTER
- 激光雷达 LiDAR
- 毫米波雷达 LiDAR
- 摄像头 CAMERA
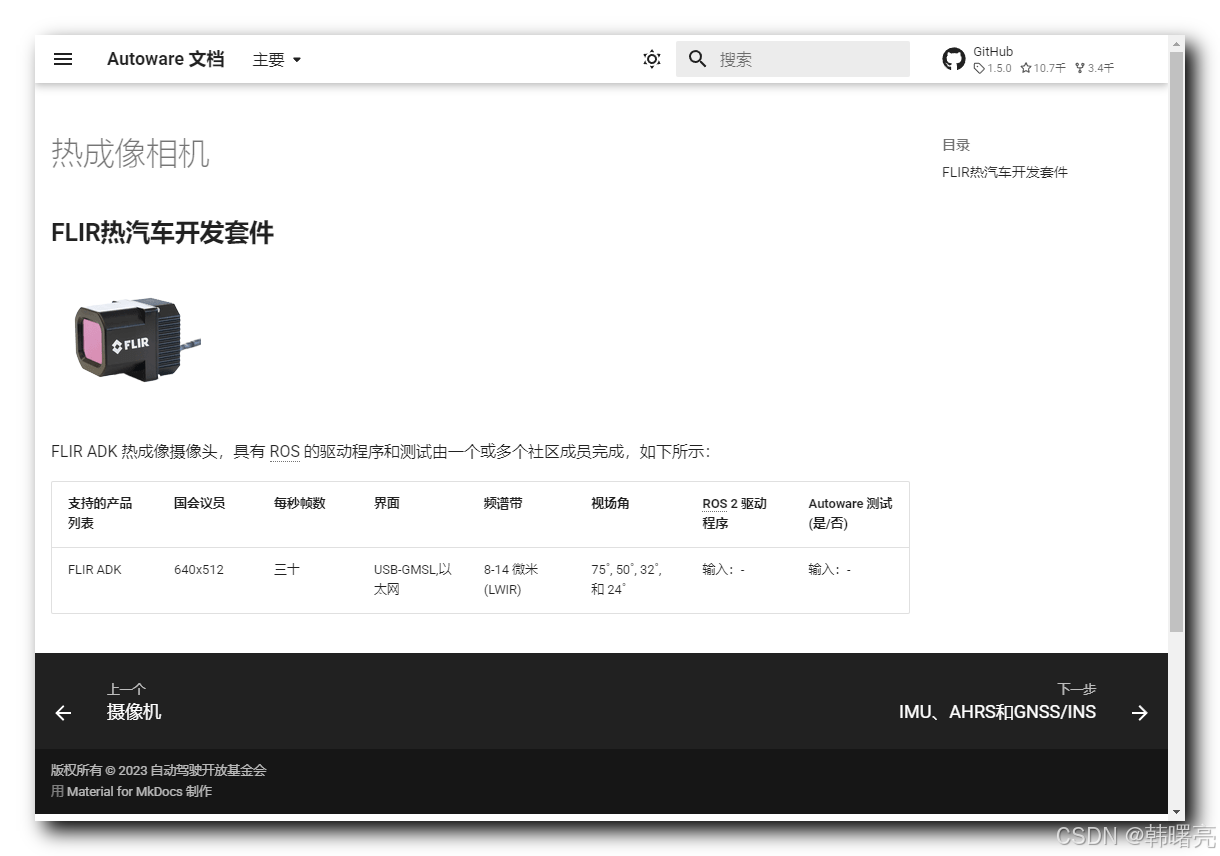
- 热成像摄像头 Thermal CAMERA
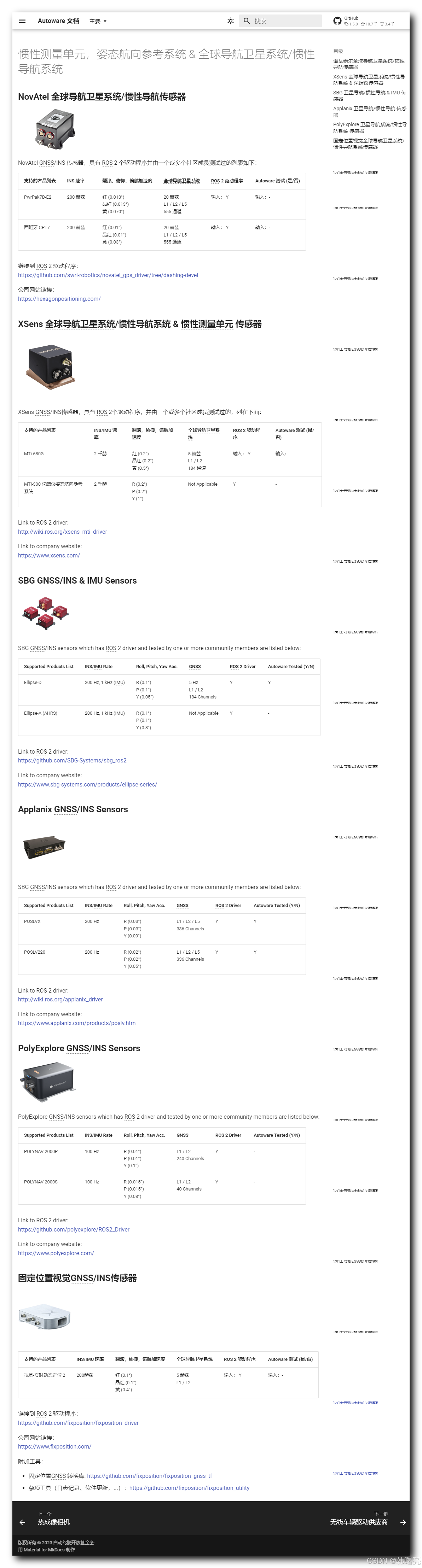
- 定位 / 惯导 IMU, AHRS & GNSS/INS
- 线控控制器 Vehicle Drive By Wire Suppliers
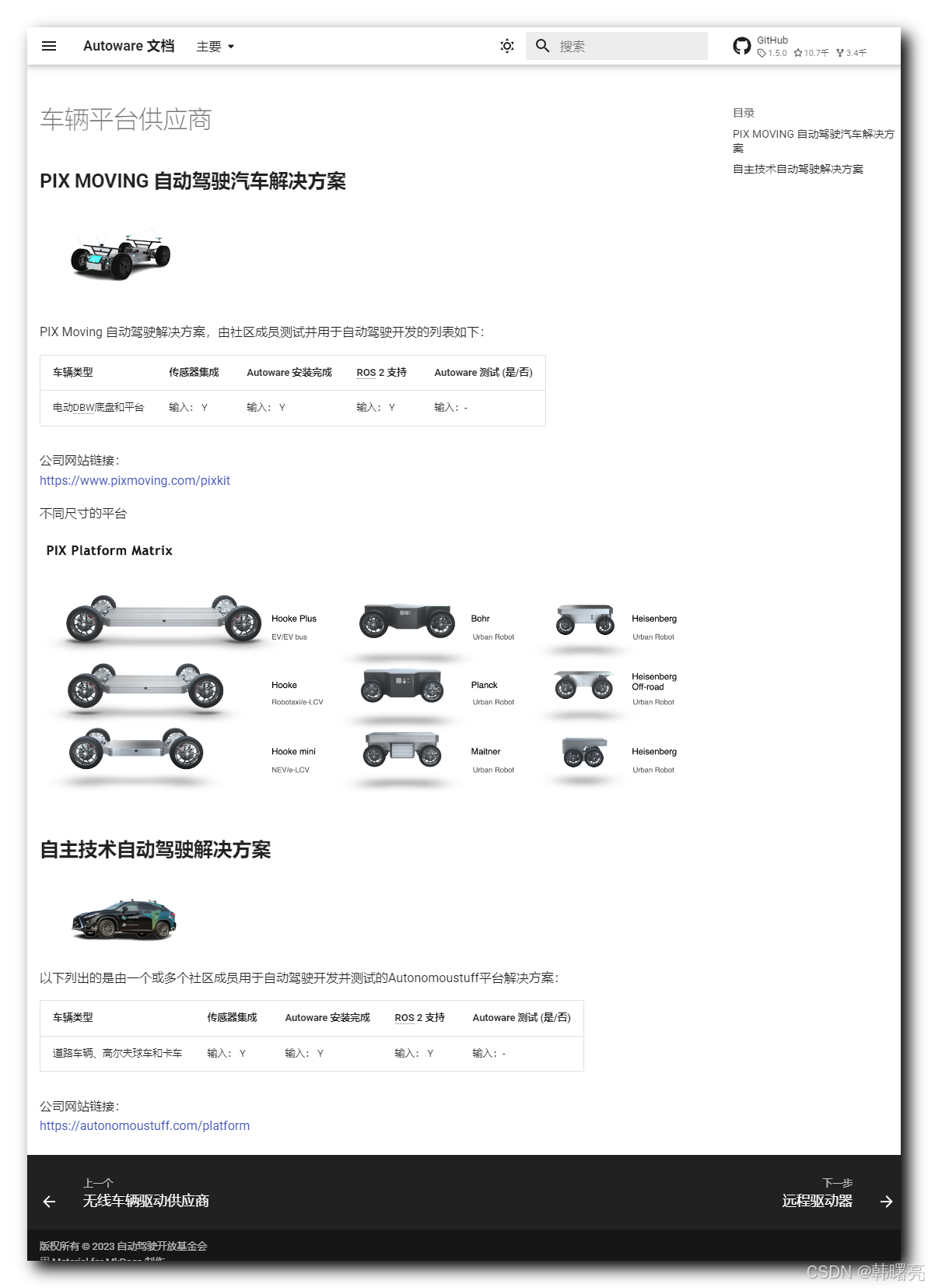
- 线控底盘 Vehicle Platform Suppliers
- 远程操控 Remote Drive
- 开发套件 AD Sensor Kit Suppliers
② 硬件接入步骤
硬件接入的关键步骤 :
- 安装驱动 : 安装对应设备的 ROS 2 驱动(官方或第三方)。
- 配置驱动 : 配置驱动参数(如设备 IP、话题名称、校准文件路径)。
- 集成驱动 : 编写 / 修改 launch 文件,集成驱动到 Autoware 启动流程。
- 验证数据 : 验证数据接收(通过 rviz2 查看话题是否正常发布)。
③ 自动驾驶技术点
开发 Autoware 需要的技术 :
- Docker
- ROS 2
- C++
- Python
- Autoware
4、软件架构
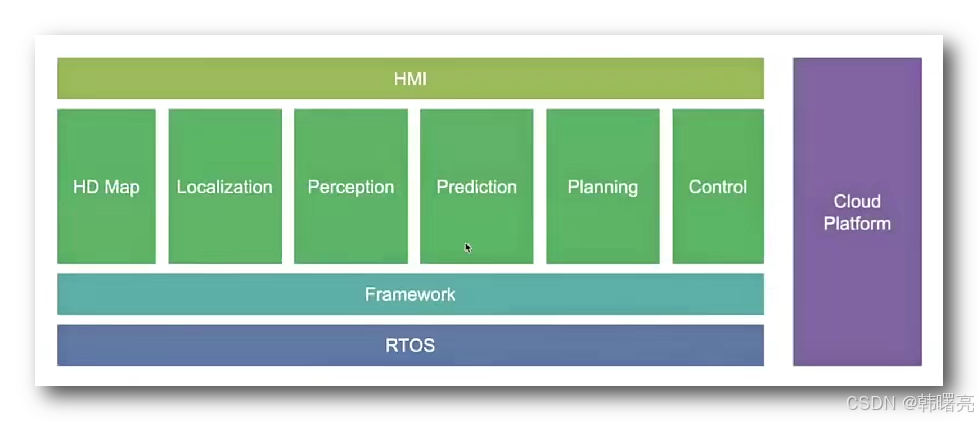
自动驾驶 软件系统 架构 :
- 实时操作系统 ( RTOS ) : 开发阶段使用 Ubuntu 操作系统即可 , 推荐 Ubuntu 22.04 系统 ;
- 框架层 ( Framework ) : ROS 2 Humble 机器人操作系统框架 + Autoware.Universe 自动驾驶框架 ;
- 应用算法层 ( Application Layer ) : 下面的 每个算法模块 都是 ROS2 机器人操作系统框架的 独立运行的 main 函数节点 ;
- 高精地图 ( HD Map ) 、定位系统 ( Localization ) 、感知系统 ( Perception ) 、预测系统 ( Prediction ) 、决策规划 ( Planning ) 、实时控制 ( Control ) ;
- 人机界面 ( HMI ) : 车内的 人机交互 终端 ;
- 云平台 ( Cloud Platform ) : 维护 高精地图 , 算法仿真 等功能 ;
RTOS 就是 Ubuntu 22.04 系统 ,
Framework 就是 ROS 2 Humble + Autoware.Universe 自动驾驶框架 ,
高精地图、定位系统、感知系统、预测系统、决策规划 等模块 , 各自都是 ROS2 机器人操作系统框架的 独立运行的 main 函数节点 ;
5、开发方向
可参考 【自动驾驶】自动驾驶概述 ① ( 自动驾驶 与 无人驾驶 | 自动驾驶 相关岗位 及 技能需求 ) 二、自动驾驶 相关岗位 及 技能需求 , 使用默认的模型和算法即可 ,
个人开发者或小型团队 进行初期功能验证 使用 Autoware.Universe 的默认算法配置 即可 , 只需要 开发自己感兴趣的模块 , 独立开发一个 ROS 2 节点程序 ;
6、高精地图 + 定位系统 重要性
高精地图 和 定位系统 是 自动驾驶 中的 最终要的部分 , 有了这两个部分 , 不需要 感知系统、预测系统、决策系统 也可以进行自动驾驶 , 根据 高精地图 和 定位系统 就可以 在 规划系统 中 规划出路径 , 根据规划路径 启动自动驾驶 , 遇到障碍就停车 , 等待人工接管 , 这是最简单的 自动驾驶 ;
高精地图 参考 【自动驾驶】自动驾驶概述 ⑦ ( 自动驾驶软件系统概述 | 高精地图 HD Map | 高精地图特点 | 高精地图常见格式 | 定位模块 | RTK 定位 | 惯导定位 | 几何定位 ) 博客 ;
Autoware 可以使用 点云地图 和 矢量地图 两种地图 ;
① 创建 点云地图 : 一般使用 同步定位与地图构建 ( SLAM , Simultaneous Localization And Mapping) 技术 创建 , 这是自动驾驶核心技术 , 通过 激光雷达 传感器数据 实时推算 自身位置 并构建 环境地图 ;
SLAM 构建点云地图 参考文档 : https://autowarefoundation.github.io/autoware-documentation/main/how-to-guides/integrating-autoware/creating-maps/open-source-slam/
点云地图参考 :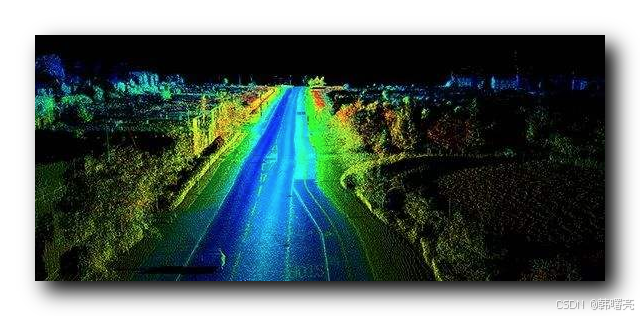
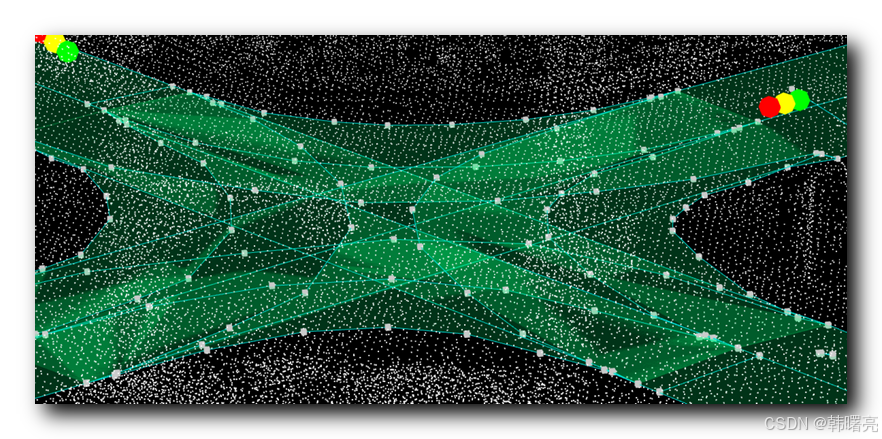
② 创建 矢量地图 参考 https://autowarefoundation.github.io/autoware-documentation/pr-279/how-to-guides/integrating-autoware/creating-maps/ 文档 , 这是 Autoware 官方提供的 创建地图 文档 , 使用 Vector Map Builder 工具 bag2lanelet 创建 Lanelet2 格式的 高精地图 ;
创建矢量地图 工具 bag2lanelet : https://autowarefoundation.github.io/autoware_tools/main/bag2lanelet/ ;
矢量地图参考 : https://tools.tier4.jp/feature/vector_map_builder_ll2/
二、Autoware.Universe 硬件参考
0、硬件简介
Autoware 文档中 在 https://autowarefoundation.github.io/autoware-documentation/main/reference-hw/ 页面 提供了 参考硬件设计 , 给出了如下硬件的参考设备 , 大部分是国外设备 , 可选择国内同类竞品价格更低 ;
- 自动驾驶专用计算机 AD COMPUTER
- 激光雷达 LiDAR
- 毫米波雷达 LiDAR
- 摄像头 CAMERA
- 热成像摄像头 Thermal CAMERA
- 定位 / 惯导 IMU, AHRS & GNSS/INS
- 线控控制器 Vehicle Drive By Wire Suppliers
- 线控底盘 Vehicle Platform Suppliers
- 远程操控 Remote Drive
- 开发套件 AD Sensor Kit Suppliers
1、计算单元
https://autowarefoundation.github.io/autoware-documentation/main/reference-hw/ad-computers/

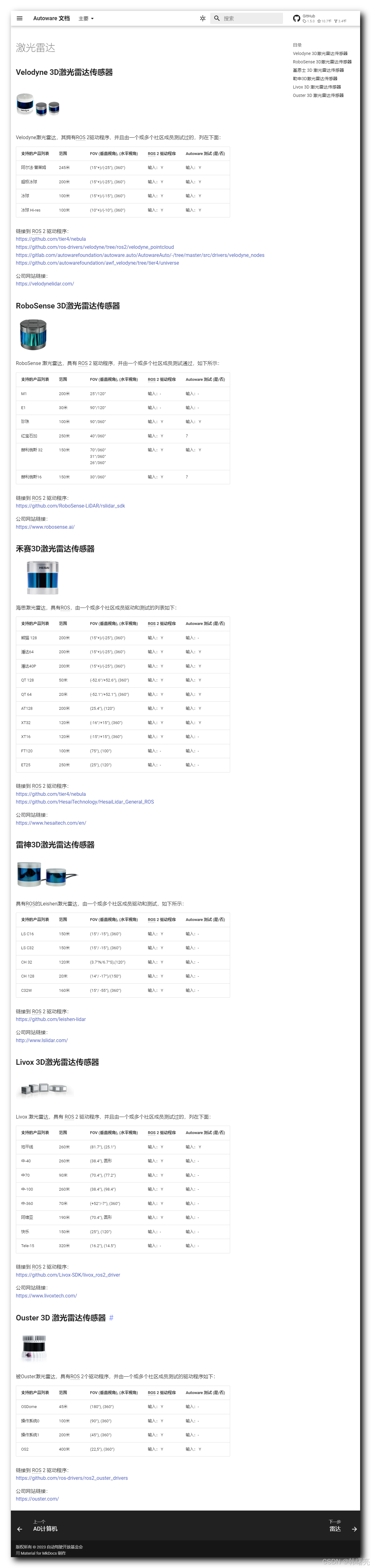
2、激光雷达
https://autowarefoundation.github.io/autoware-documentation/main/reference-hw/lidars/
3、毫米波雷达
https://autowarefoundation.github.io/autoware-documentation/main/reference-hw/radars/

4、摄像头
https://autowarefoundation.github.io/autoware-documentation/main/reference-hw/cameras/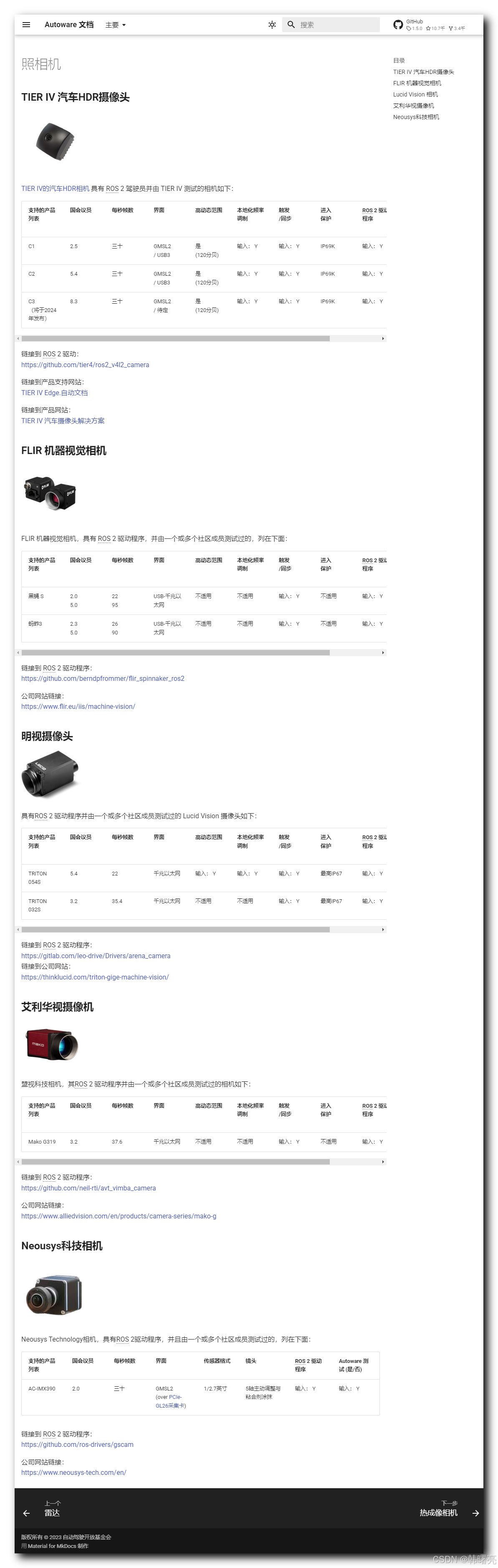
5、热成像摄像头
https://autowarefoundation.github.io/autoware-documentation/main/reference-hw/thermal_cameras/
6、定位模块 - 惯导 / RTK
https://autowarefoundation.github.io/autoware-documentation/main/reference-hw/imu_ahrs_gnss_ins/
7、线控控制器

8、线控底盘
9、远程控制
https://autowarefoundation.github.io/autoware-documentation/main/reference-hw/remote_drive/

10、开发套件

三、Autoware.Universe 开发文档
1、Autoware 文档介绍
文档首页 : https://autowarefoundation.github.io/autoware-documentation/main/ ;
该文档可以在 https://github.com/autowarefoundation/autoware-documentation 页面下载到本地查看 ;
该文档 对 Autoware 文档进行简要介绍 ;
在该网页中 , 介绍了有下面三种源码对应的文档 ;
① Autoware Universe 各组件文档
Autoware Universe 各组件文档 : https://autowarefoundation.github.io/autoware_universe/main/ ;
该文档是 Autoware Universe 各个组件的文档入口 , 在顶部的导航栏中可以看到 各个组件的 文档入口 ;
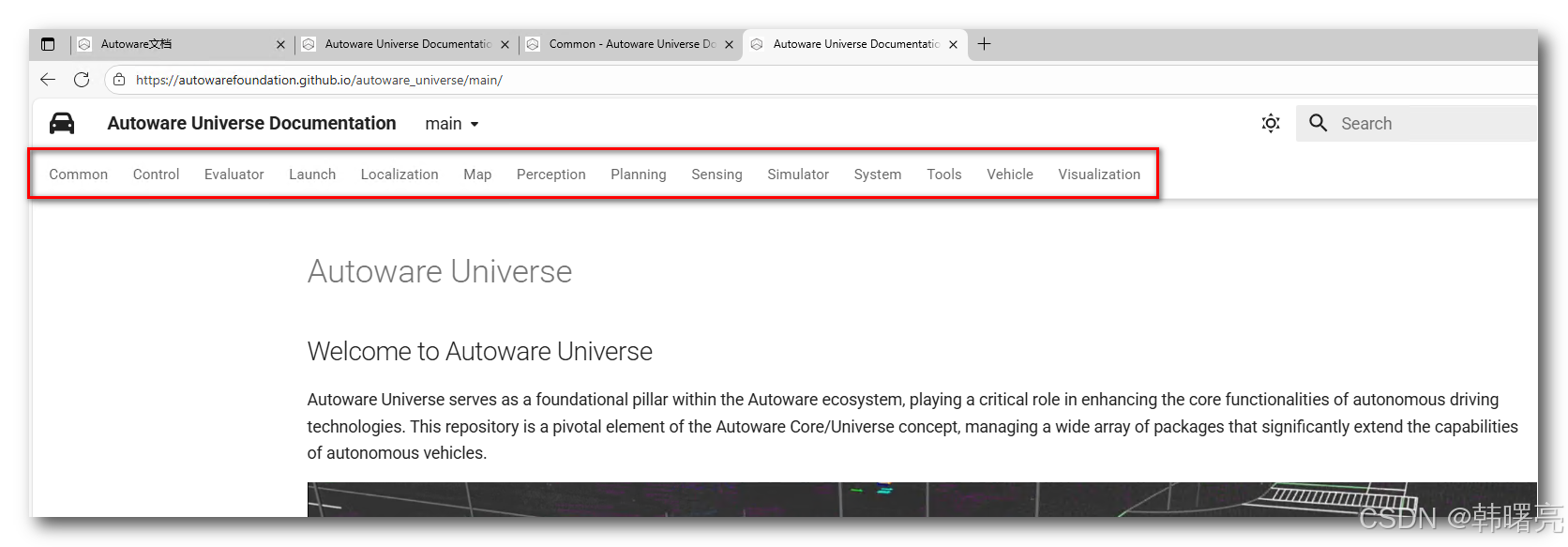
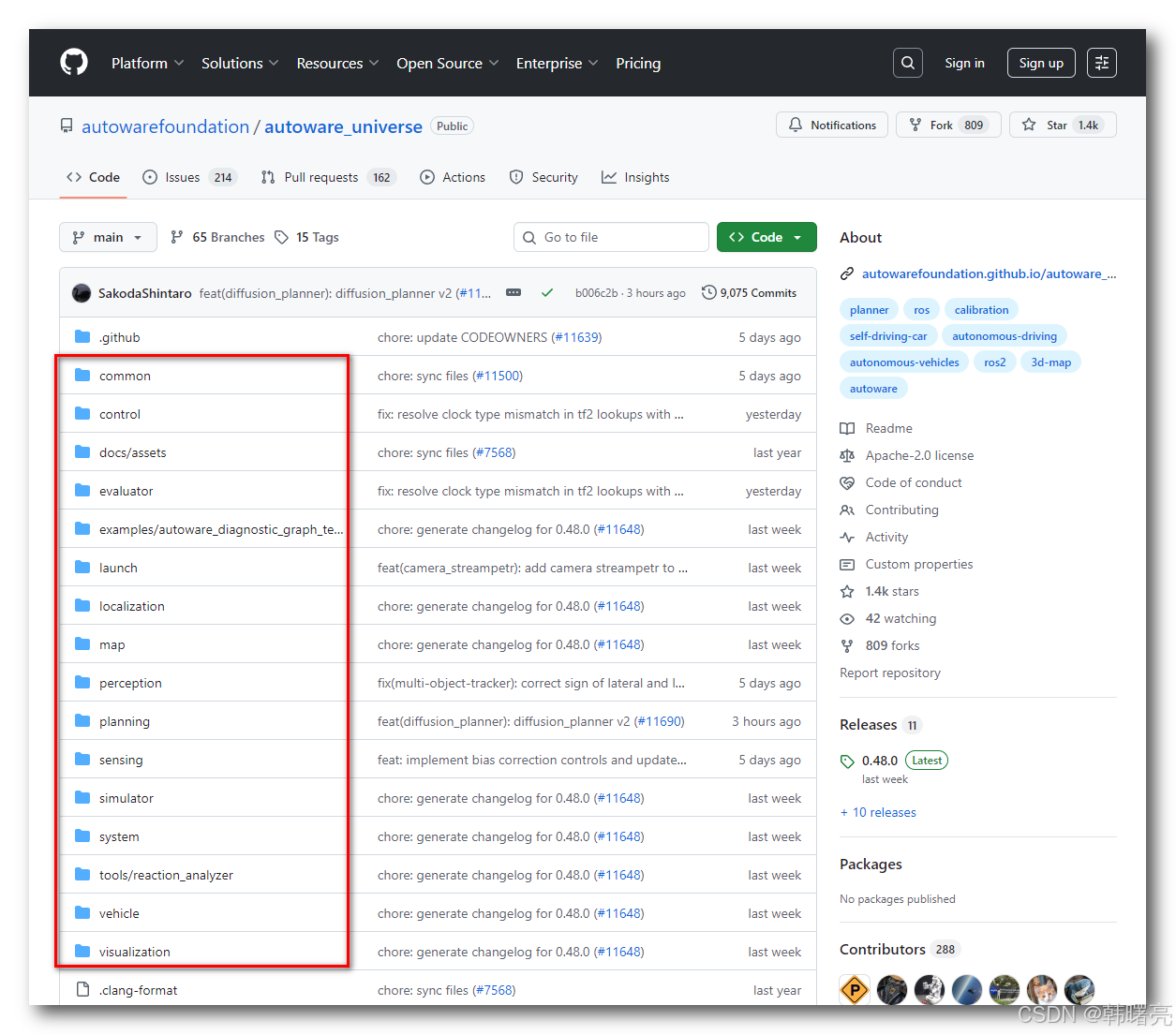
上面的各个 组件 对应 autowarefoundation/autoware_universe 源码 中的 组件目录 :
② Autoware Core 文档
Autoware Core 各组件文档 地址 : https://autowarefoundation.github.io/autoware_core/main/ , 页面如下 :
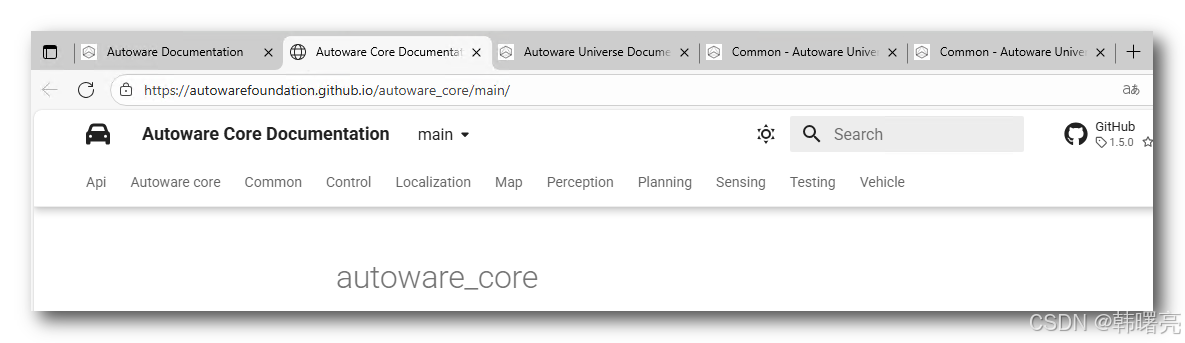
上述组件 对应的 autowarefoundation/autoware_core 项目源码的 组件如下 :
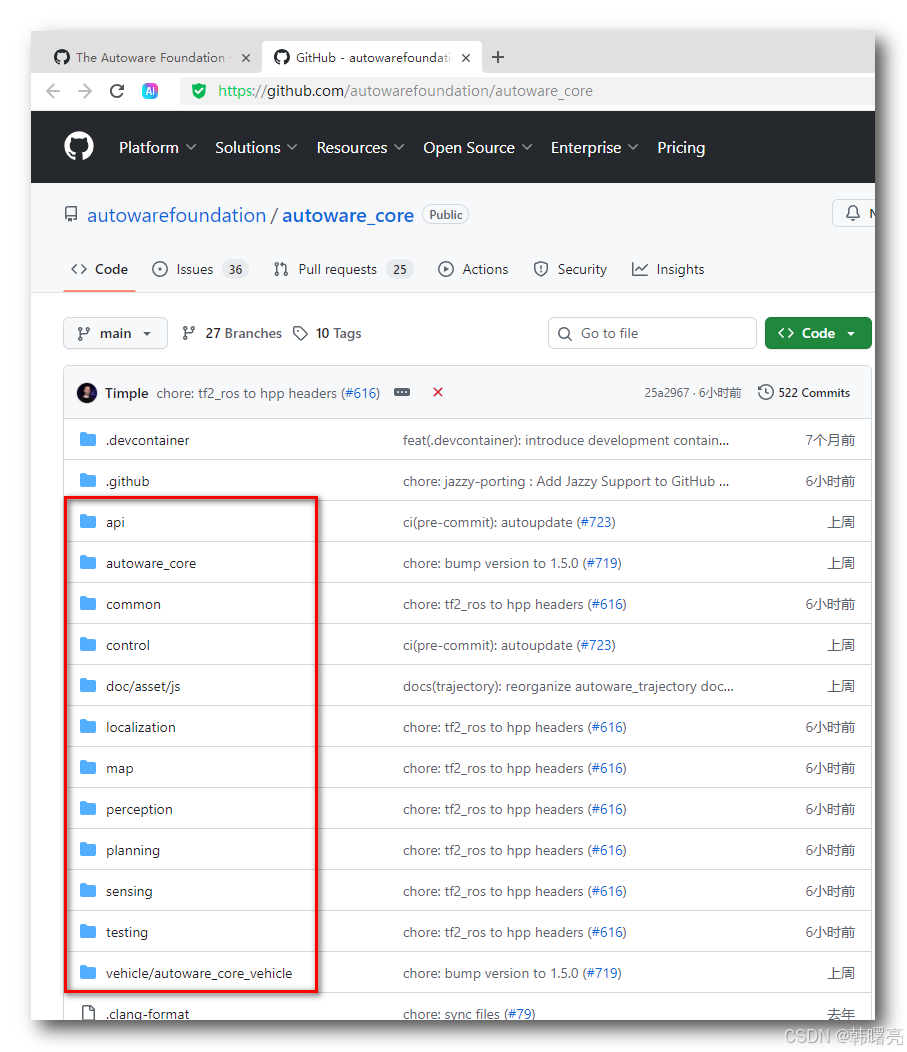
③ Autoware Tools 各组件文档
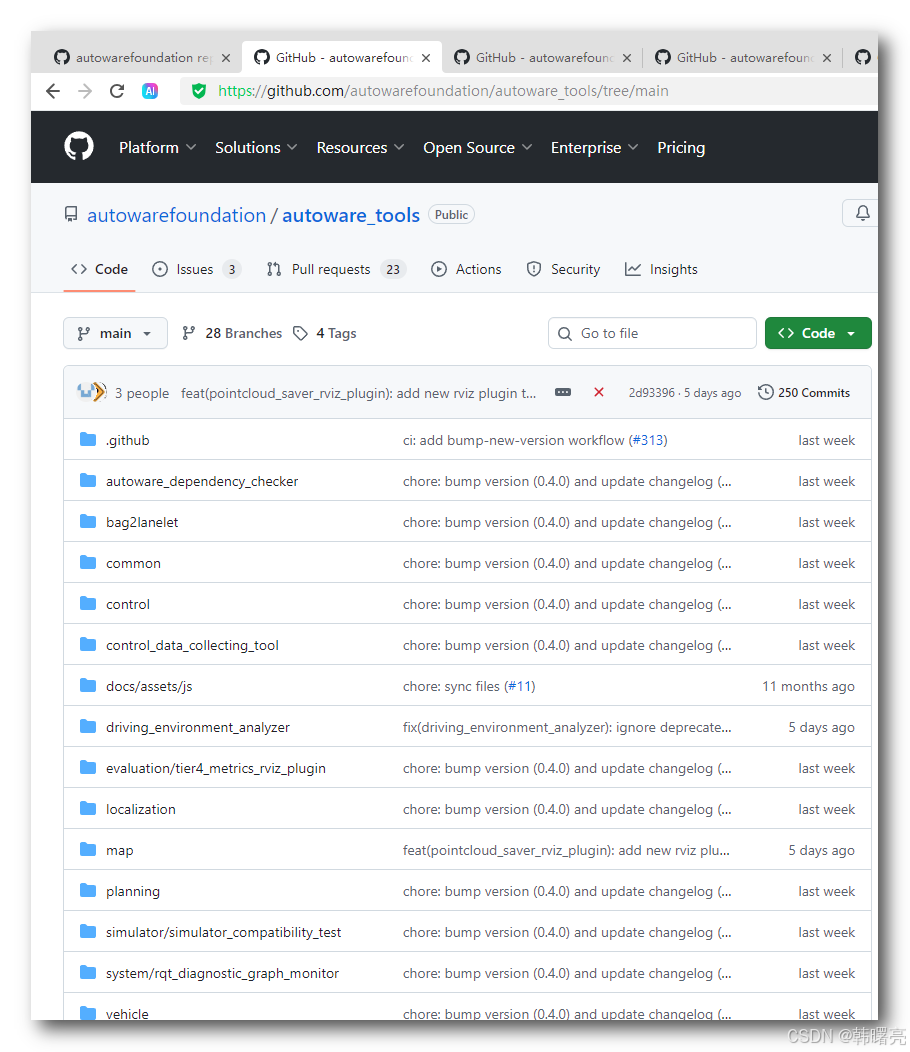
Autoware Tools 各组件文档 : https://autowarefoundation.github.io/autoware_tools/main/
上述 文档 对应的 autowarefoundation/autoware_tools 项目源码的 组件如下 :

立足具身智能前沿赛道,致力于搭建全球化、开源化、全栈式技术交流与实践共创平台。
更多推荐

 42
42 0
0- 0



 已为社区贡献8条内容
已为社区贡献8条内容

所有评论(0)