NVIDIA Cosmos:生成式物理世界模型快速上手指南3
本文系统探讨了认知能力在雷达系统中的核心作用,提出通过仿生学原理提升雷达感知与决策能力的必要性。论文指出,当前雷达系统虽具备高分辨率成像能力,但受限于人类操作员的反应速度与决策效率,无法充分发挥电子扫描阵列等技术的潜力。通过对比蝙蝠、鲸鱼等生物的回声定位系统,发现其具备动态调整感知参数、自主决策与执行的闭环认知机制,这为雷达系统提供了生物启发式设计范式。论文重点阐述了认知雷达的双层架构:内环通过实
NVIDIA Cosmos:生成式物理世界模型快速上手指南
全文概述
本文系统探讨了认知能力在雷达系统中的核心作用,提出通过仿生学原理提升雷达感知与决策能力的必要性。论文指出,当前雷达系统虽具备高分辨率成像能力,但受限于人类操作员的反应速度与决策效率,无法充分发挥电子扫描阵列等技术的潜力。通过对比蝙蝠、鲸鱼等生物的回声定位系统,发现其具备动态调整感知参数、自主决策与执行的闭环认知机制,这为雷达系统提供了生物启发式设计范式。论文重点阐述了认知雷达的双层架构:内环通过实时参数优化实现感知性能最大化,外环通过环境理解与目标识别驱动自主行动。研究还揭示了回声流场理论在三维空间导航中的应用价值,以及基于高分辨率距离像的目标识别方法。最终论证了认知雷达在自动驾驶、军事防御等场景中的应用潜力,强调通过仿生学原理构建感知-决策-行动闭环系统是突破传统雷达局限的关键路径。
术语解释
- 认知雷达:通过动态调整感知参数并自主决策的雷达系统,具备类似生物的感知-行动闭环能力,可实现目标跟踪、资源分配等任务的自动化。
- 回声流场:基于目标距离与角度变化率计算的三维动态场,用于预测碰撞时间与规划避障轨迹,是仿生导航的核心理论基础。
- 高分辨率距离像:通过雷达回波信号重建目标一维距离分布的图像,用于提取目标结构特征,支持基于生物回声定位机制的目标识别。
论文速读
论文实验
本文介绍了认知与传感系统的研究,并以蝙蝠的生物认知能力为例,探讨了如何将自然界的认知机制应用于雷达和声纳系统中。具体来说,文章从以下几个方面进行了研究:
- 认知系统的定义及其在雷达和声纳系统中的应用;
- 蝙蝠的生物认知能力及其对雷达和声纳系统的启示;
- 蝙蝠利用回波流场理论实现自主导航和目标识别的方法;
- 雷达和声纳系统中的目标识别技术。
在这些研究中,作者使用了多种方法来评估不同算法的效果,包括比较不同参数设置下的性能差异、分析不同算法的优缺点等。其中,蝙蝠的生物认知能力为雷达和声纳系统的设计提供了重要的参考,尤其是在目标识别和自主导航方面。同时,通过研究蝙蝠的认知机制,可以更好地理解自然界中存在的复杂现象,并从中获得新的灵感和技术思路。
关键图表解读
关键图表解读
图1:主雷达系统示意图展示了传统雷达依赖人工操作的局限性。该图通过Heathrow机场的空管雷达系统案例,揭示了人类操作员在决策环中的核心地位——雷达仅作为"感觉器官"提供原始数据,而真正的认知功能由操作员完成。这直接支撑了论文关于"认知是雷达系统必要组成部分"的核心论点。
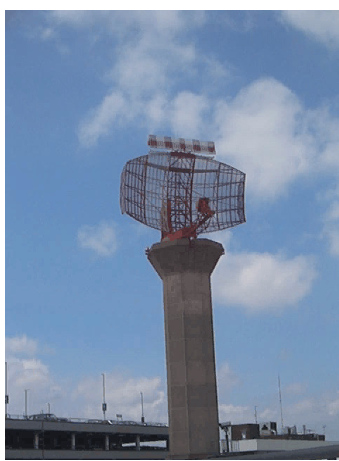
图2:高分辨率SAR图像展示了现代雷达技术的感知能力极限。该图通过俄亥俄州立大学体育场的SAR成像案例,揭示了即使在极高分辨率下,人类仍难以高效解析图像信息的问题,从而论证了引入认知处理的必要性——自动目标识别技术可显著提升信息提取效率。
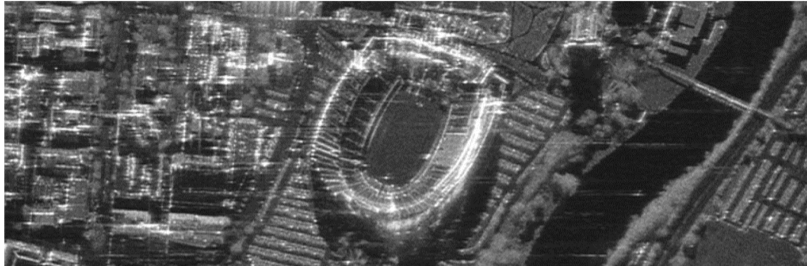
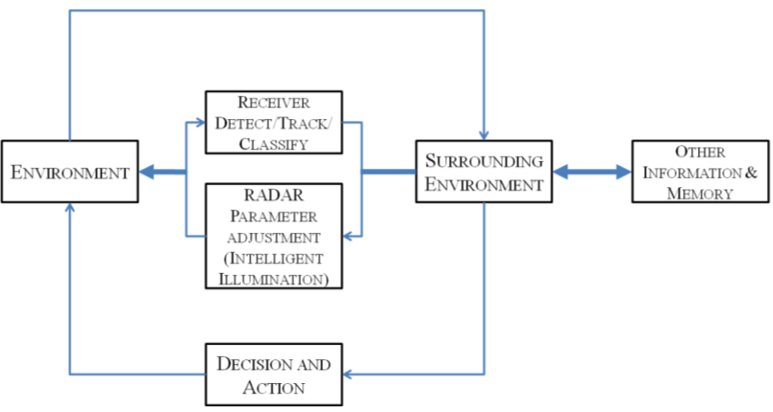
图3:认知雷达架构示意图揭示了系统设计的双环结构。内环实现传感器参数自适应调整,外环完成环境感知与决策。该架构通过分离"感知-行动"循环中的低级参数优化与高级决策功能,为分阶段实现认知雷达提供了技术路径。
论文总结
文章优点
- 论文深入探讨了雷达传感器的认知能力,并提出了实现认知雷达系统的必要性和挑战。
- 论文列举了电子扫描雷达的优点以及其在信号处理中的应用,为实现更智能的雷达系统提供了思路。
- 论文讨论了雷达图像处理中自动提取信息的重要性,并指出了需要开发自动技术来提高效率和可靠性。
- 论文提到了蝙蝠等动物的感知与决策过程,为雷达系统的设计提供了启示。
方法创新点
- 论文强调了认知雷达系统的发展趋势,提出了一种新的设计思路,即将人类的认知能力嵌入到雷达系统中。
- 论文探讨了利用变化的空间位置和波形参数来模拟蝙蝠等动物的感知过程的方法。
- 论文提出了使用知识辅助或基于知识的雷达方法,以提高雷达系统的性能。
未来展望
- 论文指出,随着雷达技术的发展,认知雷达系统将成为未来的趋势。
- 论文认为,需要进一步研究和发展更加智能化的雷达系统,以满足不断增长的需求。
- 论文呼吁研究人员关注自动技术的发展,以提高雷达系统的效率和可靠性。
- 论文认为,将自然界的感知与决策过程应用于雷达系统的设计是一个有前途的研究方向。

立足具身智能前沿赛道,致力于搭建全球化、开源化、全栈式技术交流与实践共创平台。
更多推荐

 10
10 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)