ubuntu安装 ROS/ROS2 + Gazebo(适用于ubuntu20.04和ubuntu22.04)
注意:ubuntu20.04版本安装gazebo9,ubuntu22.04版本安装gazebo11。
👆上面这个是CSDN强加的广告,与正文内容无关,不用看直接跳过。
注意:ubuntu20.04版本安装gazebo9,ubuntu22.04版本安装gazebo11。
一、准备工作
1.1 完成ubuntu的基本安装及配置
ubuntu的配置见Ubuntu的基础配置
1.2 完成Ros安装
同1.1使用小甲鱼的一键安装完成ros的安装。
sudo wget http://fishros.com/install -O fishros && . fishros
RUN Choose Task:[请输入括号内的数字]
---众多工具,等君来用---
ROS相关:
[1]:一键安装(推荐):ROS(支持ROS/ROS2,树莓派Jetson)
[3]:一键安装:rosdep(小鱼的rosdepc,又快又好用)
[4]:一键配置:ROS环境(快速更新ROS环境设置,自动生成环境选择)
[9]:一键安装:Cartographer(18 20测试通过,16未测. updateTime 20240125)
[11]:一键安装:ROS Docker版(支持所有版本ROS/ROS2)
[16]:一键安装:系统自带ROS (!!警告!!仅供特殊情况下使用)
常用软件:
[2]:一键安装:github桌面版(小鱼常用的github客户端)
[6]:一键安装:NodeJS环境
[7]:一键安装:VsCode开发工具
[8]:一键安装:Docker
[10]:一键安装:微信(可以在Linux上使用的微信)
[12]:一键安装:PlateformIO MicroROS开发环境(支持Fishbot)
[15]:一键安装:QQ for Linux
配置工具:
[5]:一键配置:系统源(更换系统源,支持全版本Ubuntu系统)
[13]:一键配置:python国内源
[17]:一键配置: Docker代理(支持VPN+代理服务两种模式)
[0]:quit
请输入[]内的数字以选择:输入1,按照提示完成对应ros的安装。
二、安装gazebo
2.1 更新软件包列表
sudo apt-get update2.2 安装gazebo
2.2.1 ubuntu20.04 版本安装gazebo11
(1)安装Gazebo:在安装ROS后,可以通过以下命令安装Gazebo仿真平台:
sudo apt-get install gazebo11(2)安装ROS控制器包:为了使用Gazebo仿真平台中的控制器,需要安装ROS控制器包。可以通过以下命令进行安装:
sudo apt-get install ros-Noetic-ros-control ros-Noetic-ros-controllers在Ubantu系统中打开终端,查看Ros版本。
ubuntu版本 ubuntu18.04 ubuntu20.04 ubuntu22.04 对应Ros版本 melodic Noetic humble
(3)安装Gazebo的Ros插件(这里以Noetic为例子),这个根据用的ros版本修改。。
sudo apt install ros-Noetic-gazebo-*(4)验证安装。
apt search ros-Noetic-gazebo | grep gazebo-ros2.2.1 ubuntu22.04 版本安装gazebo11
(1)添加PPA。 添加提供非amd64架构Gazebo 11软件包(对应ubuntu22.04)的PPA:
sudo add-apt-repository ppa:openrobotics/gazebo11-gz-cli(2)更新软件包列表:
sudo apt-get update(3)装Gazebo:在安装ROS后,可以通过以下命令安装Gazebo仿真平台:
sudo apt-get install gazebo11sudo apt-get install libgazebo11-dev
(4)安装Gazebo的Ros插件。
sudo apt install ros-humble-gazebo-ros(5)安装完整 Gazebo 集成(可选)。
sudo apt install ros-humble-gazebo-ros-pkgs这会安装:
ros-humble-gazebo-ros
ros-humble-gazebo-ros2-control
ros-humble-gazebo-dev等依赖包
(6)验证安装。
apt search ros-humble-gazebo | grep gazebo-ros结果为
root@MAX-LLRED:/home/liulei# apt search ros-humble-gazebo | grep gazebo-ros
WARNING: apt does not have a stable CLI interface. Use with caution in scripts.
ros-humble-gazebo-ros/jammy,jammy,now 3.9.0-1jammy.20250719.042130 amd64 [已安装,自动]
ros-humble-gazebo-ros-dbgsym/jammy,jammy 3.9.0-1jammy.20250719.042130 amd64
debug symbols for ros-humble-gazebo-ros
ros-humble-gazebo-ros-pkgs/jammy,jammy,now 3.9.0-1jammy.20250719.055022 amd64 [已安装]
ros-humble-gazebo-ros2-control/jammy,jammy 0.4.10-1jammy.20250719.045540 amd64
ros-humble-gazebo-ros2-control-dbgsym/jammy,jammy 0.4.10-1jammy.20250719.045540 amd64
debug symbols for ros-humble-gazebo-ros2-control
ros-humble-gazebo-ros2-control-demos/jammy,jammy 0.4.10-1jammy.20250719.050625 amd64
ros-humble-gazebo-ros2-control-demos-dbgsym/jammy,jammy 0.4.10-1jammy.20250719.050625 amd64
debug symbols for ros-humble-gazebo-ros2-control-demos则表明 Gazebo 集成安装成功。
三、运行gazebo
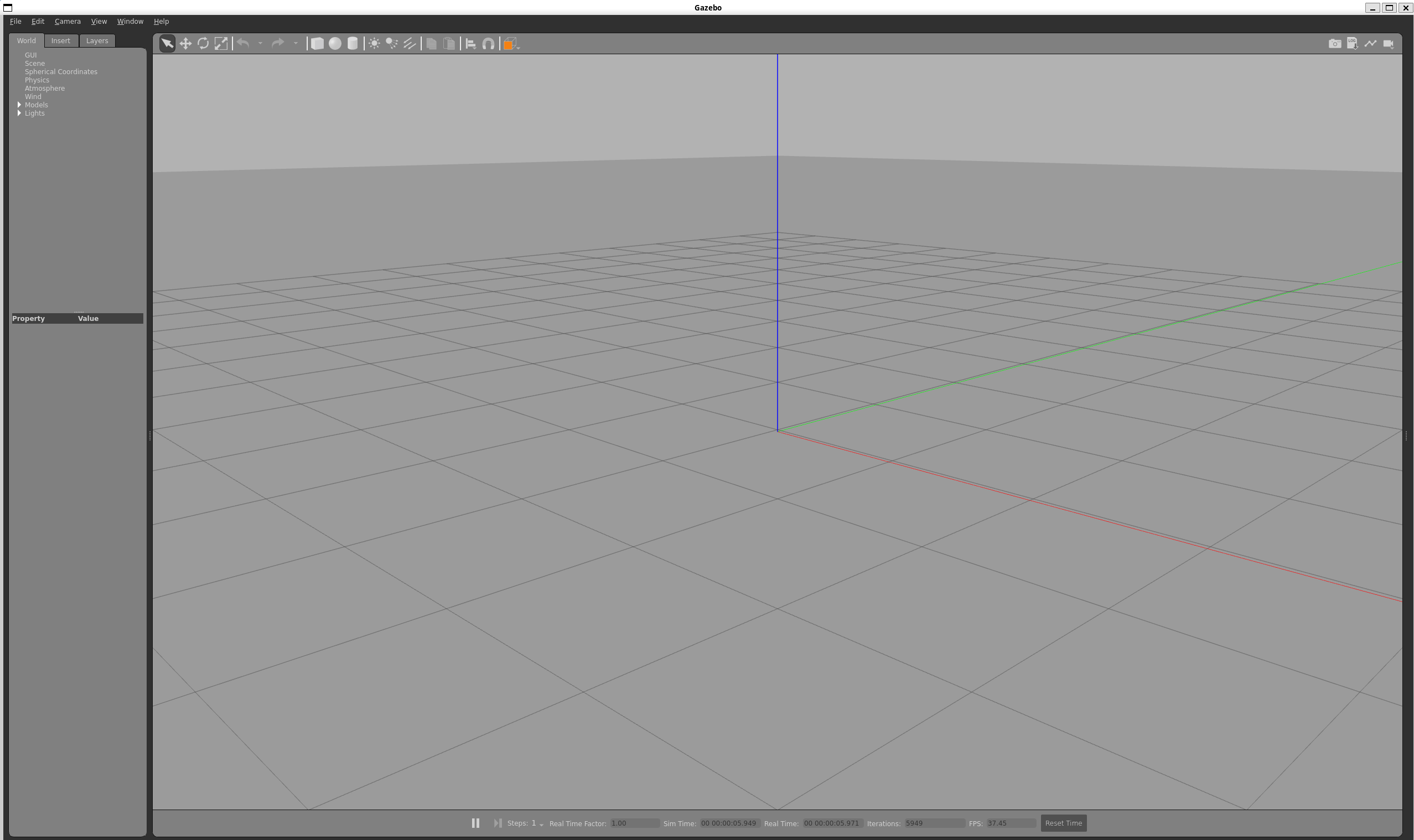
运行gazebo看看能不能运行成功:
gazebo
补充:下载Gazebo模型
打开ubuntu终端,输入以下指令:
cd ~/.gazebo && wget https://gitee.com/ohhuo/scripts/raw/master/gazebo_model.py && python3 gazebo_model.py 然后等待脚本运行完成,当然也不用等它完成,因为一共有281个模型,是逐一下载并解压到~/.gazebo/models/目录的。
此时再次打开终端,输入gazebo,把选项卡切换到Insert
gazebo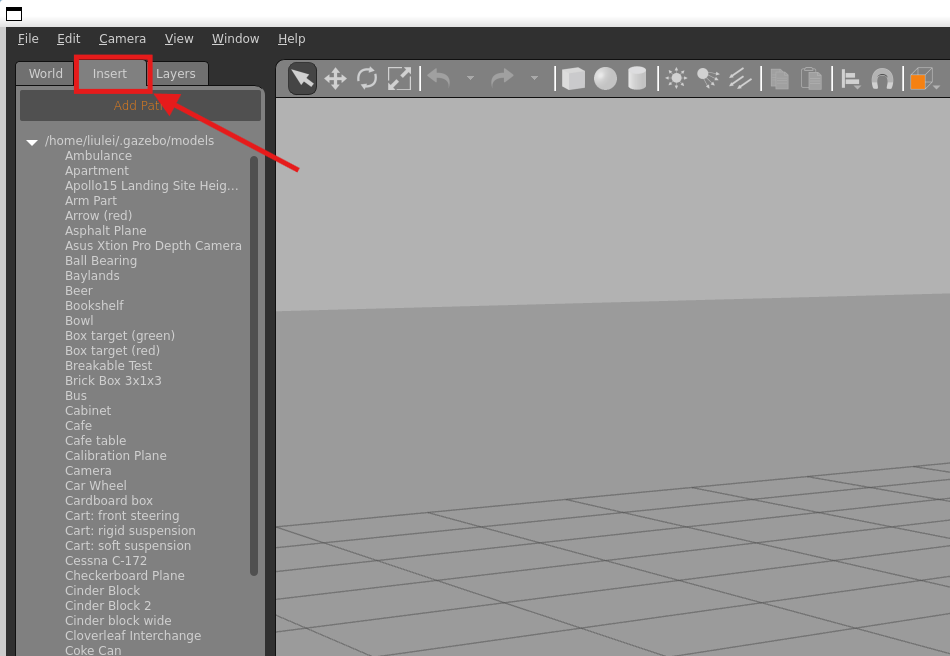
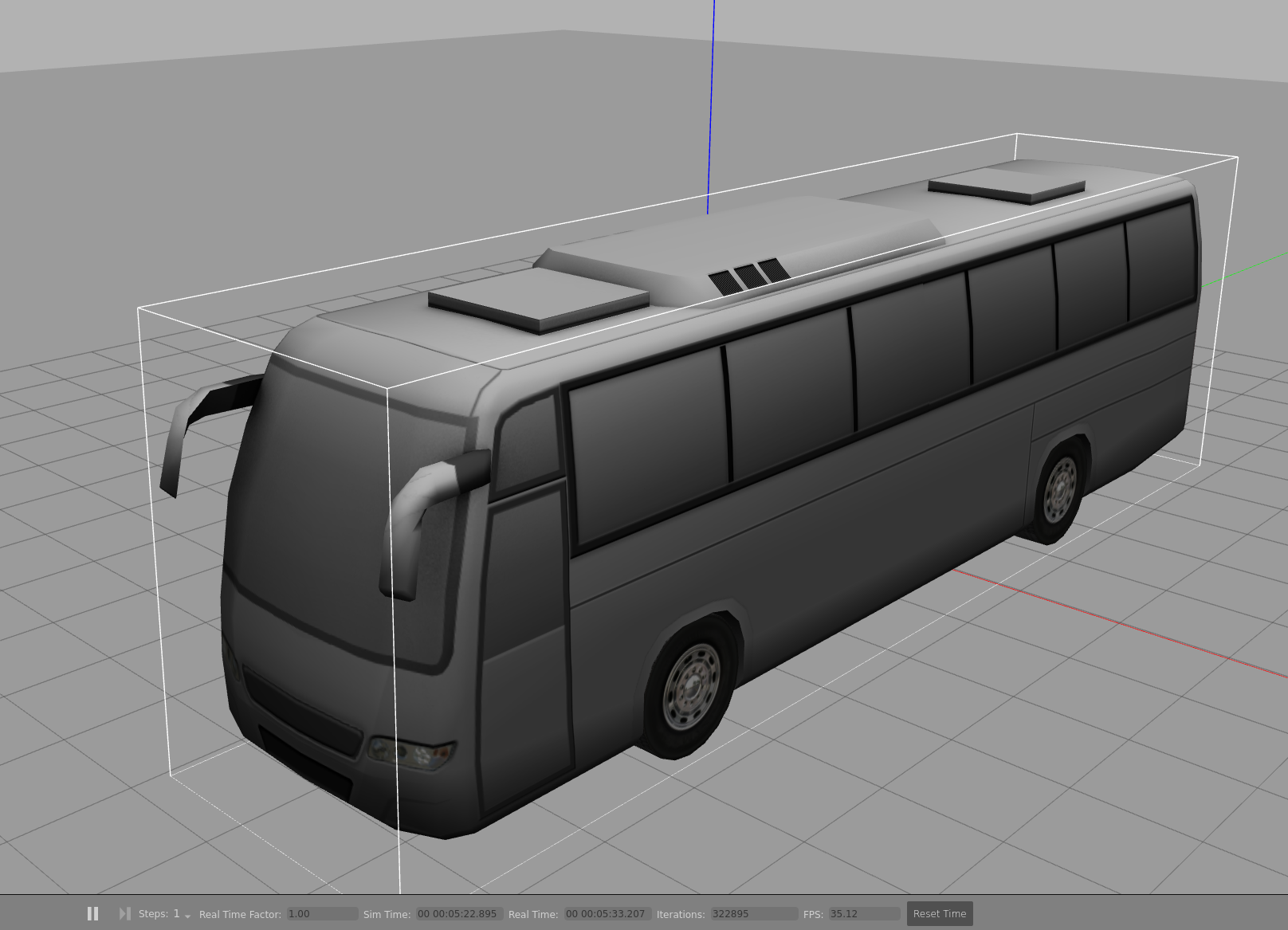
可以看到已下载在~/.gazebo/models/目录的模型,点击列表中的模型名称,在右边窗口可以放置模型。

如果需要删除放置的模型,可以点击右边的模型,将它选中,再按下Delet或者鼠标右键选择删除即可删除。

本文结束了,👇下面这个是CSDN强加的广告,与正文内容无关,不用看直接跳过。

立足具身智能前沿赛道,致力于搭建全球化、开源化、全栈式技术交流与实践共创平台。
更多推荐

 27
27 0
0- 0



 已为社区贡献11条内容
已为社区贡献11条内容

所有评论(0)