
灵巧手通用操作指南:开启具身智能新纪元
摘要 灵巧手技术正推动机器人操作能力迈向新高度。机械硬件设计呈现四大流派:绳驱动系统实现轻量化仿生设计,如Shadow Hand;连杆传动提供高精度刚性;电机直驱简化结构提升响应;新材料驱动开辟仿生新路径。触觉感知技术突破显著,视触觉传感器通过高分辨率形变检测实现精细触觉;磁场式传感器具备抗干扰优势;传统压阻式传感器持续优化。人工智能算法成为控制核心,强化学习让机器人自主探索复杂操作;模仿学习通过
0. 引言:机器人灵巧操作的技术革命
在人工智能发展的浪潮中,具身智能正成为下一个技术制高点。而在具身智能的技术版图中,灵巧手无疑是皇冠上最璀璨的明珠。当我们看到波士顿动力的机器人能够跑跳翻滚,特斯拉的Optimus在展示会上倒水泡茶,OpenAI的机器人手臂玩转魔方时,我们不禁感叹:机器人正在以前所未有的速度接近人类的操作灵巧性。

灵巧手技术之所以如此重要,是因为它代表了机器人与物理世界交互的最高形态。与传统的工业机械臂或简单夹爪不同,灵巧手拥有多个自由度、精细的力控能力和丰富的触觉感知,能够完成抓取、操作、递物等复杂动作。这种能力不仅仅是技术的炫技,更是通向通用人工智能的必经之路。
1. 机械硬件设计的技术演进
1.1 驱动系统的四大流派
灵巧手的机械设计是整个系统的基石,不同的驱动方式决定了灵巧手的性能边界和应用场景。经过数十年的发展,业界形成了四大主要技术流派。
绳驱动系统:轻量化的艺术
绳驱动灵巧手堪称是机械设计的艺术品。这种设计将电机置于手掌或前臂位置,通过柔性绳索传递动力到手指关节。Shadow Robot公司的Dexterous Hand系列是这一技术的集大成者,其24自由度的设计让机器人手指能够做出几乎所有人类手指的动作。
绳驱系统的核心优势在于重量分布的优化。想象一下人类的手臂结构:强有力的肌肉位于前臂,通过肌腱将力量传递到手指。绳驱动灵巧手正是模仿了这种生物学原理。电机的重量不会增加手指的负担,使得整个手部更加轻盈灵活。
然而,绳驱动系统也面临着独特的技术挑战。绳索的弹性变形、磨损老化以及非线性传动特性都需要复杂的控制算法来补偿。特斯拉在其Optimus Gen3中采用的超高分子量聚乙烯纤维(UHMWPE)腱绳就是为了解决传统绳索的耐久性问题。
连杆传动:精度与刚性的平衡
连杆传动系统通过刚性连杆组合实现力和运动的传递,这种方案在精度要求极高的应用中表现卓越。连杆系统又可细分为串联和并联两种拓扑结构。
串联连杆如因时机器人的RH56系列,采用欠驱动设计,6个自由度驱动12个运动关节。这种设计的巧妙之处在于用较少的电机实现了丰富的抓取模式,特别适合工业应用中的标准化操作。
并联连杆设计则以ILDA并联杆灵巧手为代表,通过并联机构实现了高刚性和高精度的力传递。这种设计在需要大力输出的场景中优势明显,但结构复杂度相对较高。
电机直驱:简洁高效的选择
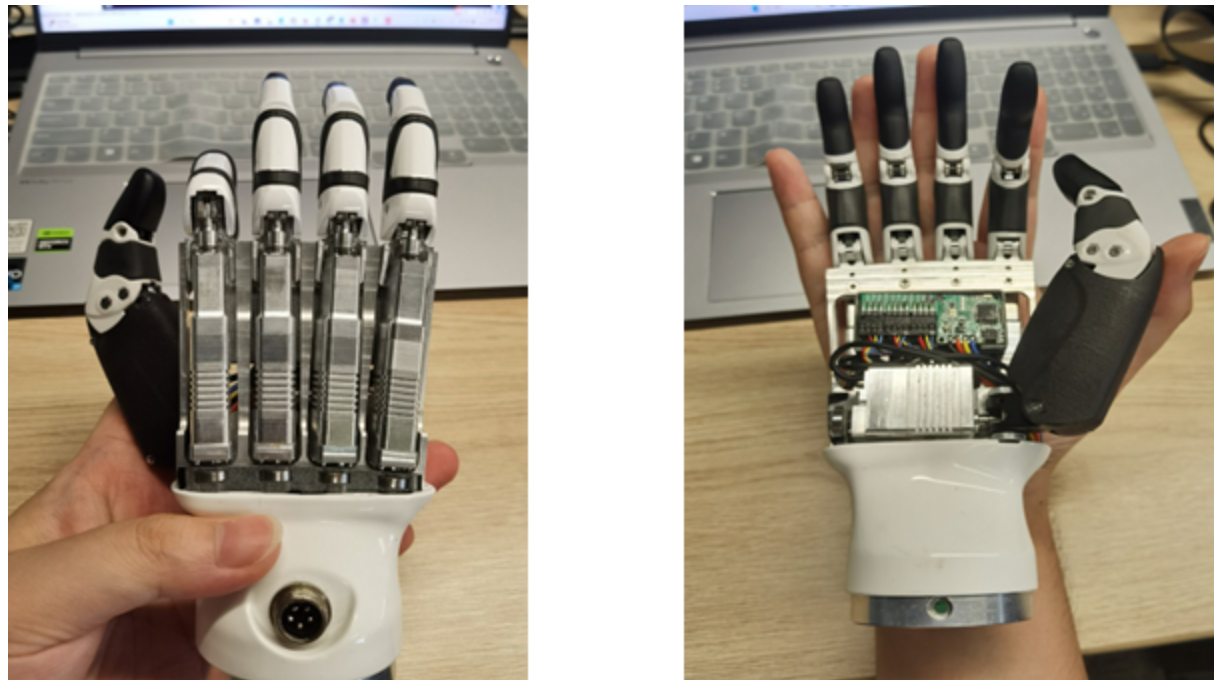
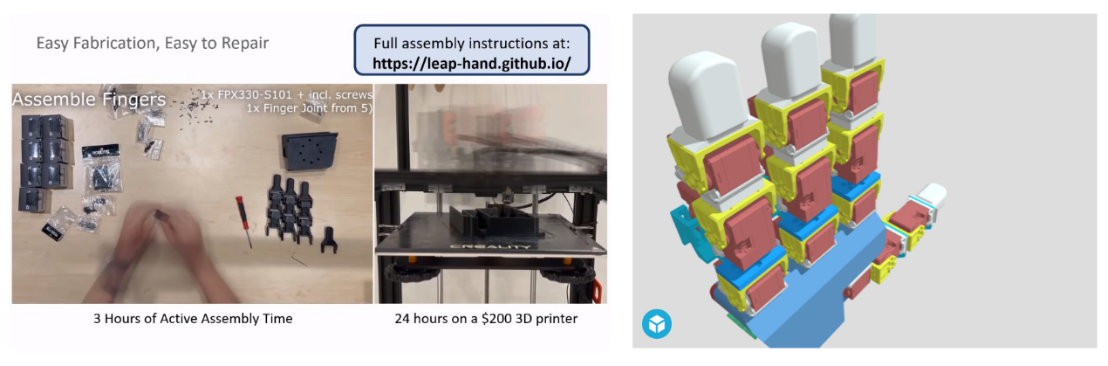
电机直驱方案将微型电机直接安装在关节附近,省去了中间传动环节。LEAP HAND开源项目很好地展示了这种设计的优势:响应速度快、控制精度高、结构相对简单。
宇树科技的Dex5灵巧手采用了独创的反向驱动技术,20个自由度配合94个灵敏触点,在保持高性能的同时将功耗控制在10W以内。这种设计理念特别适合需要长时间连续工作的服务机器人场景。

新材料驱动:仿生学的突破
新材料驱动技术代表了灵巧手发展的前沿方向。形状记忆合金(SMA)、液晶弹性体(LCE)和气压驱动等技术正在开辟全新的可能性。
伯牙智能开发的SMA驱动假肢灵巧手重量仅370g,接近真实人手重量,展示了新材料在医疗康复领域的巨大潜力。而哈佛大学Robert Wood团队的3D打印柔性充气结构则实现了高度仿生的抓取动作,为软体机器人技术开辟了新的道路。
1.2 商业化产品的技术竞争格局
当前灵巧手市场呈现出百花齐放的态势。从技术路线来看,国外产品如Shadow Hand专注于高精度科研应用,价格超过10万美元;国内企业则更注重成本控制和产业化应用,如灵巧智能的DexHand021将价格控制在更合理的区间内。
从应用场景来看,工业自动化仍然是最大的市场,但医疗康复、服务机器人等新兴领域正在快速增长。帕西尼感知的DexH13已经在地铁安检等特殊环境中实现商业化部署,展示了灵巧手技术的实用价值。
2. 触觉感知的技术革命
2.1 视触觉传感器:机器人的"触觉眼睛"
如果说机械结构是灵巧手的骨骼,那么传感器就是它的神经系统。在各种触觉传感技术中,视触觉传感器无疑是最具革命性的创新。
视触觉传感器的工作原理类似于人类的指尖感知:当弹性接触膜与物体接触时产生形变,内置的高分辨率摄像头捕捉这种形变,然后通过图像处理算法解析出物体的表面纹理、材质特性和受力分布。这种技术最早由MIT的GelSight项目提出,现在已经发展出多个变种。

清华大学开发的9DTact传感器是视触觉技术在国内的重要突破。这个开源项目不仅提供了完整的技术方案,还在B站发布了详细的制作教程,大大降低了技术普及的门槛。9DTact能够同时感知力、扭矩和接触几何,为灵巧操作提供了丰富的触觉信息。
MIT最新的GelPalm传感器将空间分辨率提升到0.1mm级别,力感知精度提升了50%。这种性能的提升使得机器人能够感知到纸张的厚度差异,甚至是硬币表面的纹理特征。
技术挑战与解决方案
视触觉传感器面临的主要挑战是计算复杂度和实时性的平衡。每秒处理几十帧高分辨率图像并提取触觉信息,对计算资源提出了很高要求。研究者们正在开发专用的AI芯片和优化算法来解决这个问题。
另一个挑战是弹性膜的耐久性。频繁的接触和形变会导致材料疲劳,影响传感精度。新型硅胶材料和表面涂层技术正在不断改进这一问题。
2.2 磁场式传感器:抗干扰的新选择
磁场式触觉传感器利用磁感应原理实现力觉测量,具有抗电磁干扰能力强、测量范围大、耐久性高等优势。香港科技大学申亚京团队开发的超分辨率触觉软磁传感器实现了毫牛级的力测量精度,响应频率超过500Hz。
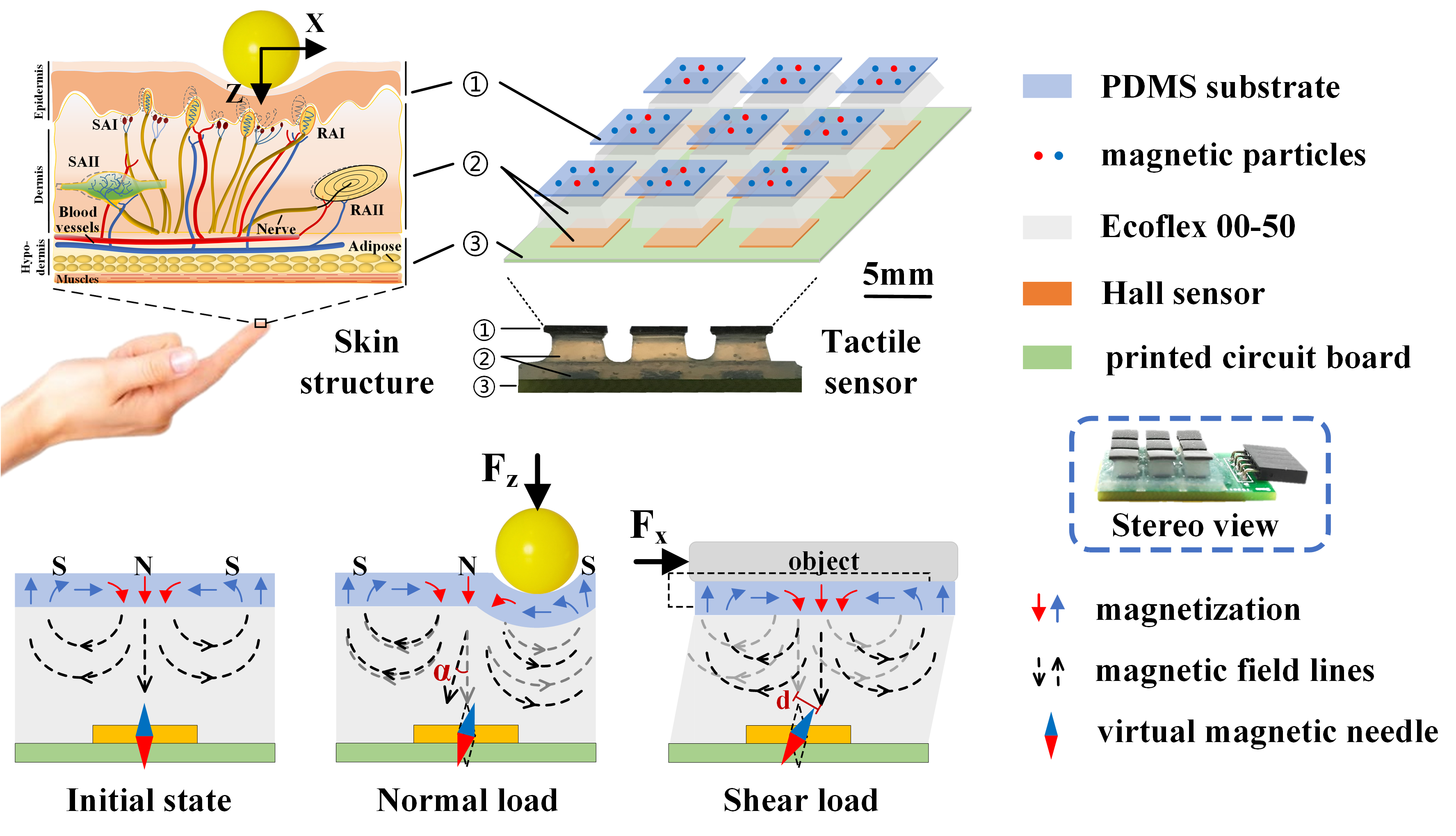
这种传感器的核心创新在于磁膜结构的优化设计。通过精心设计的磁场分布,实现了三维力的自解耦测量,将系统校准复杂度从传统的O(n³)降低到O(3n)。这种设计特别适合在强电磁环境下工作,如工业焊接、电子制造等场景。
2.3 压阻式传感器:成熟可靠的基础选择
压阻式传感器虽然技术相对传统,但因其结构简单、成本低廉、响应快速等优势,仍然是灵巧手应用中的重要选择。现代压阻式传感器通过新材料和新工艺不断改进性能。
碳纳米管、石墨烯等新型导电材料的应用显著提升了传感器的灵敏度和稳定性。柔性基板技术使得传感器可以更好地贴合手指表面,获得更自然的触觉感知。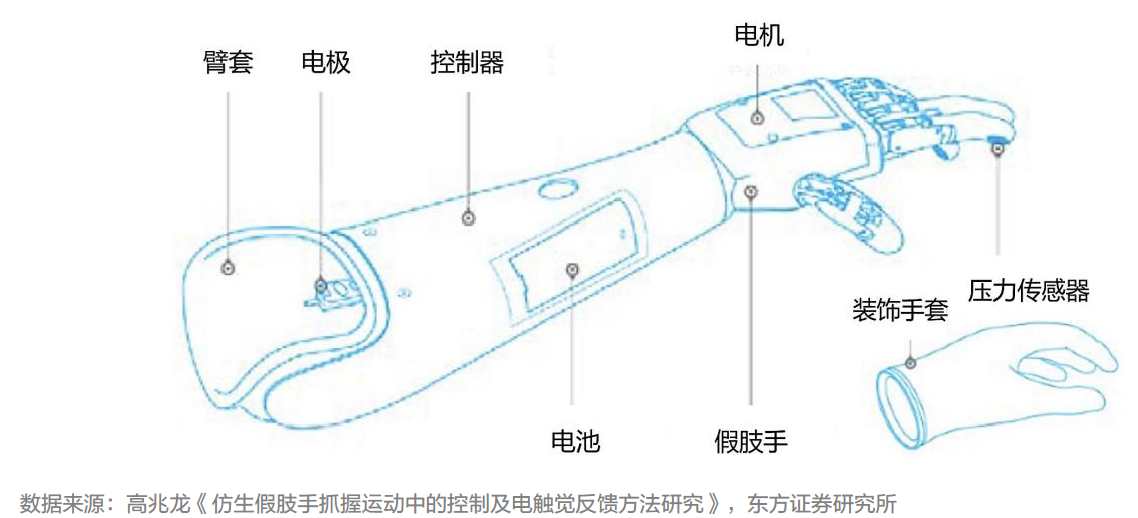
3. 人工智能驱动的控制算法
3.1 强化学习:让机器人自主探索操作技巧
强化学习在灵巧手控制中的应用代表了AI技术的重要突破。不同于传统的基于模型的控制方法,强化学习使机器人能够通过试错学习来掌握复杂的操作技巧。
OpenAI的机器人魔方项目是强化学习在灵巧操作中的经典案例。通过在仿真环境中数百万次的试验,机器人学会了用Dexterous Hand完成魔方的各种操作,包括复杂的指间旋转和精确的位置控制。这个项目展示了强化学习在处理高维动作空间和复杂接触动力学方面的强大能力。

核心算法技术
近端策略优化(PPO)算法是当前灵巧手强化学习中应用最广泛的方法。PPO通过限制策略更新的幅度,在学习效率和稳定性之间找到了良好的平衡。在灵巧手操作中,PPO能够有效处理连续动作空间和稀疏奖励信号的挑战。
Soft Actor-Critic(SAC)算法在样本效率方面表现出色,特别适合需要与真实硬件交互的场景。SAC的最大熵框架鼓励策略的探索性,这对于发现创新的操作策略特别有价值。
Sim-to-Real技术突破
强化学习面临的最大挑战是仿真到现实的迁移。Domain Randomization技术通过在训练过程中随机化仿真参数,提高了策略的鲁棒性。研究表明,经过充分随机化训练的策略能够很好地适应真实环境中的不确定性。
3.2 模仿学习:从人类示范中学习
模仿学习为灵巧手控制提供了更直接的学习路径。通过观察人类的操作示范,机器人可以快速获得合理的初始策略,然后通过进一步的优化来提升性能。
数据采集技术的革新
高质量的示范数据是模仿学习成功的关键。传统的遥操作数据采集方法面临成本高、效率低的问题。VR技术的发展为这一问题提供了新的解决方案。
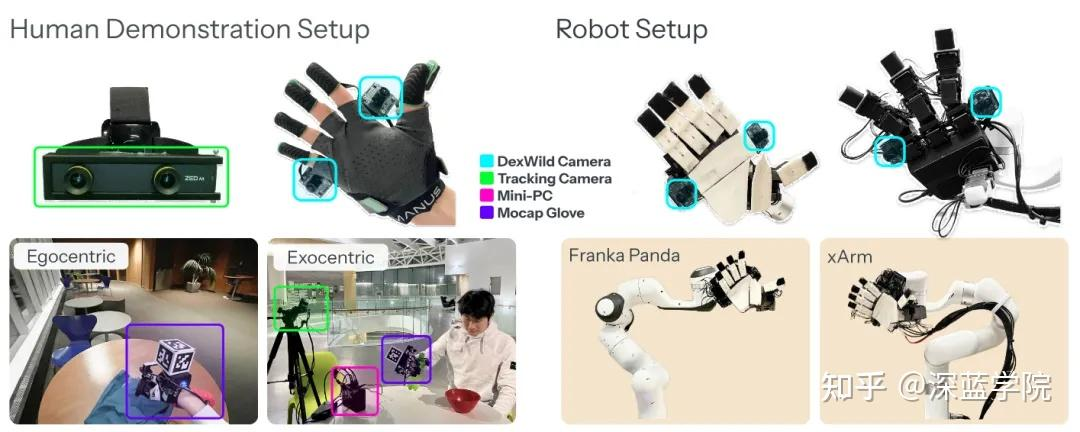
斯坦福大学的DexWild项目开发了一套低成本、便携式的数据采集系统,能够大规模采集人类灵巧操作数据。这套系统使用普通的VR头盔和手势追踪设备,成本不到1000美元,却能获得高质量的操作演示数据。
从视频学习的技术前沿
最近的研究开始探索从网络视频中学习灵巧操作技能。DexVIP项目利用人类手部姿态先验知识,能够从YouTube等平台的视频中提取有用的操作信息。这种方法的优势是数据来源丰富,成本几乎为零,但技术挑战也更大。
3.3 VLA大模型:通用智能的新范式
视觉-语言-动作(VLA)大模型代表了灵巧操作研究的最新方向。这类模型能够理解自然语言指令,观察环境状态,并生成相应的机器人动作。
英伟达GR00T的技术架构
英伟达最新发布的GR00T N1模型采用了快慢融合的系统架构。快速模型负责实时的动作控制,响应时间在毫秒级;慢速模型负责高层的任务规划和语言理解,能够处理复杂的多步骤任务。
这种架构设计巧妙地平衡了实时性和智能性的要求。在执行"请帮我整理桌面"这样的复杂指令时,慢速模型会将任务分解为"识别物品-分类整理-放置归位"等子任务,快速模型则负责执行具体的抓取和放置动作。
多模态融合的技术挑战
VLA模型面临的核心挑战是如何有效融合视觉、语言和动作等不同模态的信息。现有的研究主要采用注意力机制和交叉模态对齐技术来解决这个问题。
灵初智能的DexGraspVLA模型在这方面做出了重要贡献。该模型通过迭代式的表示学习,将多样化的语言和视觉输入转换为领域不变的表示,显著提高了模仿学习的鲁棒性。
4. 开发生态系统的完善
4.1 仿真平台:虚拟世界中的真实物理
灵巧手算法的开发离不开高质量的仿真环境。现代仿真平台不仅要提供准确的物理建模,还要支持大规模并行训练和高保真度渲染。
NVIDIA Isaac Sim的生态优势
NVIDIA Isaac Sim基于Omniverse平台构建,提供了业界最先进的仿真能力。其最大的优势在于完整的生态系统支持:从资产库到训练框架,从渲染引擎到部署工具,形成了闭环的开发流程。
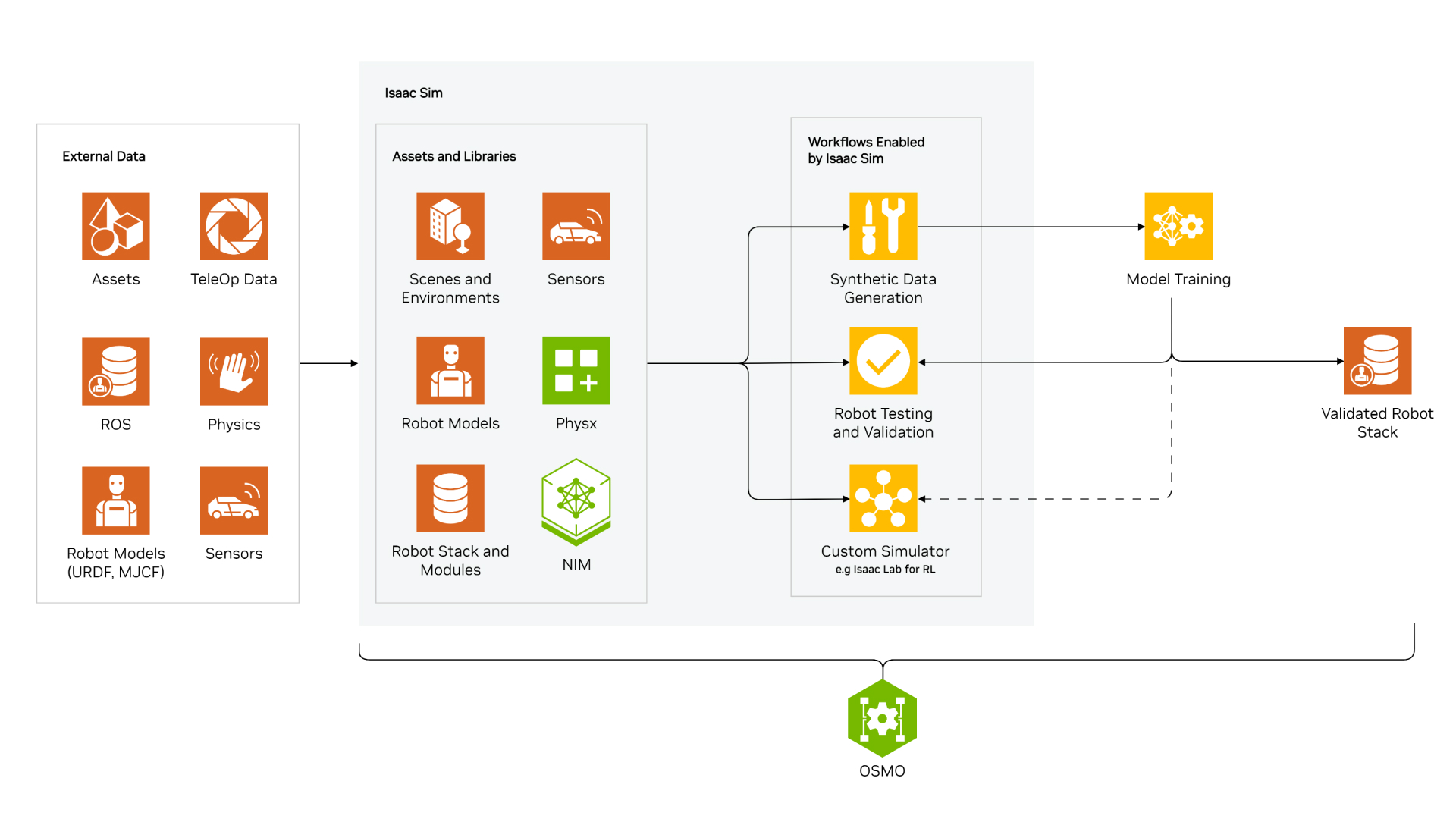
Isaac Sim的实时光线追踪技术能够生成照片级真实的图像,这对于基于视觉的灵巧操作算法训练至关重要。更重要的是,其GPU加速的物理仿真能够支持数千个并行环境,大大提高了强化学习的训练效率。
MuJoCo的精确物理建模
MuJoCo虽然在渲染效果上不如Isaac Sim,但在物理仿真的精确性方面表现卓越。其高精度的接触建模和稳定的数值求解器使得它成为科研领域的首选。
MuJoCo最新版本引入了可微分仿真功能,这为基于梯度的优化方法开辟了新的可能。研究者可以直接对仿真参数进行梯度下降优化,大大提高了系统设计和参数调整的效率。
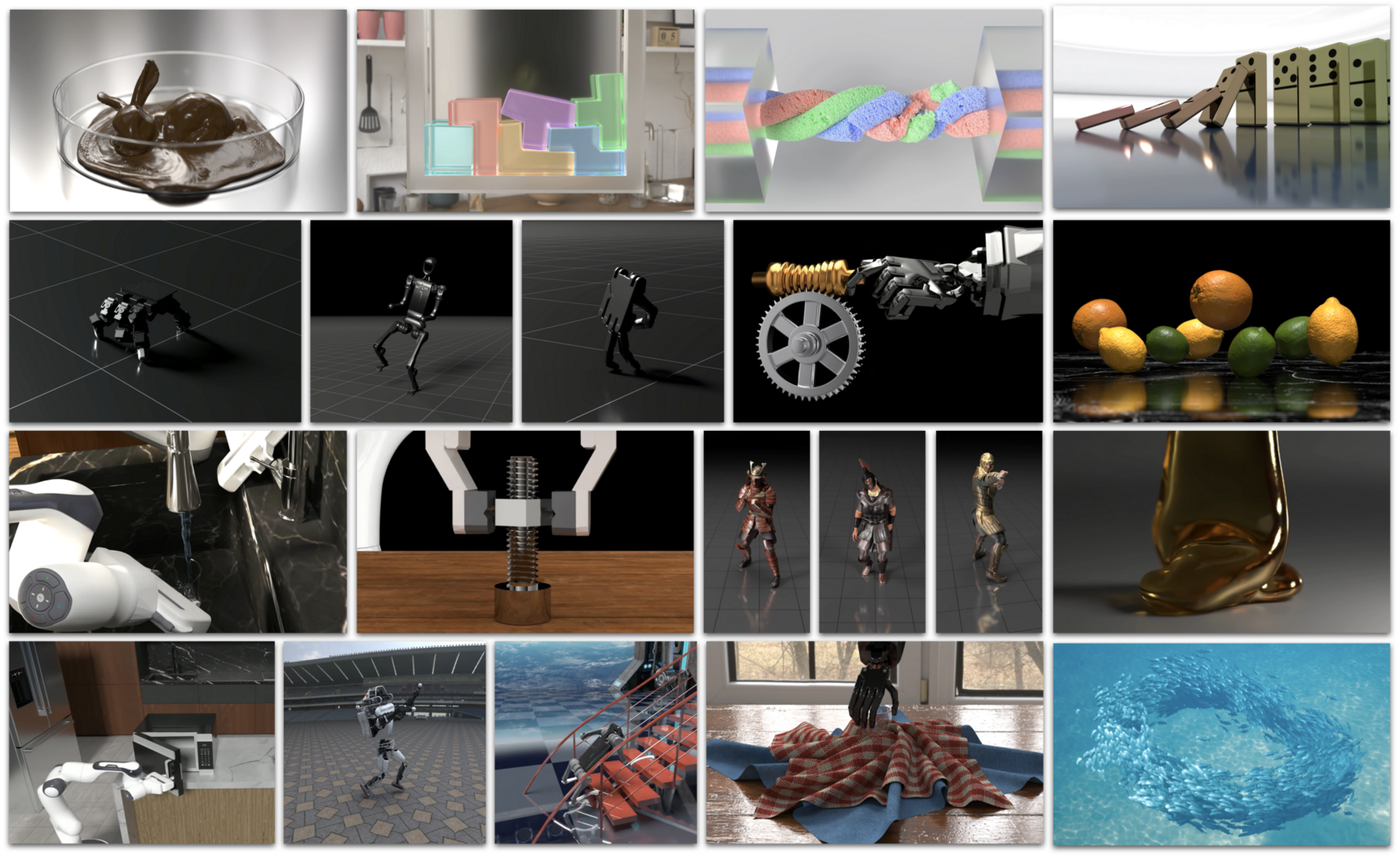
Genesis:新兴的通用平台
Genesis是专为具身AI打造的新一代仿真平台,其最大特点是端到端的可微分设计。这种设计理念使得整个仿真过程都可以参与到神经网络的训练中,为AI算法的发展提供了新的工具。
Genesis在柔性物体和触觉仿真方面具有独特优势,这正是灵巧手应用中的关键需求。其轻量化设计也使得个人开发者能够在普通硬件上进行复杂的仿真实验。
4.2 数据集与基准测试
标准化数据集的重要性
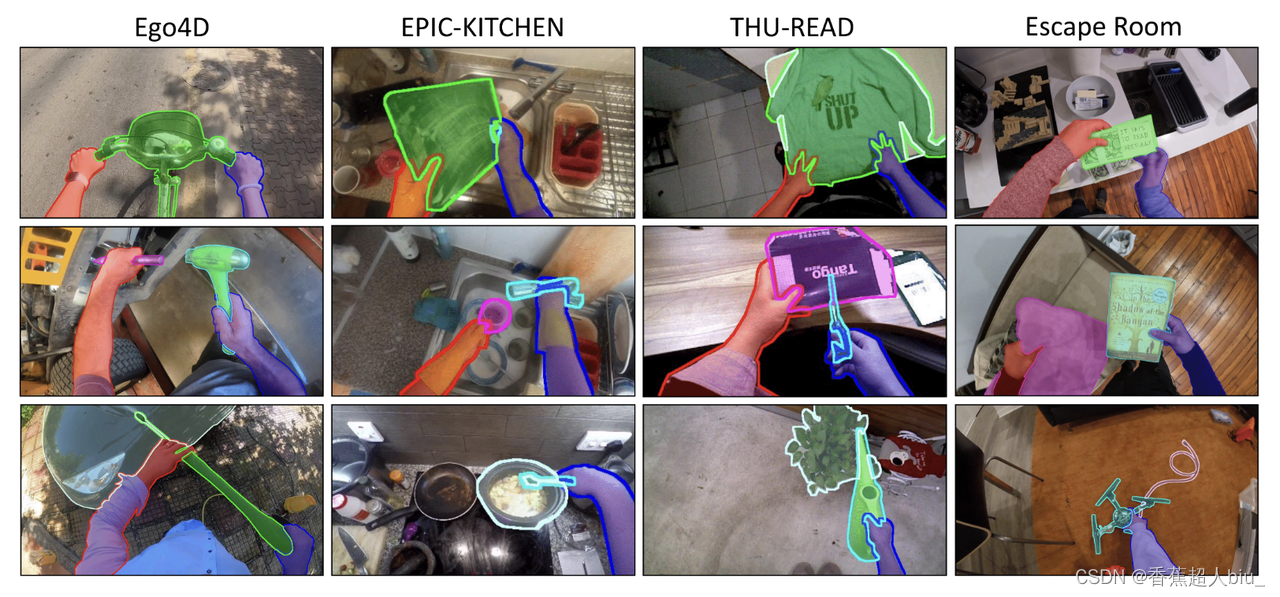
灵巧手领域的发展需要标准化的数据集和评估基准。DexManipNet项目整理了多种Human-Object交互数据,并将其迁移到各种灵巧手平台上,为算法对比提供了统一的基础。
ARCTIC数据集包含210万帧视频,记录了双手操作铰接物体的过程,提供了精确的3D手部和物体网格数据。这种大规模、高质量的数据集为深度学习算法的训练提供了重要支撑。
基准测试的挑战
与计算机视觉等领域不同,灵巧手操作的评估面临更大的挑战。操作的成功不仅依赖于最终结果,还需要考虑过程的稳定性、效率和安全性。
DexArt基准测试平台专注于灵巧手对铰接物体的操作,支持多任务学习和点云感知。这种综合性的评估方法更好地反映了算法在实际应用中的表现。
4.3 URDF建模与标准化
URDF的生态地位
统一机器人描述格式(URDF)已经成为机器人建模的事实标准。几乎所有主流的仿真平台都支持URDF格式,这为算法的跨平台开发提供了便利。
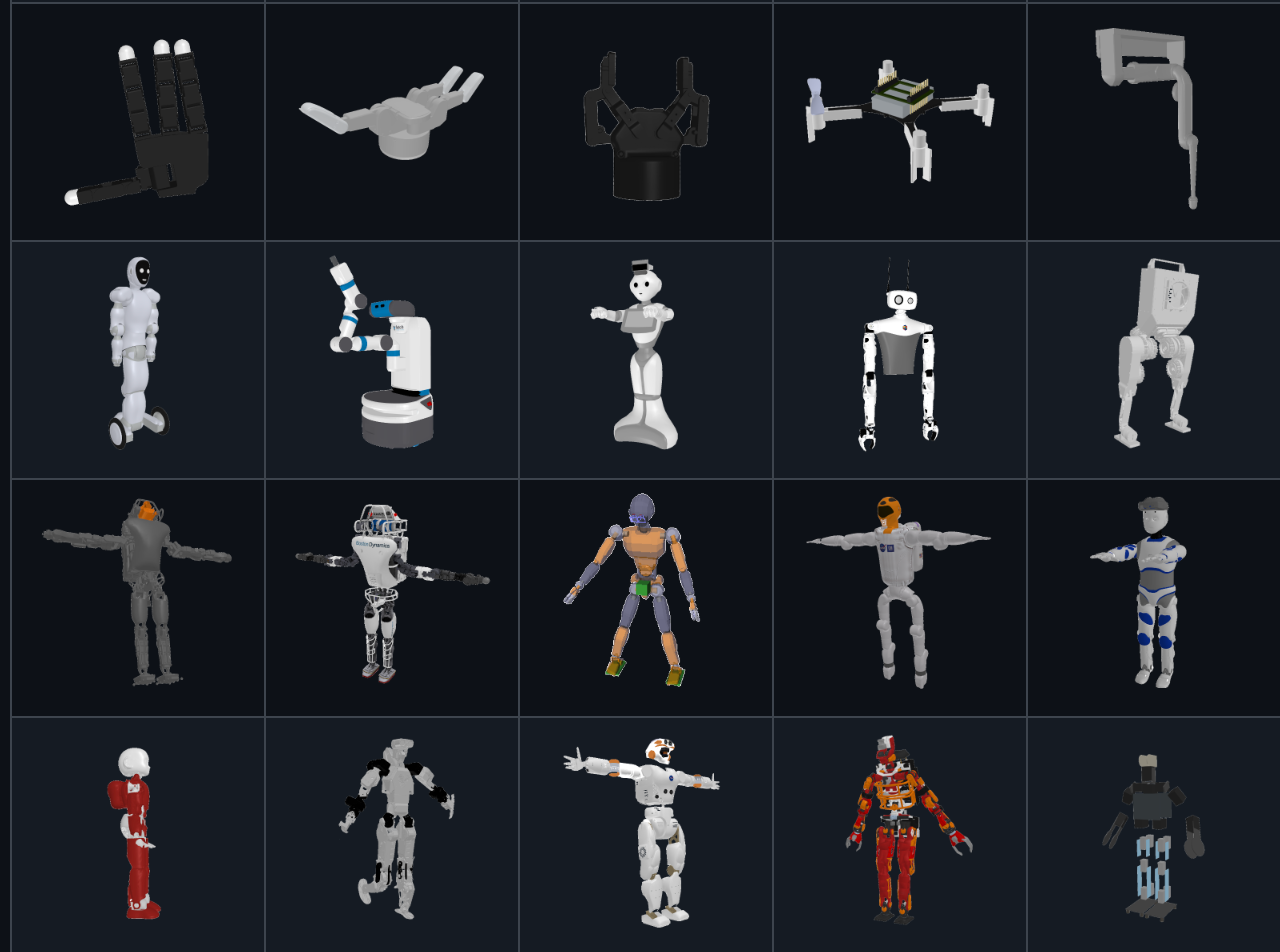
Understanding URDF论文建立了包含300+机器人模型的开源数据库,为研究者提供了丰富的模型资源。这个数据库不仅包含模型文件,还提供了详细的技术文档和使用指南。
模型质量与标准化
高质量的URDF模型需要在几何精度、物理参数和计算效率之间找到平衡。现代建模工具支持多层次细节(LOD)技术,可以根据应用需求选择合适的精度级别。
碰撞检测通常使用简化的几何模型以提高计算效率,而可视化则使用高精度模型以获得更好的视觉效果。这种分层设计理念在灵巧手建模中特别重要,因为手指的复杂结构需要精细的几何描述。
5. GaiaHand开源项目深度解析
GaiaHand微型关节模组开源灵巧手代表了开源硬件在灵巧手领域的重要突破。这个项目的核心理念是通过模块化设计降低技术门槛,让更多的研究者和爱好者能够参与到灵巧手技术的开发中来。
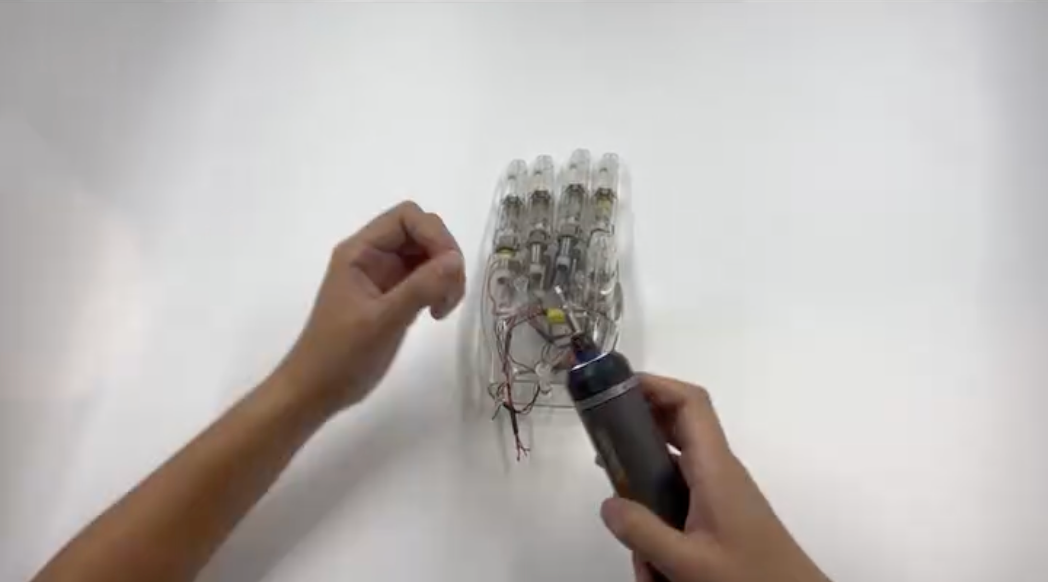
模块化设计的技术优势
GaiaHand的每个关节模组都是一个独立的功能单元,包含驱动器、传感器和控制电路。这种设计带来了多重优势:
首先是灵活性。用户可以根据具体应用需求自由组合关节数量和配置方案。三指抓手、四指灵巧手或者仿人五指手都可以用相同的关节模组构建。
其次是可维护性。当某个关节出现故障时,只需要更换对应的模组,而不需要拆解整个手部结构。这大大降低了维护成本和复杂度。
最后是成本控制。模块化生产能够实现规模效应,降低单个模组的制造成本。同时,用户可以根据预算逐步添加关节模组,实现渐进式升级。
关键技术指标
GaiaHand的技术指标体现了开源项目在性能和成本之间的精心平衡:
- 单关节扭矩:0.5-1.2 Nm
- 角度分辨率:0.1°
- 响应频率:50 Hz
- 通信接口:CAN总线
- 供电电压:12V
- 单模组重量:45g
这些指标虽然不如顶级商业产品,但对于教育、研究和初级应用已经完全够用。更重要的是,开源的设计允许用户根据需要进行定制和改进。
6. 数据采集技术的创新与实践
6.1 VR遥操作:沉浸式数据采集的新范式
虚拟现实技术为灵巧手数据采集带来了革命性的改变。传统的数据采集方法往往需要昂贵的专业设备和复杂的标定过程,而VR技术让这一切变得简单直观。
Apple Vision Pro的技术突破
Apple Vision Pro凭借其先进的手势追踪技术,为灵巧手数据采集开辟了新的可能。其内置的多摄像头系统能够以毫米级精度追踪手部动作,追踪频率达到90Hz,完全满足实时控制的需求。
EgoDex项目利用Vision Pro采集了大量自我中心视角的灵巧操作数据。这种第一人称视角的数据特别有价值,因为它更好地反映了人类操作时的注意力分布和决策过程。

开源VR解决方案
对于预算有限的研究团队,开源的VR解决方案提供了经济实惠的选择。OPEN TEACH项目基于Meta Quest 3构建了完整的遥操作系统,成本不到1000美元,却能实现专业级的功能。
这套系统支持多种机器人平台,包括多指手、双臂系统和移动机械手。其模块化的软件架构使得适配新的硬件平台变得相对简单。
力反馈技术的集成
单纯的视觉追踪无法提供触觉反馈,这限制了操作的精度和自然性。Bunny-VisionPro项目通过集成触觉传感器,为操作者提供实时的力反馈信息。
这种多模态的反馈机制显著提升了操作的成功率和自然性。研究表明,有力反馈的遥操作系统在精细操作任务中的成功率比纯视觉系统高出40%以上。
6.2 数据手套:精确捕捉手部动作
数据手套通过直接测量手指关节角度来获取操作数据,这种方法的优势是精度高、延迟低。现代数据手套集成了多种传感技术,包括弯曲传感器、惯性测量单元和光学追踪系统。
Manus MetaGloves的技术特点
Manus MetaGloves Pro是目前市场上最先进的数据手套之一,能够追踪30个自由度的手部动作,精度达到2°以内。其无线设计和长续航能力使得长时间数据采集成为可能。
这套系统的核心创新在于传感器融合算法。通过结合惯性传感器、弯曲传感器和光学追踪的数据,系统能够在各种环境条件下保持稳定的追踪性能。

低成本解决方案
斯坦福大学张寒博士开发的外骨骼数据手套为低成本数据采集提供了新的思路。这套系统采用机械连杆结构直接测量关节角度,避免了传统传感器的漂移和标定问题。
DexWild项目进一步降低了成本门槛,其便携式系统仅需几百美元即可搭建,但能够获得高质量的操作演示数据。这种低成本方案对于推广灵巧手技术具有重要意义。
6.3 外骨骼系统:力感知与精确控制
外骨骼系统不仅能够捕捉手部动作,还能提供主动的力反馈,这为高精度的遥操作提供了可能。现代外骨骼系统正朝着轻量化、高精度和低成本的方向发展。
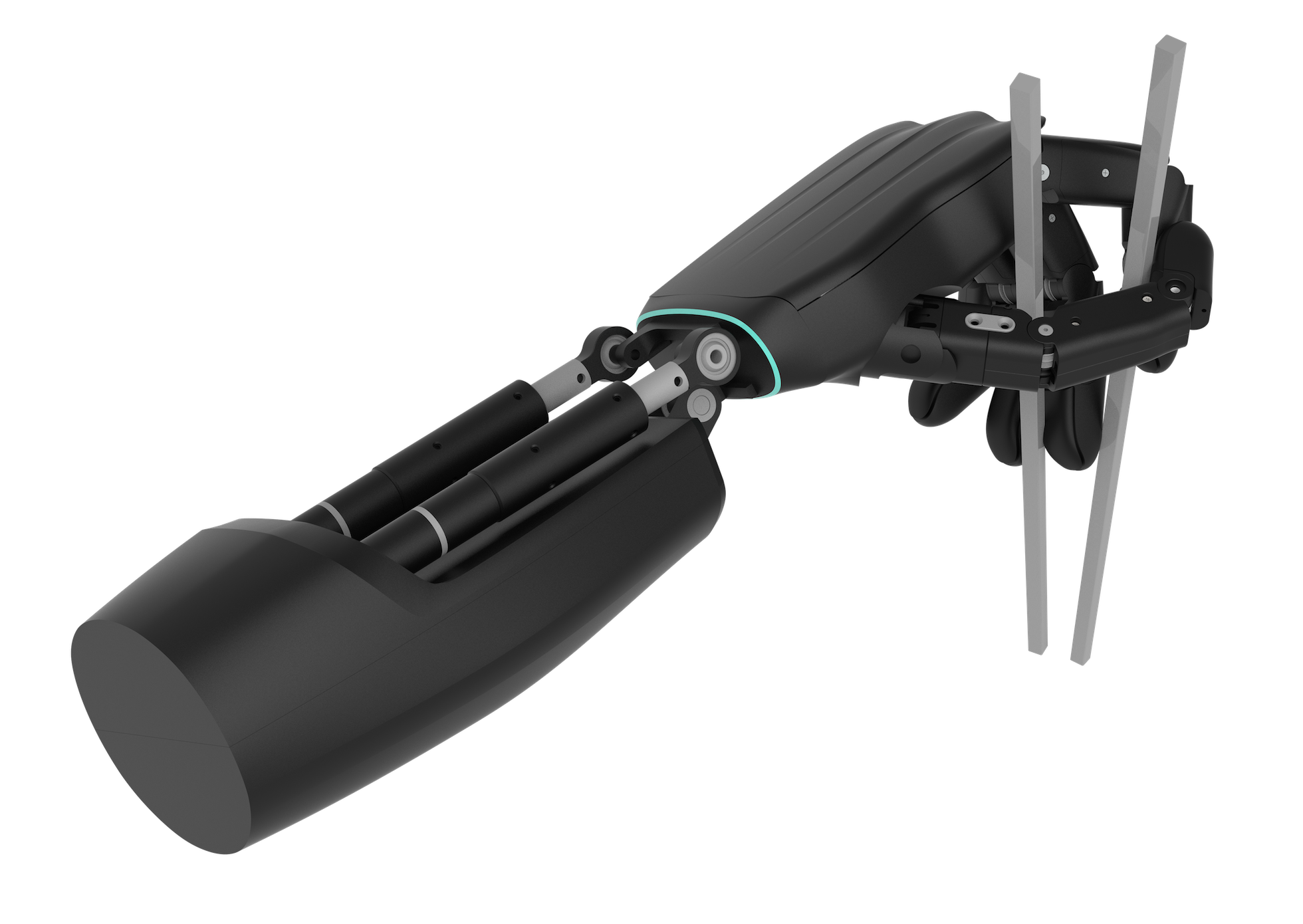
因时机器人的力控手套
因时机器人开发的外骨骼力控手套集成了5个直线伺服驱动器,每根手指可以提供3N的主动力和5N的被动力。这种力反馈能力使得操作者能够感受到物体的硬度、重量和表面纹理。
系统采用蓝牙4.0通信,延迟控制在10ms以内,满足实时操作的需求。内置的压力传感器能够检测操作者的意图,实现自然的人机交互。
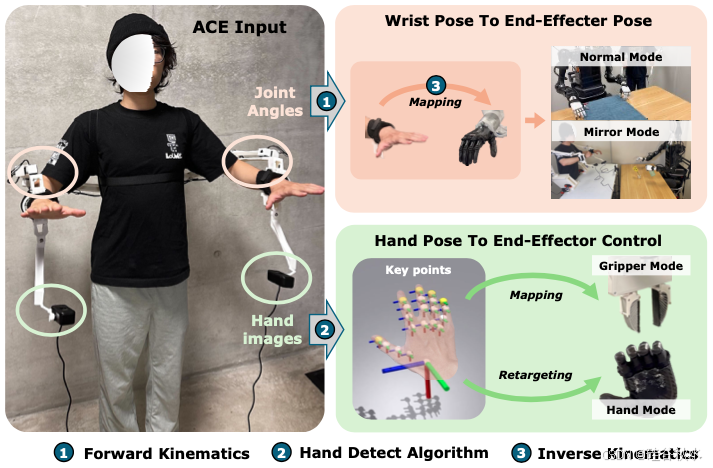
ACE系统的视觉融合
ACE(Active Camera Exoskeleton)系统采用了创新的视觉-外骨骼融合方案。通过面向手部的摄像头捕捉3D手部姿势,结合外骨骼的精确测量,实现了高精度的手部追踪。
这种融合方案的优势在于能够处理外骨骼无法覆盖的手部区域,如指尖位置和手腕旋转。同时,视觉信息还能用于验证外骨骼测量的准确性。
7. 商业化应用与市场前景
7.1 工业自动化的技术需求
灵巧手在工业自动化领域的应用正在快速增长。与传统的刚性夹爪相比,灵巧手能够处理更复杂的操作任务,适应更多样的产品形态。
汽车制造业的应用案例
在汽车制造领域,星动纪元的模块化灵巧手已经在特斯拉等头部企业中得到应用。这些灵巧手主要用于精密零部件的装配,如电子控制单元的连接器插拔、传感器的精确定位等。
相比人工操作,灵巧手在重复性任务中表现出更高的一致性和精度。一项对比研究显示,在汽车发动机零部件装配中,灵巧手的装配精度提升了40%,生产效率提高了25%。

电子制造的精密需求
在电子制造领域,灵心巧手的42自由度科研版被用于中医推拿机器人和精密电子组装。这种高自由度的设计使得机器人能够完成类似人手的复杂动作。
帕西尼感知的DexH13凭借其1956个TPU触觉传感器,在特种环境作业中表现出色。该产品已经在地铁安检等场景中实现商业化部署,证明了灵巧手技术的实用价值。
7.2 医疗康复领域的突破
医疗康复是灵巧手技术最具人文价值的应用领域。假肢技术的发展正在为残障人士带来新的希望,而康复机器人则为治疗师提供了新的工具。
仿生假肢的技术进展
伯牙智能的19自由度假肢灵巧手采用形状记忆合金驱动,重量仅370g,接近真实人手重量。这种轻量化设计对于长时间佩戴非常重要。
假肢的控制通常采用肌电信号(EMG),通过检测残肢肌肉的电活动来推断用户的操作意图。现代假肢集成了机器学习算法,能够适应用户的个人习惯,提供更自然的控制体验。
康复训练的个性化方案
强脑科技的Revo 2灵巧手集成了非侵入式脑机接口,为渐冻症等神经疾病患者提供了新的交互可能。0.01N的力分辨率和30+材质识别能力使得这种设备能够完成拧开关等日常操作。
康复机器人不仅能够辅助患者完成动作,还能够记录详细的康复数据,为医生制定个性化治疗方案提供科学依据。这种数据驱动的康复方法正在改变传统的治疗模式。
7.3 服务机器人的市场机遇
随着人口老龄化和劳动力成本上升,服务机器人市场迎来快速发展。灵巧手作为机器人与人类交互的关键接口,其重要性日益凸显。
家庭服务的应用前景
宇树科技的Dex5灵巧手配合其人形机器人H1,在家庭服务场景中展现出巨大潜力。这套系统能够完成整理房间、准备简单餐食、照料宠物等日常任务。
优必选的Walker S1配备了第三代自研灵巧手技术,支持15kg负重行走。这种大负载能力使得机器人能够胜任搬运重物、协助老人起立等体力劳动。
商业服务的创新应用
在商业服务领域,灵巧手技术正在催生新的服务模式。餐饮机器人能够完成复杂的食物准备工作,零售机器人能够精确操作各种商品,清洁机器人能够处理各种复杂的清洁任务。
这些应用的共同特点是需要处理多样化的对象和复杂的环境。传统的专用机器人往往只能处理特定类型的任务,而配备灵巧手的通用机器人则具有更强的适应性。## 8. 技术发展趋势与未来展望
8.1 硬件技术的演进方向
材料科学的革命性突破
新材料技术正在为灵巧手设计带来革命性的改变。液晶弹性体(LCE)作为一种新兴的智能材料,具有接近人类肌肉的功率密度。清华大学化学系杨忠强教授团队在LCE液晶聚合物方面的研究显示,这种材料能够实现快速响应、大变形和高循环稳定性。
形状记忆合金(SMA)技术也在不断成熟。新一代SMA材料在响应速度、驱动力和使用寿命方面都有显著提升。这些材料的应用将使灵巧手变得更加轻便、安静和高效。
制造工艺的数字化转型
3D打印技术在灵巧手制造中的应用日益广泛。多材料3D打印能够在一次成型过程中制造出包含刚性骨架、柔性关节和导电线路的复杂结构。这种制造方式不仅降低了成本,还提供了前所未有的设计自由度。
微纳制造工艺的发展使得传感器集成度不断提升。现在可以在指甲盖大小的芯片上集成数百个传感单元,为灵巧手提供丰富的感知信息。
8.2 人工智能算法的突破
大模型技术的应用前景
大模型技术为灵巧手控制带来了新的可能性。与传统的专用算法不同,大模型具有强大的泛化能力和零样本学习能力。这意味着经过训练的模型能够处理训练过程中未曾见过的任务和对象。
Physical Intelligence公司的pi0.5模型展示了这种能力的潜力。该模型采用双阶段推理架构,能够根据高级指令生成具体的操作序列,然后通过底层控制器执行精确的动作。
多模态融合的技术创新
未来的灵巧手系统将更加依赖多模态信息的融合。视觉、触觉、听觉甚至嗅觉信息的协同处理将使机器人获得更全面的环境感知能力。
这种多模态融合不仅体现在感知层面,还将延伸到决策和控制层面。不同模态的信息将在神经网络的不同层级进行融合,实现更智能的决策过程。
8.3 产业生态的构建
标准化工作的推进
随着灵巧手技术的成熟,行业标准化工作变得越来越重要。IEEE、ISO等国际标准化组织正在制定相关的技术标准,涵盖安全性、互操作性、性能评估等多个方面。
中国在这一过程中发挥着重要作用。国内企业和研究机构积极参与国际标准的制定,在某些细分领域甚至起到了引领作用。
开源生态的繁荣
开源社区的发展为灵巧手技术的普及提供了重要支撑。从GaiaHand这样的硬件开源项目,到各种软件框架和算法库,开源生态正在降低技术门槛,加速创新步伐。
GitHub上与灵巧手相关的开源项目数量呈指数级增长。这些项目不仅包含完整的设计方案,还提供了详细的文档和教程,为初学者提供了宝贵的学习资源。
8.4 市场前景与投资机会
市场规模的快速增长
根据多家市场研究机构的预测,全球灵巧手市场规模将在未来5年内保持高速增长。预计到2028年,市场规模将达到40亿美元,年复合增长率超过25%。
这一增长主要由以下因素驱动:工业4.0需求推动、服务机器人市场扩大、技术成熟度提升以及成本持续下降。
投资热点与风险
当前的投资热点主要集中在核心技术突破、垂直应用解决方案和平台化技术服务三个方面。种子轮投资主要关注技术验证,A轮关注产品化开发,B轮及以后则更关注市场拓展和规模化发展。
投资风险主要来自技术风险、市场风险、竞争风险和政策风险。投资者需要综合考虑这些因素,选择具有技术壁垒和市场前景的项目。
9. 机器人描述格式与标准化生态
9.1 URDF统一机器人描述格式
统一机器人描述格式(URDF)是机器人建模的核心标准,为灵巧手开发提供了统一的建模语言。URDF采用XML格式,能够精确描述机器人的运动学、动力学和视觉特性。
URDF的核心组件
URDF文件主要由以下几个关键元素构成:
<robot name="dexterous_hand">
<link name="palm">
<visual>
<geometry>
<mesh filename="palm.stl"/>
</geometry>
</visual>
<collision>
<geometry>
<mesh filename="palm_collision.stl"/>
</geometry>
</collision>
<inertial>
<mass value="0.15"/>
<inertia ixx="0.001" ixy="0" ixz="0" iyy="0.001" iyz="0" izz="0.001"/>
</inertial>
</link>
<joint name="finger1_joint" type="revolute">
<parent link="palm"/>
<child link="finger1"/>
<axis xyz="0 0 1"/>
<limit lower="-1.57" upper="1.57" effort="10" velocity="3.14"/>
</joint>
</robot>
这种标准化格式的优势在于跨平台兼容性。无论是在ROS、MuJoCo、Isaac Sim还是PyBullet中,同一个URDF文件都能被正确解析和使用。
分层建模策略
现代灵巧手URDF建模采用分层策略来平衡精度和性能:
可视化层使用高精度网格模型,提供逼真的视觉效果。这些模型通常包含数万个三角面,能够展现精细的表面纹理和几何细节。
碰撞检测层使用简化的凸包模型,大幅提升物理仿真的计算效率。通过将复杂几何简化为基本形状的组合,碰撞检测速度可以提升数个数量级。
9.2 MuJoCo MJCF格式的优势
MuJoCo XML格式(MJCF)专为高性能物理仿真设计,在灵巧手建模中具有独特优势。相比URDF,MJCF提供了更精细的物理参数控制和更高效的仿真性能。
先进的接触建模
MJCF支持多种接触模型,这对灵巧手的精确仿真至关重要:
<contact>
<pair geom1="finger_tip" geom2="object"
solref="0.01 1" solimp="0.99 0.99 0.01"/>
</contact>
<material name="soft_contact">
<property name="friction" value="0.8 0.005 0.0001"/>
<property name="solref" value="0.02 1.0"/>
</material>
这种精细的接触建模能够准确模拟不同材质间的摩擦特性,这对于评估抓取策略的稳定性非常重要。
可微分仿真支持
MJCF原生支持可微分仿真,这为基于梯度的优化算法提供了强大工具。在灵巧手控制器设计中,可以直接对控制参数进行梯度下降优化。
9.3 开源灵巧手模型资源
根据robot-descriptions项目的统计,当前开源社区提供了丰富的灵巧手模型资源:
顶级开源灵巧手模型
| 模型名称 | 制造商 | 格式支持 | 自由度 | 特色功能 |
|---|---|---|---|---|
| Allegro Hand | Wonik Robotics | URDF, MJCF | 16 | 高精度力控 |
| Shadow Hand E3M5 | Shadow Robot Company | MJCF | 24 | 类人手结构 |
| LEAP Hand v1 | Carnegie Mellon | URDF | 16 | 开源硬件 |
| Ability Hand | PSYONIC | URDF, MJCF | 6 | 肌电控制 |
| Robotiq 2F-85 | Robotiq | URDF, MJCF, Xacro | 2 | 工业应用 |
模型质量评估标准
优秀的灵巧手模型应当具备以下特征:
完整的几何描述:包含高质量的视觉模型和简化的碰撞模型。精确的惯性参数:基于实际硬件测量的质量、重心和惯性张量。合理的关节限制:反映真实硬件的运动范围和力矩限制。详细的文档说明:包含使用指南、参数说明和示例代码。
9.4 跨平台兼容性解决方案
现代灵巧手开发面临多平台适配的挑战。robot_descriptions.py项目提供了统一的Python接口,支持115+种机器人模型的跨平台加载:
from robot_descriptions import allegro_hand_description
from robot_descriptions import shadow_hand_description
from robot_descriptions import leap_hand_description
# 统一的加载接口
urdf_path = allegro_hand_description.URDF_PATH
mjcf_path = shadow_hand_description.MJCF_PATH
# 平台无关的模型加载
import pinocchio as pin
import mujoco
robot = pin.buildModelFromUrdf(urdf_path)
mj_model = mujoco.MjModel.from_xml_path(mjcf_path)
这种标准化接口大大简化了多平台开发流程,研究者可以专注于算法开发而不必担心格式兼容性问题。
10. 总结
灵巧手技术正站在历史的转折点上。从实验室的概念验证到工业应用的规模部署,从简单的抓取动作到复杂的精细操作,灵巧手技术的发展轨迹清晰地指向一个更加智能、更加灵活的机器人时代。
12. 参考资料
Robot Descriptions - 机器人模型标准化资源
robot_descriptions.py - Python机器人模型库
GAFRO Robot Descriptions - 多机器人平台URDF库
更多推荐
 30
30 0
0- 0



 已为社区贡献9条内容
已为社区贡献9条内容

所有评论(0)