具身智能的概念与实现
智能”局限于大脑内部处理。这一理念不仅重构了智能系统的结构设 计,也为 AI 在开放环境中实现更高层次的自主性与适应性提供了理论基础与技术路径。未来,具身智能有望在多场景、多任务、多智能体协同中释放出更强的泛化能力和进化潜力,推动 AI 迈入真正 “类人”认知的新阶段。
一、定义与内涵
具身智能打破了传统AI 将“智能”局限于大脑内部处理的范式,具身智能体能够通过与环境的 持续交互,实现信息采集、认知重构与策略演化的闭环过程。这一理念不仅重构了智能系统的结构设 计,也为 AI 在开放环境中实现更高层次的自主性与适应性提供了理论基础与技术路径。未来,具身智能有望在多场景、多任务、多智能体协同中释放出更强的泛化能力和进化潜力,推动 AI 迈入真正 “类人”认知的新阶段。
1. 基本概念
具身智能通过构建具有本体感知与行动能力的智能体,利用多模态传感器实时捕获环境状态,利用执行机构施加物理作用,并在连续时空维度中形成“感知 ‒ 认知 ‒ 决策 ‒ 行动”的闭环学习系统,从而实现对非确定性环境的动态建模与策略优化。
“具身”的含义并非单纯指代物理实体,而是与环境交互以及在环境中执行的整体需求和功能[5]。具身智能强调智能体在物理环境中身体与智能的相互依赖,主张智能不仅仅是大脑的产物,还包括身体与环境的互动。其核心观点是,智能行为不仅依赖于内部的信息处理能力,还取决于智能体的感知和行动能力,即通过感知环境并采取适当的行动来解决问题。
2. 具身学习与具身智能
认知根植于身体行动,经验建构于具身交互。从生物进化的角度来看,所有生物的智力活动都依赖于自身身体与环境的交互,通过积累具身经验,不断适应外部环境,从而在行为或行为潜能上产生积极且持久的变化,这一过程被称为具身学习[6]。具体而言,生物体的智能并非孤立存在,而是深受其身体形态及生存环境的影响。认知过程不仅涉及大脑的信息处理,还与物理、生理和心理三个元素相互耦合,形成动态的循环交互。因此,身体不仅是执行智能任务的工具,更是认知发展的核心组成部分。换言之,智能的演化并非单纯依赖“算法”的优化,而是“身体”与认知过程协同进化的结果。
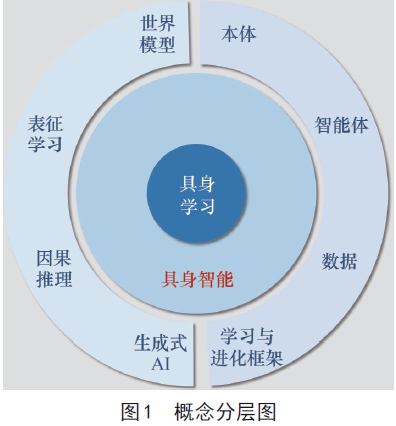
在AI 和机器人领域,具身学习这一理念进一步延伸为具身智能,即机器能够自主感知环境、学习、理解并采取适应性行动的能力,如图1 所示。通过与环境的持续交互,智能体能够动态调整自身策略,提升决策能力和适应性,从而实现更高级别的智能行为。这种基于身体 ‒ 环境交互的智能发展模式,需要基于认知科学、机器人学及AI 研究的共同发展,以此构建更具适应性和自主性的智能系统。
3. 具身智能与非具身智能
非具身智能方法通常采用“大规模无监督预训练+小样本有监督微调”的范式来训练神经网络,其核心依赖于大量样本和预设的固定模型进行训练和推理。然而,这种学习方法主要基于静态数据分布,可移植性、可扩展性差,只能在约束条件紧、工作对象少的简单环境下工作,难以模拟人类在“大脑 ‒ 身体”协作下对目标属性的动态感知和发现能力,因此无法实现具备自主进化能力的高级智能。
相比之下,具身智能方法可以通过在虚拟环境中训练大模型,以获取常识表征,并在具体应用场景中结合机器学习方法进行模型优化与进化。这一特性使得具身智能在应对复杂、未知、动态变化的场景时,展现出了更强的适应性和进化能力。
例如,在物体识别任务中,基于数据与模型驱动的物体识别方法在面对超出训练数据库范围的新目标时,往往难以适应变化,导致识别性能显著下降。这种局限性使得非具身智能在开放环境和未知场景中的应用受限。与之不同,具身智能不仅能够基于交互行为不断调整自身的识别策略,还能通过持续的环境感知和经验积累,动态适应新的目标和场景。
二、计算框架
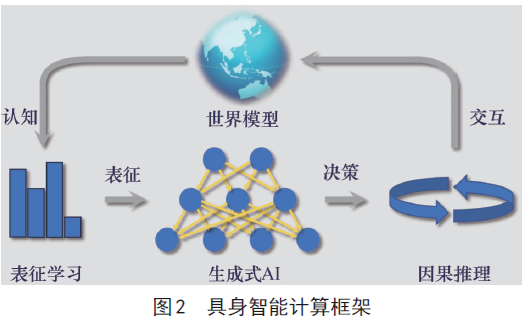
当前,具身智能正迈向多技术融合的发展阶段,它的实现依赖于世界模型、表征学习、因果推理和生成式AI 等AI 理论。世界模型提供环境模拟的结构基座,表征学习提升对信息的抽象与表达,因果推理实现从经验到理解的跃升,而生成式AI则构建起智能体与人类意图及动态环境的统一交互接口,其关系如图2所示。
1. 世界模型:构建认知框架
世界模型用于模拟和预测真实世界的运行规律,通过对物理、社会等环境特征、要素关系的抽象建模,构建出可表征环境动态变化的虚拟系统,无论是视觉场景、物理规则,还是人类行为逻辑,都能被编码进模型中,使其具备对未来状态的预测能力,这为具身智能提供了对环境的理解和预测基础,帮助智能体更好地决策和行动。
2. 表征学习:感知信息的语义化处理
表征学习是将原始数据转换为机器可计算的结构化、语义化数据的过程,其目标是通过自动发现和学习数据的有效特征或表示,降低数据复杂度,提升特征区分度,更好地支持后续的分类、预测、决策等机器学习任务。具身智能在与环境交互过程中产生海量原始数据,例如,传感器信号、视觉图像等,经表征学习能转化为可理解的语义特征,助力智能体快速认知环境、识别物体。同时,学习到的表征可优化智能体的决策和行动规划,而智能体的交互反馈又能不断调整表征学习策略,二者相互作用,推动具身智能高效感知与行动。
3. 因果推理:支撑高阶认知能力
因果推理是基于观测数据或实验干预,在复杂系统中剖析变量之间的因果逻辑,确定指定因素(因)对目标现象(果)产生实际、独立影响的分析过程,通过分析结果变量在其原因变量变化时发生的回应,确定事件或变量之间的因果关系,从而揭示事件背后的因果机制,实现从“关联认知”到“因果理解”的跨越。在具身智能中,因果推理是智能体理解世界的关键能力。智能体分析自身动作与环境反馈之间的因果联系,预判行为后果以优化决策。同时,基于因果推理构建的认知框架,助力智能体快速适应新环境、迁移知识,提升泛化能力。
4. 生成式AI:人机与环境交互的统一接口
近年来,以ChatGPT、SORA、DeepSeek等为代表的生成式AI 为具身智能计算框架带来变
革。生成式AI是一种基于海量数据和大规模参数的AI 技术,能够模拟人类的创造性思维,生成有一定逻辑性和连贯性的语言、文本、图像、音视频、程序等内容。生成式AI 具有强大的理解能力和生成能力,尤其是大语言模型(LLM),融合语言、视觉等多传感器输入的多模态大模(MLLM),以及正在演进的“信息 ‒ 物理 ‒认知”三域融合大模型(LIPCM)等利用了超大规模的训练数据并且包含大量参数,使其具备了超强的泛化能力与应用性能,这为具身智能的环境感知提供支撑,同时为具身智能的行动提供决策帮助。
基于生成式AI 的具身智能可分为两大部分,即人机交互和系统与环境的交互。在人机交互部
分,人以自然语言或图文信息的形式将任务需求输入到多模态大模型中,模型对不同形式的输入进行特征嵌入后,完成任务理解和概念推理,并生成知识和决策,最后由机器人生成面向任务指令的相应行为。在系统与环境交互部分,机器人首先利用自身传感器完成对情境的具身感知,然后根据大模型的学习结果,对情境产生行为,最终完成行为输出。需要指出的是,系统在将情境感知信息输入大模型之前,需要构建一个内部预测模型,在行动之前就能预测到结果。
三、系统实现
具身智能的系统实现是一个高度协同的工程体系,其包含本体、智能体、数据与学习框架四大核心要素。其中,本体保障执行力,智能体赋予认知力,数据提供驱动力,学习框架实现持续进化。随着模型能力跃升和任务复杂度上升,这一系统正朝向更高效、更泛化、更稳健的方向演进,未来在智慧工业、城市治理、人机协作等领域具备广泛应用前景。
1. 本体:智能落地的物理承载
具身智能的本体指代实际执行物理实体,承担在物理或虚拟环境中进行感知与任务执行的职能,例如四足机器人、复合机器人或人形机器人等。作为连接虚拟世界与物理世界的桥梁,本体需具备环境感知、运动控制与操作执行等基本能力,其能力边界直接制约了智能体任务完成的范围与水平。
2. 智能体:系统的决策与推理中枢
智能体作为物理本体的智慧核心,承担感知、解析、决策与操控等关键职能,理解复杂的环境结构及其语义内容,并与环境动态交互。随着深度学习技术的迅猛发展,当代智能体大多数由深度神经网络模型驱动,特别是语言大模型、MLLM等为智能体提供了更强的环境理解与推理能力。
3. 数据:驱动智能进化的“燃料”
为了广泛适应复杂多变的环境和任务,智能体所依赖的深度神经网络模型的规模正在不断增大,这些模型对于数据的渴求也愈发强烈。对于具身智能来说,场景的复杂性和多样性使得所需处理的环境和任务更加多变,这涉及到围绕复杂任务链的规划、决策和控制数据。特别是,针对特定行业场景的高质量数据,将成为具身智能在未来成功应用和实施的关键支柱。
4. 学习进化框架:实现适应与迁移的机制
学习进化框架通过智能体与物理世界的互动,逐步实现对新环境的适应、对新知识的吸收以及对解决问题能力的不断增强。在初期阶段,利用虚拟仿真环境进行高效学习是一种行之有效的策略,但现实世界的复杂性远超仿真环境。因此,如何实现虚拟与现实环境之间的高效知识迁移,已成为智能体架构设计中不可或缺的一环,该问题的解决将直接影响智能体在真实世界中的表现与适应能力。

立足具身智能前沿赛道,致力于搭建全球化、开源化、全栈式技术交流与实践共创平台。
更多推荐

 29
29 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)