Meta V-JEPA 2:革命性的视频联合的世界模型
Meta推出V-JEPA2视频预测模型,通过自监督学习分析百万小时视频数据,构建世界模型理解物理规律。该模型基于联合嵌入预测架构(JEPA),在表示空间而非像素空间进行预测,专注于物体轨迹和因果关系。V-JEPA2在多个基准测试中表现优异,并在零样本机器人操作规划中实现65-80%成功率,效率提升15倍。项目代码和论文已在GitHub和arXiv公开。
1. 项目介绍
V-JEPA 2(Video Joint-Embedding Predictive Architecture 2) 是Meta AI在世界模型构建领域的重大突破,这是一个能够像人类一样理解、预测和规划的自监督视频模型。正如官方论文所述,该模型建立在深刻的认知学习理论基础之上:人类通过整合低级感官输入来表示和预测未来状态,从而学习世界的内部模型。
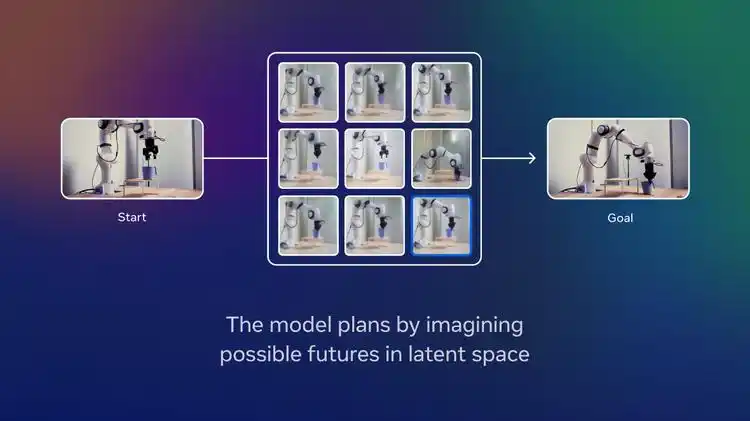
V-JEPA 2将这一理论转化为实际的技术实现,通过分析超过100万小时的互联网视频数据,建立起对物理世界的直觉理解。核心创新在于联合嵌入预测架构(JEPA),它通过在学习到的表示空间中进行预测,而非像传统方法那样在像素空间中操作。这种设计使得模型能够专注于学习物体轨迹、因果关系等可预测的物理规律,而不是纠结于无关的细节噪声。主要优势包括:
- 无需标注训练:通过自监督学习方式,在超过100万小时的视频数据上进行训练
- 世界模型构建:学会了"球掉下桌子不会消失"等从婴幼儿就具备的直观物理常识
- 零样本规划:能够在未见过的环境中预测一系列合理步骤并逐步实现目标
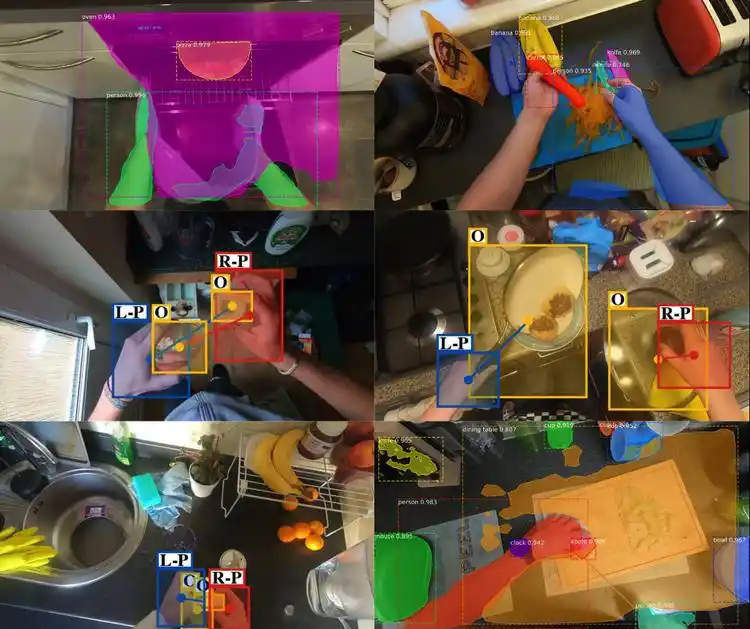
该模型在多个基准测试中取得了突破性成果:在Something-Something v2上达到77.3%的top-1准确率,在Epic-Kitchens-100人类动作预期任务上达到39.7的recall-at-5。更令人瞩目的是,V-JEPA 2-AC(Action-Conditioned)变体仅使用62小时未标注机器人视频进行微调,就实现了零样本机器人操作规划,在到达、抓取和拾取-放置等任务中取得了65-80%的成功率,执行效率比传统方法提升15倍。原始JEPA项目的完整代码实现可以在https://github.com/facebookresearch/jepa 找到,该仓库包含了核心算法的参考实现和详细的文档说明。V-JEPA 2的最新版本及其增强功能则可以在https://github.com/facebookresearch/vjepa2 获取,这里提供了更加优化的模型结构和训练脚本。对于理论背景和技术原理的深入理解,建议仔细阅读Meta AI发布的官方论文https://arxiv.org/pdf/2506.09985,该论文详细阐述了V-JEPA 2的设计思路、实验验证和性能分析。
2. 安装配置
2.1 环境要求
- Python 3.11+
- PyTorch 2.0+
- CUDA 11.8+(推荐)
- 至少16GB GPU内存(ViT-L模型)
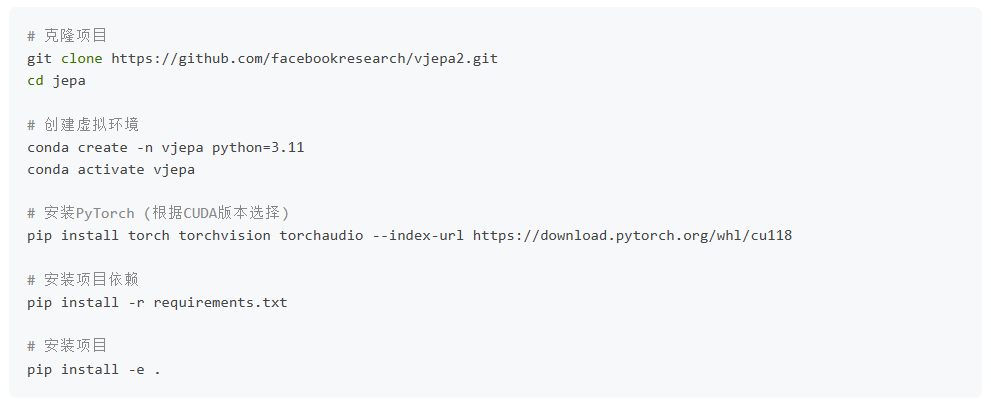
2.2 快速安装
3. 核心代码架构与创新详解
点击链接Meta V-JEPA 2:革命性的视频联合的世界模型阅读原文

立足具身智能前沿赛道,致力于搭建全球化、开源化、全栈式技术交流与实践共创平台。
更多推荐
 9
9 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)