中科院最新!WoTE:基于BEV世界模型的端到端自动驾驶~
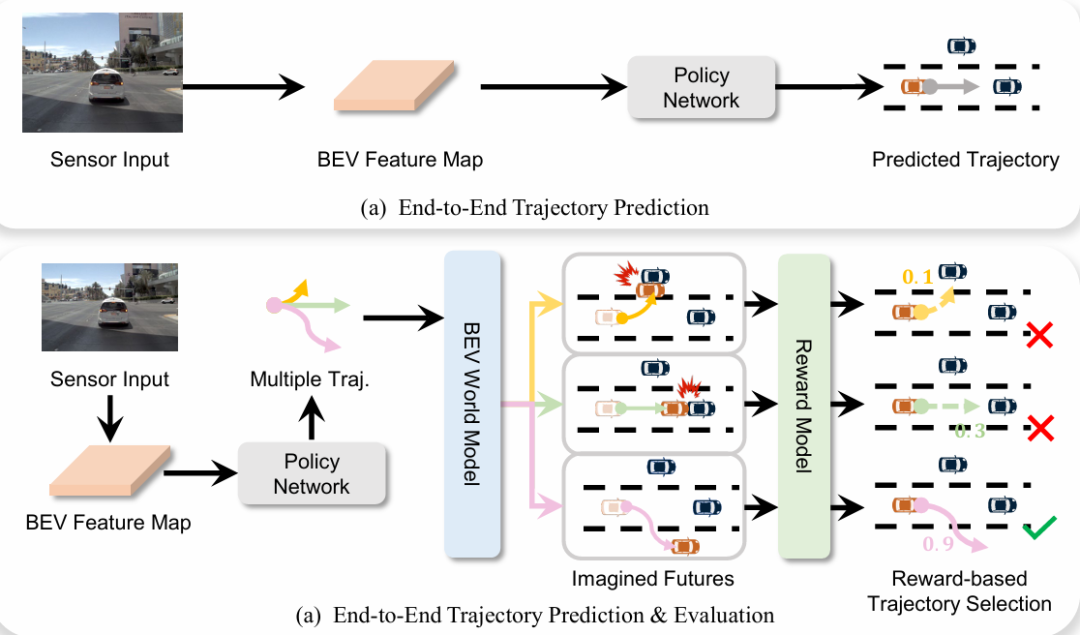
提出首个基于鸟瞰图(BEV)特征的端到端轨迹评估框架(WoTE),通过单步前馈预测未来BEV状态,相比传统图像级世界模型(如扩散模型)显著降低延迟。利用BEV语义地图的紧凑性,实现高效动态场景建模。设计基于K-Means聚类的轨迹锚点生成策略,结合交叉注意力机制实现多模态轨迹联合优化。通过轨迹编码器与BEV特征图的交互,同步完成多轨迹候选生成与场景动态预测。仿真奖励整合nuPlan模拟器的NC(无
点击下方卡片,关注“自动驾驶之心”公众号
End-to-End Driving with Online Trajectory Evaluation via BEV World Model
-
论文标题:End-to-End Driving with Online Trajectory Evaluation via BEV World Model
-
项目主页:https://github.com/liyingyanUCAS/WoTE
-
星球链接:https://t.zsxq.com/hOT8Z
核心创新点:
1. BEV空间世界模型架构
-
提出首个基于鸟瞰图(BEV)特征的端到端轨迹评估框架(WoTE),通过单步前馈预测未来BEV状态,相比传统图像级世界模型(如扩散模型)显著降低延迟。利用BEV语义地图的紧凑性,实现高效动态场景建模。
2. 多模态轨迹联合优化机制
-
设计基于K-Means聚类的轨迹锚点生成策略,结合交叉注意力机制实现多模态轨迹联合优化。通过轨迹编码器与BEV特征图的交互,同步完成多轨迹候选生成与场景动态预测。
3. 双模态奖励评估体系
创新性融合模仿奖励(imitation reward)与仿真奖励(simulation reward):
-
模仿奖励通过轨迹锚点与专家轨迹的L2距离计算
-
仿真奖励整合nuPlan模拟器的NC(无责碰撞)、DAC(可驾驶区域合规)、TTC(碰撞时间)、EP(自车进度)、Comfort五维度评估指标
采用加权策略实现安全与效率的动态平衡。
4. 闭环仿真监督范式
提出基于BEV语义地图的监督方案:
-
利用nuPlan等BEV空间交通模拟器生成未来状态真值
-
通过Focal Loss约束BEV语义地图预测
-
结合规则评估器实现奖励信号的端到端可微建模
有效解决多未来状态监督信号缺失的挑战。
本文均出出自『自动驾驶之心知识星球』硬核资料在星球置顶链接,加入即可获取:
-
行业招聘信息&独家内推;
-
自驾学习视频&资料;
-
前沿技术每日更新;




立足具身智能前沿赛道,致力于搭建全球化、开源化、全栈式技术交流与实践共创平台。
更多推荐

 0
0 0
0- 0



 已为社区贡献167条内容
已为社区贡献167条内容

所有评论(0)