转速、电流双闭环控制直流调速系统设计与仿真
1.直流调速系统建模
对于经常正、反转运行的调速系统,缩短起、制动过程的时间是提高生产率的重要因素。在起动或制动过渡过程中,希望始终保持电流(电磁转矩)为允许的最大值,使调速系统以最大的加(减)速度运行。当到达稳态转速时,最好使电流立即降下来,使电磁转矩与负载转矩相平衡,从而迅速转入稳态运行。
1.1直流调速系统组成
应该在起动过程中只有电流负反馈,没有转速负反馈,在达到稳态转速后,又希望只要转速负反馈,不再让电流负反馈发挥作用。在系统中设置两个调节器,分别引入转速负反馈和电流负反馈以调节转速和电流,把转速调节器的输出当作电流调节器的输入,再用电流调节器的输出去控制电力电子变换器UPE。从闭环结构上看,电流环在里面,称作内环;转速环在外边,称作外环。形成了转速、电流反馈控制直流调速系统(简称双闭环系统)。
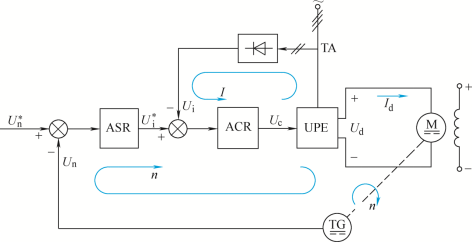
图1 转速、电流反馈控制直流调速系统原理图
1.2系统稳态参数计算
转速、电流双闭环直流调速系统在稳态工作中,当两个调节器都不饱和时,各变量之间有下列关系:
1.3系统动态数学模型
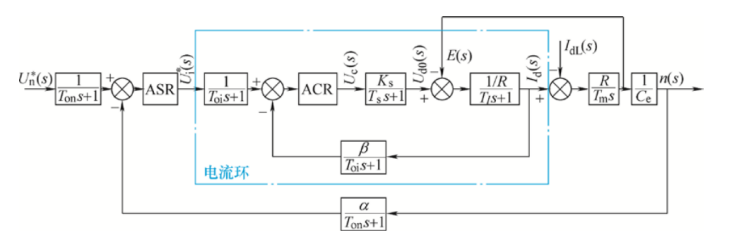
图 1-2 转速电流双闭环直流调速系统的动态结构图
2.控制器设计
工程设计方法:把实际系统校正或简化成典型Ⅰ、典型Ⅱ系统,可以利用现成的公式和图表来进行参数计算,设计过程简便得多。
在控制系统中设置调节器是为了改善系统的静、动态性能。控制系统的动态性能指标包括对给定输入信号的跟随性能指标和对扰动输入信号的抗扰性能指标。在工程实际中,通常采用工程设计方法来设计直流双闭环调速系统,将电流环设计成典型Ⅰ系统,转速环设计成典型Ⅱ系统。下面分别讨论两个调节器的设计。
2.1电流调节器ACR的设计
①确定时间常数:![]()
电流滤波时间常数:为滤除高频噪声、减小滤波延时且满足PWM变换器惯性环节近似处理条件![]()
②计算电流调节器参数:

![]()
![]()
2.2转速调节器ASR的设计
①确定时间常数:
按照典型I型系统设计,电流环等效时间常数:
![]()
转速滤波时间常数(按题目给定):
![]()
转速环小时间常数:
![]()
②选择转速调节器结构
按照设计要求,选择PI调节器,传递函数为
![]()
③计算转速调节器参数:
按跟随和抗扰性能都较好的原则,取h = 5,则ASR的超前时间常数为:
![]()
转速环开环增益:
ASR的比例系数:
3、直流调速系统仿真实验及结果分析
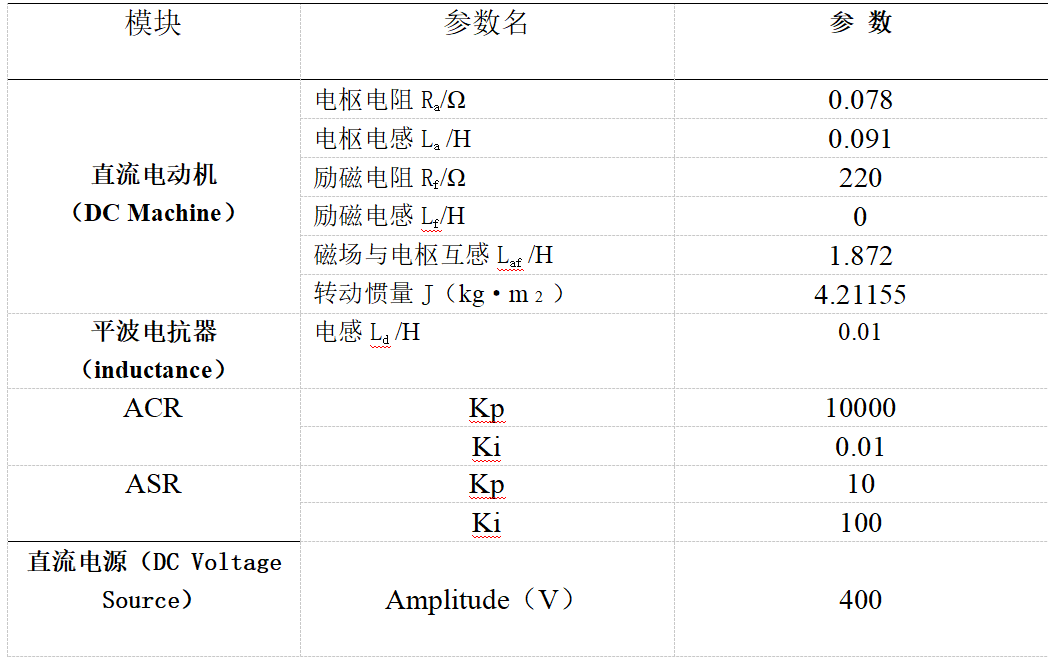
根据系统的动态结构图或系统组成原理图,以及前面的参数计算,在MATLAB/Simulink平台上搭建双闭环直流调速系统的仿真模型。仿真参数设置如下:
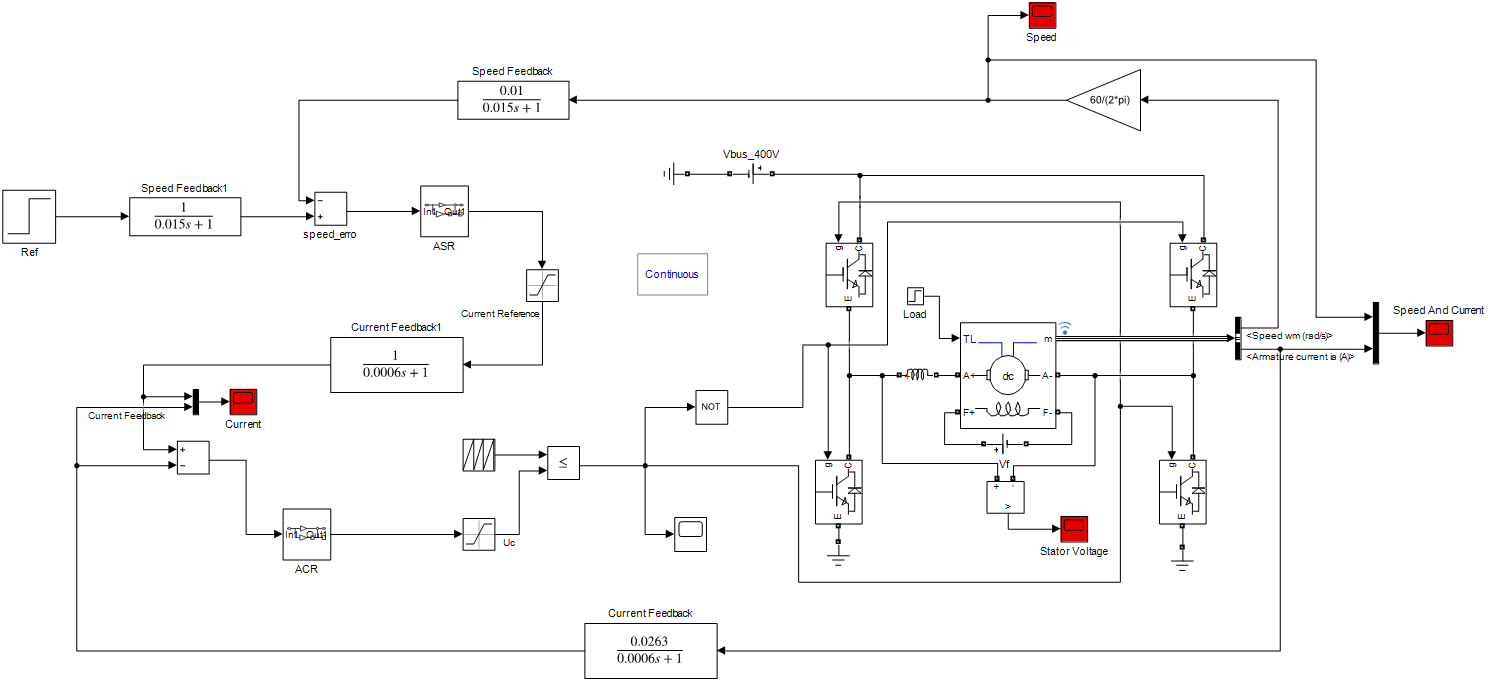
3.1仿真模型
PWM直流调速系统系统的主电路由三相对称交流电压源、晶闸管整流桥、IGBT、平波电抗器、直流电动机等部分组成。在仿真中,同步脉冲触发器用于触发晶闸管整流桥,PWM控制器用于触发IGBT,直流电动机励磁由直流电源直接供电。下面将介绍各模块的参数设置与系统建模。
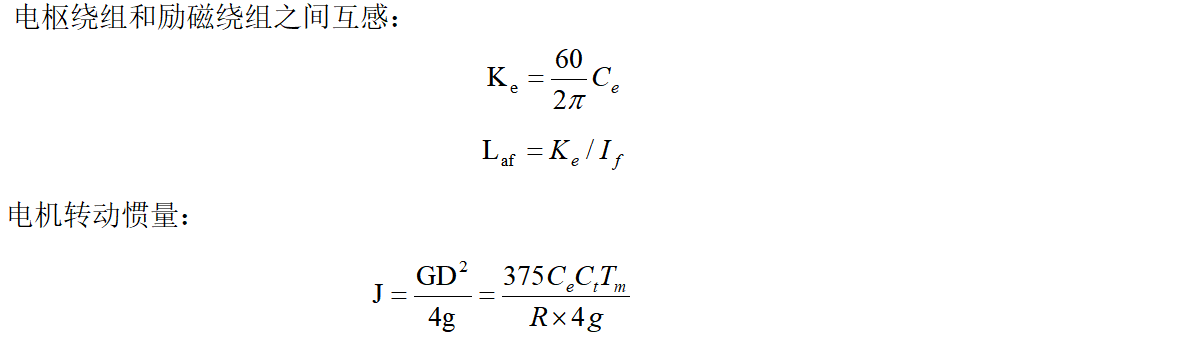
①电机参数:
![]()
![]()
![]()
![]()
②额定负载转矩:
![]()
③ACR与ASR参数设置(具体参数设计结合实际):

④电抗器的参数设置:
首先从元件模块组中选取 Series RLC Branch 模块,然后打开参数设置对话框,类型直接选为电感即可得到电抗器。具体参数设置下图所示,平波电抗器的电感值是通过仿真实验比较后得到的优化参数
⑤模型参考参数见表(本文设计仅供参考,具体参数设计应当结合系统实例)
3.2Simulink仿真设置
1.传递函数模块:
simulink->continuous->transfer fuc
Speed Feedback参数设置
分子为转速反馈系数
分母为转速反馈滤波系数
Current Feedback参数设置
分子为电流反馈系数
分母为电流反馈滤波系数
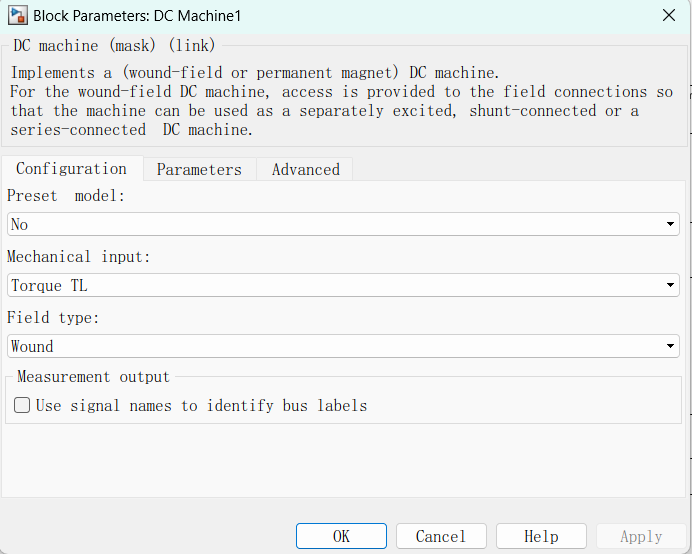
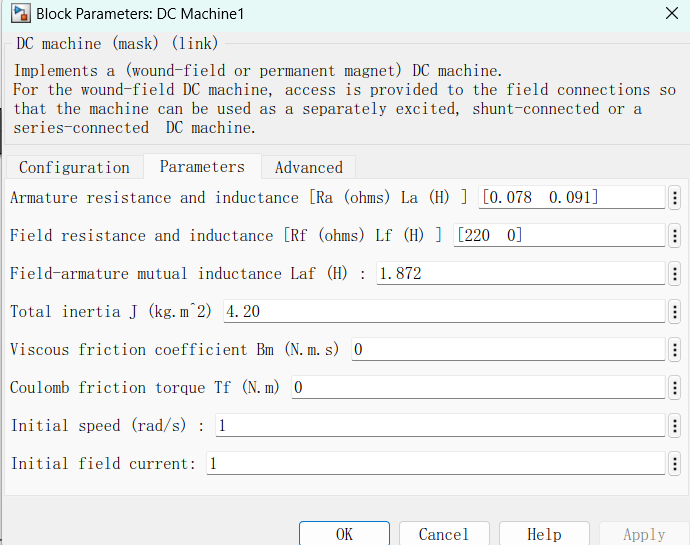
2.直流电机模块:
直接搜索DC Machine模块(参数设置按照实际情况)
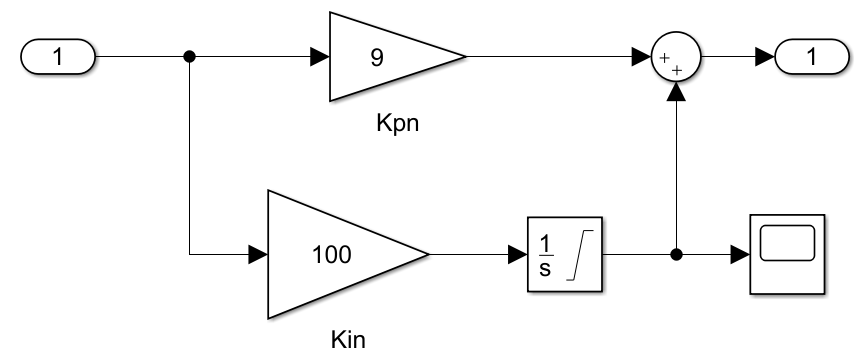
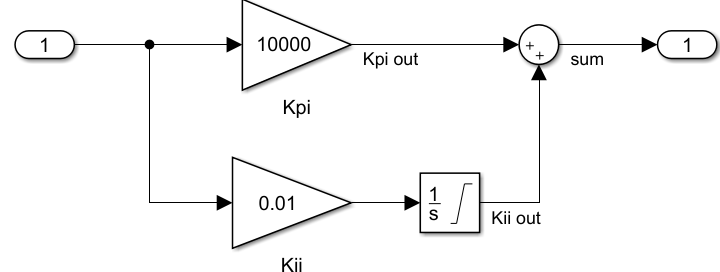
3.ASR与ACR设置(具体需要结合实际)
4.载波设置
在库里搜索Repeating Sequence
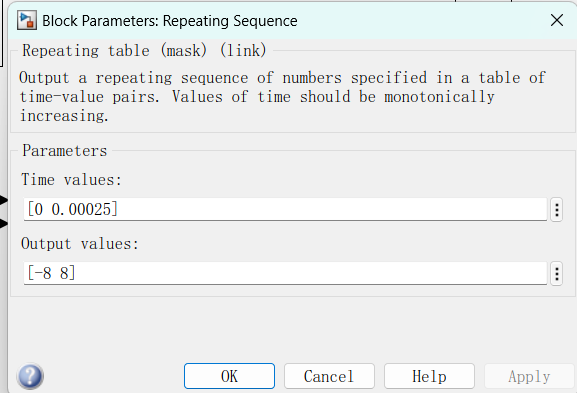
输出范围应当按照Uc决定,时间参数一般取pwm周期
5.限幅模块设置:
搜索Saturation,其设置应当按照题目要求
6.IGBT模块:
按照H桥接法连接后,保持默认参数即可
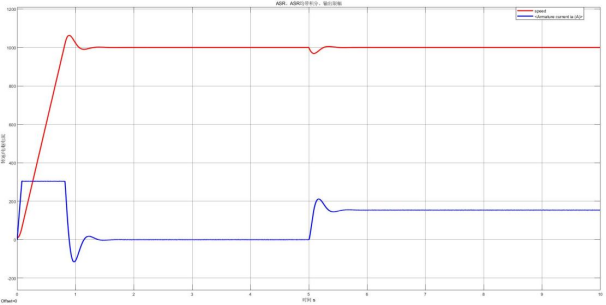
4.仿真结果及分析
系统参数初始设为直流电机空载启动,5s时刻加入50%额定负载,设置仿真时间为10s,给定电压信号U*=10V,其余参数均按照上述设置。

立足具身智能前沿赛道,致力于搭建全球化、开源化、全栈式技术交流与实践共创平台。
更多推荐

 17
17 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)